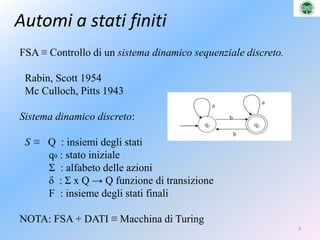

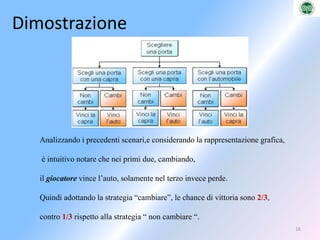

Il documento tratta dei modelli per la descrizione di processi probabilistici, presentando un approccio composizionale ai sistemi complessi attraverso automi a stati finiti e automi probabilistici. Si discute la necessità di una comunicazione tra componenti di sistemi distribuiti per superare le criticità dei modelli esistenti e per calcolare le probabilità di raggiungere stati critici. Viene infine illustrato il problema di Monty Hall, evidenziando come cambiare scelta possa aumentare le probabilità di vincita.