Download as PDF, PPTX
![1. INTRODUCTION
Concept of entropy was founded by [Shannon, 1948]
Let S be the sample space belongs to random events. Compose this sample
space into a finite number of mutually exclusive events nn EEE ...,,,1 , whose
respective probabilities are nn ppp ...,,,1 , then the average amount of
information or Shannon s entropy is defined:
iiii ppEInfpPH log)()(
n
1i
n
1i
(1.1)
H(P) is always non negative. Its maximum value depends on n. It is equal to
nlog when all pi are equal.
Maximum Entropy Principle
2](https://image.slidesharecdn.com/paperidh110a1-140716233325-phpapp02/85/Two-parameter-entropy-of-uncertain-variable-2-320.jpg)
![7
Cont…
[ De Luca and Termini, 1972] -- Fuzzy entropy by using Shannon function.
[Liu, 2009] proposed the concept of entropy of uncertain variable
(Characterizes the uncertainty of uncertain variable resulting from
information deficiency.)
[Liu et al., 2012] proposed one parametric measure of entropy of uncertain
variable
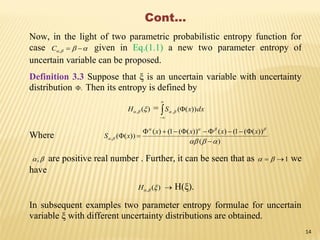
[Wada and Suyari, 2007] proposed two parametric generalization of
Shannon-Khinchin axioms and proved that the entropy function satisfying
two parameter generalized Shannon Khinchin axioms is given by Eq.(1.1) ,
n
i
ii
n
C
pp
pppS
1 ,
21, ),,(
(1.9)
where ,C is a function of and satisfying certain conditions.
One parametric [Tsallis, 1988] entropy and [Shannon, 1948] entropy
recovered for specific values of and .](https://image.slidesharecdn.com/paperidh110a1-140716233325-phpapp02/85/Two-parameter-entropy-of-uncertain-variable-7-320.jpg)
![Cont…
Uncertainty theory was founded by [Liu, 2007] and refined by
[Liu, 2010] .
Uncertainty theory was widely developed in many disciplines,
such as uncertain process [Liu, 2008], uncertain calculus,
uncertain differential equation [Liu, 2009], uncertain risk analysis
[Liu, 2010a], uncertain inference [Liu, 2010b], uncertain statistics
[Liu, 2010c] and uncertain logic [Li and Liu, 2009].
[Liu, 2009] proposed the definition of uncertain entropy resulting
from information deficiency. [Dai and Chen, 2009] investigated
the properties of entropy of function of uncertain variables and
introduced maximum entropy principle for uncertain variables.
Inspired by two parametric probabilistic entropy, this paper
introduces a new two parameter entropy in the framework of
uncertain theory and discusses its properties.
8](https://image.slidesharecdn.com/paperidh110a1-140716233325-phpapp02/85/Two-parameter-entropy-of-uncertain-variable-8-320.jpg)
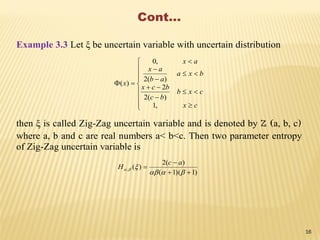
![2. Preliminaries
Let be non-empty set and is a algebra over . Each element is called
an event. Uncertain measure M was introduced as a set function satisfying the
following five axioms [Liu, 2007]:
Axiom 1. (Normality Axiom) M{ }=1 for universal set .
Axiom 2. (Monotonicity Axiom) M{ 1 } M{ 2 } whenever 21 .
Axiom 3. (Self-Duality Axiom) M{ }+ M{ c
} = 1 for any event .
Axiom 4. (Countable Subadditivity Axiom) For every countable sequence of
events i , we have
M{
1i
i }
1i
M i
Axiom 5. (Product Measure Axiom) Let k be non empty sets on which Mk are
uncertain measures nk ,...,2,1 , respectively. Then product uncertain measure on
the product algebra n 21 satisfying
M{
n
k
k
1
} nk1
min
1i
Mk k .
Where kk , nk ,...,2,1 . 9](https://image.slidesharecdn.com/paperidh110a1-140716233325-phpapp02/85/Two-parameter-entropy-of-uncertain-variable-9-320.jpg)
![Cont…
Definition 2.1 [Liu, 2007] Let be non-empty set and is a algebra over ,
and M an uncertain measure. Then the triplet ( ,, M) is called an uncertainty
space.
Definition 2.2 [Liu, 2007] An uncertain variable is a measurable function from an
uncertainty space ( ,, M) to the set of real numbers.
