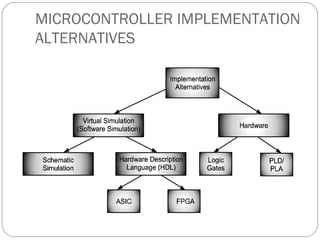
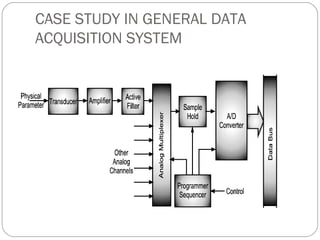
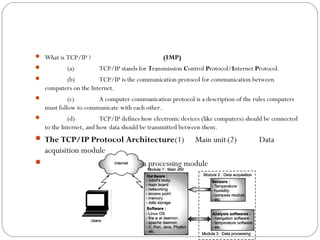
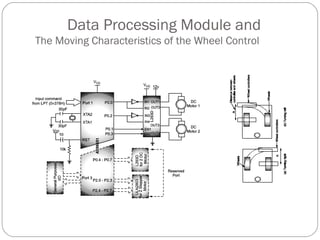

The document describes the design steps for a microcontroller-based system and case studies of microcontroller applications. It discusses 10 steps for microcontroller design: 1) justification, 2) operations definition, 3) instruction set definition, 4) architecture definition, 5) ALU design/implementation, 6) register file, 7) instruction register, 8) datapath for processing and control, 9) program counter/jumps/transfers, and 10) control unit. It also covers microcontroller performance factors and provides examples of data acquisition and robotic systems controlled by microcontrollers.