Definition 2.3 [Liu, 2007] The uncertainty distribution of an uncertain variable
is defined by
)(x M{ x }.
Theorem 2.1 (Sufficient and Necessary Condition for Uncertainty distribution
[Peng and Iwamura, 2010]) A function is an uncertainty distribution if and only
if it is an increasing function except 0)( x and 1)( x .
Example 2.1 An uncertain variable is called normal if it has a normal uncertainty
distribution
1
3
)(
exp1)(
xe
x
denoted by N ( ,e ) where e and σ are real numbers with σ > 0. Then we recall the
definition of inverse uncertainty distribution as follows.
10](https://image.slidesharecdn.com/paperidh110a1-140716233325-phpapp02/85/Two-parameter-entropy-of-uncertain-variable-10-320.jpg)
![Cont…
Definition 2.6 (Independence of uncertain variable [Liu, 2007] )The uncertain
variables n ,, 21 are said to be independent if
M
m
i
iB
1
= ni1
min M iB
for Borel sets nBBB ,,, 21 of real numbers.
Theorem 2.2 [Liu, 2007] Assume ξ1, ξ2, . . . , ξn are independent uncertain
variables with regular uncertainty distribution Φ1,Φ2, . . . ,Φn, respectively. If
n
f : is a strictly increasing function, then uncertain variable ξ = f (ξ1, ξ2, . . .
, ξn) has inverse uncertainty distribution
10)),(,),(),(()( 11
2
1
1
1
ttttft n
Theorem 2.3 [Liu, 2007] Assume ξ1, ξ2, . . . , ξn are independent uncertain
variables with regular uncertainty distribution Φ1,Φ2, . . . ,Φn, respectively. If
n
f : is a strictly decreasing function, then uncertain variable
ξ = f (ξ1, ξ2, . . . , ξn) has inverse uncertainty distribution
10)),1(,),1(),1(()( 11
2
1
1
1
ttttft n
11](https://image.slidesharecdn.com/paperidh110a1-140716233325-phpapp02/85/Two-parameter-entropy-of-uncertain-variable-11-320.jpg)
![Cont…
Theorem 2.4 ([Liu, 2007]) Let n ,, 21 be independent uncertain variables with
regular uncertainty distribution ,,,, 21 n respectively. If n
f : be strictly
decreasing function with respect to mxxx ,, 21 and strictly increasing function with
,,, 21 nmm xxx then ),,( 21 nf is uncertain variable with uncertainty
distribution with inverse uncertainty distribution
.10)),1(,),1(),(,),(),(()( 11
1
11
2
1
1
1
ttttttft nmm
12](https://image.slidesharecdn.com/paperidh110a1-140716233325-phpapp02/85/Two-parameter-entropy-of-uncertain-variable-12-320.jpg)
![3. Two Parameter Entropy
In this section, we will introduce the definition and results of two parameter
entropy of uncertain variable. For the purpose, we recall the entropy of uncertain
variable proposed by [Liu, 2009].
Definition 3.1 ([Liu, 2009]) Suppose that ξ is an uncertain variable with
uncertainty distribution . Then its entropy is defined by
H(ξ)= dxxS
))((
Where )).(1ln())(1()(ln)())(( xxxxxS
We set 00ln0 throughout this paper. By the enlightenment of [Tsallis, 1988]
entropy, [Liu et al. , 2012] defined the single parameter entropy.
Definition 3.2 ([Liu et al. , 2012]) Suppose that ξ is an uncertain variable with
uncertainty distribution . Then its entropy is defined by
)(qH = dxxSq
))((
Where
)1(
]))(1())((1[
))((
qq
xx
xS
qq
q
q is a positive real number . Further, it can be seen that as 1q we have
)(qH H(ξ).
13](https://image.slidesharecdn.com/paperidh110a1-140716233325-phpapp02/85/Two-parameter-entropy-of-uncertain-variable-13-320.jpg)
![18
Cont…
Theorem 4.3 Let ξ1, ξ2, . . . , ξn are independent uncertain variables with
regular uncertainty distribution Φ1,Φ2, . . . ,Φn, respectively. If n
f :
is a strictly monotone function, then the uncertain variable ξ = f (ξ1, ξ2, . .
. , ξn) has an entropy
.)())(,),(),(()( ,
1
0
11
2
1
1, dttStttfH n
Theorem 4.4 Let ξ and η be independent uncertain variables. Then for
any real numbers a and b,
.][||][||][ ,,, HbHabaH ](https://image.slidesharecdn.com/paperidh110a1-140716233325-phpapp02/85/Two-parameter-entropy-of-uncertain-variable-18-320.jpg)
![19
Conclusions
In this paper, the entropy of uncertain variable and its properties are recalled. On
the basis of the entropy of uncertain variable and inspired by two parameter
probabilistic entropy (1.9), two parameter entropy of uncertain variable is
introduced and explored its several important properties. Two parameter entropy of
uncertain variable Proposed in this paper, makes the calculation of uncertainty of
uncertain variable more general and flexible by choosing an appropriate values of
parameters α and β. Further, the results obtained by [Liu et al., 2012] for single
parameter entropy of uncertain variable and [Dai and Chen, 2009] for entropy of
uncertain variable are the special cases of results obtained in this paper.](https://image.slidesharecdn.com/paperidh110a1-140716233325-phpapp02/85/Two-parameter-entropy-of-uncertain-variable-19-320.jpg)
![20
References
[1] B. Liu, Fuzzy Process, Hybrid Process and Uncertain Process, Journal of
Uncertain Systems, 2 (1) (2008) 3-16.
[2] B. Liu, Some Research Problems in Uncertainty Theory, Journal of Uncertain
Systems, 3(1) (2009) 3-10.
[3] B. Liu, Uncertain Risk Analysis and Uncertain Reliability Analysis, Journal of
Uncertain Systems, 4(3) (2010a) 163-170.
[4] B. Liu, Uncertain Set Theory and Uncertain Inference Rule with Application to
Uncertain Control, Journal of Uncertain Systems, 4(2) (2010b) 83-98.
[5] B. Liu, Uncertainty Theory, 2nd Edition, Springer- Verlag, Berlin, 2007.
[6] B. Liu, Uncertainty Theory: A Branch of Mathematics for Modeling Human
Uncertainty, Springer-Verlag, Berlin, 2010c.
[7] C. Shannon, The Mathematical Theory of Communication, The University of
Illinois Press, Urbana, 1949.
[8] C. Tsallis, Possible Generalization of Boltzmann-Gibbs, Statistics, 52(1-2)
(1988) 479-487.](https://image.slidesharecdn.com/paperidh110a1-140716233325-phpapp02/85/Two-parameter-entropy-of-uncertain-variable-20-320.jpg)
![21
[9]De Luca and S. Termini, A Definition of Non probabilistic Entropy in the Setting
of Fuzzy Sets Theory, Information and Control, 20 (1972) 301-312.
[10] J. Liu, L. Lin, S. Wu, Single Parameter Entropy of Uncertain Variables,
Applied Mathematics, 3 (2012) 888-894.
[11] T. Wada and H. Suyari, A two-parameter generalization of Shannon–
Khinchin axioms and the uniqueness theorem, Physics Letters A, 368 (2007) 199–
205.
[12] W. Dai and X. Chen, Entropy of Function of Uncertain Variables,
Technical Report, 2009.
[13] W. Dai, Maximum Entropy Principle of Quadratic Entropy of Uncertain
Variables, Technical Report, 2010.
[14] X. Li and B. Liu, Hybrid Logic and Uncertain Logic, Journal of Uncertain
Systems, 3(2) (2009) 83-94.
[15] Z. X. Peng and K. Iwamura, A Sufficient and Necessary Condition of
Uncertainty Distribution, Journal of Inter-disciplinary Mathematics, 13(3) (2010)
277- 285.](https://image.slidesharecdn.com/paperidh110a1-140716233325-phpapp02/85/Two-parameter-entropy-of-uncertain-variable-21-320.jpg)


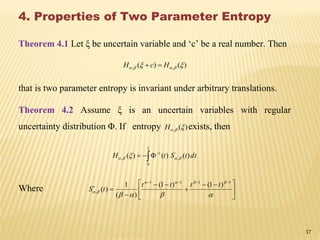
This document introduces a two parameter entropy measure for uncertain variables based on two parameter probabilistic entropy. It begins by reviewing concepts of uncertainty theory such as uncertainty space, uncertain variables, and independence of uncertain variables. It then defines entropy of an uncertain variable using Shannon entropy. Previous work on one parameter entropy of uncertain variables is summarized. The document proposes a new two parameter entropy for uncertain variables, providing its definition and examples of calculating it for specific uncertainty distributions. Properties of the two parameter entropy are discussed.
















































![谷歌留痕技术 [ 𝙩𝙤𝙥 𝟮𝟯𝟯. 𝙘 𝙤𝙢 ]](https://cdn.slidesharecdn.com/ss_thumbnails/top233-260130174328-3833018c-thumbnail.jpg?width=640&height=640&fit=bounds)














