Download free for 30 days
Sign in
Upload
Language (EN)
Support
Business
Mobile
Social Media
Marketing
Technology
Art & Photos
Career
Design
Education
Presentations & Public Speaking
Government & Nonprofit
Healthcare
Internet
Law
Leadership & Management
Automotive
Engineering
Software
Recruiting & HR
Retail
Sales
Services
Science
Small Business & Entrepreneurship
Food
Environment
Economy & Finance
Data & Analytics
Investor Relations
Sports
Spiritual
News & Politics
Travel
Self Improvement
Real Estate
Entertainment & Humor
Health & Medicine
Devices & Hardware
Lifestyle
Change Language
Language
English
Español
Português
Français
Deutsche
Cancel
Save
Submit search
EN
Uploaded by
Fujimoto Keisuke
7,482 views
G2o
g2oの紹介です
Engineering
◦
Read more
14
Save
Share
Embed
Embed presentation
Download
Downloaded 62 times
1
/ 22
2
/ 22
3
/ 22
4
/ 22
5
/ 22
6
/ 22
7
/ 22
8
/ 22
9
/ 22
10
/ 22
11
/ 22
12
/ 22
13
/ 22
14
/ 22
15
/ 22
16
/ 22
17
/ 22
18
/ 22
19
/ 22
20
/ 22
21
/ 22
22
/ 22
More Related Content
PDF
SLAM開発における課題と対策の一例の紹介
by
miyanegi
PDF
20190307 visualslam summary
by
Takuya Minagawa
PDF
SSII2021 [TS1] Visual SLAM ~カメラ幾何の基礎から最近の技術動向まで~
by
SSII
PDF
SSII2019TS: 実践カメラキャリブレーション ~カメラを用いた実世界計測の基礎と応用~
by
SSII
PDF
ROS を用いた自律移動ロボットのシステム構築
by
Yoshitaka HARA
PPTX
CNN-SLAMざっくり
by
EndoYuuki
PDF
[DL輪読会]画像を使ったSim2Realの現況
by
Deep Learning JP
PPTX
SfM Learner系単眼深度推定手法について
by
Ryutaro Yamauchi
SLAM開発における課題と対策の一例の紹介
by
miyanegi
20190307 visualslam summary
by
Takuya Minagawa
SSII2021 [TS1] Visual SLAM ~カメラ幾何の基礎から最近の技術動向まで~
by
SSII
SSII2019TS: 実践カメラキャリブレーション ~カメラを用いた実世界計測の基礎と応用~
by
SSII
ROS を用いた自律移動ロボットのシステム構築
by
Yoshitaka HARA
CNN-SLAMざっくり
by
EndoYuuki
[DL輪読会]画像を使ったSim2Realの現況
by
Deep Learning JP
SfM Learner系単眼深度推定手法について
by
Ryutaro Yamauchi
What's hot
PDF
Visual SLAM: Why Bundle Adjust?の解説(第4回3D勉強会@関東)
by
Masaya Kaneko
PDF
【メタサーベイ】Neural Fields
by
cvpaper. challenge
PDF
オープンソース SLAM の分類
by
Yoshitaka HARA
PDF
NDTスキャンマッチング 第1回3D勉強会@PFN 2018年5月27日
by
Kitsukawa Yuki
PDF
Visual slam
by
Takuya Minagawa
PDF
tf,tf2完全理解
by
Koji Terada
PDF
【メタサーベイ】基盤モデル / Foundation Models
by
cvpaper. challenge
PDF
Introduction to YOLO detection model
by
WEBFARMER. ltd.
PDF
SLAM入門 第2章 SLAMの基礎
by
yohei okawa
PPTX
3次元計測とフィルタリング
by
Norishige Fukushima
PPTX
SLAM勉強会(3) LSD-SLAM
by
Iwami Kazuya
PDF
三次元点群処理ライブラリPCLと 統合ロボットシステム研究での 利用例の紹介
by
Ryohei Ueda
PDF
ORB-SLAMを動かしてみた
by
Takuya Minagawa
PDF
SSII2019企画: 画像および LiDAR を用いた自動走行に関する動向
by
SSII
PDF
20190825 vins mono
by
Takuya Minagawa
PDF
ARM CPUにおけるSIMDを用いた高速計算入門
by
Fixstars Corporation
PDF
PCL
by
Masafumi Noda
PDF
Sift特徴量について
by
la_flance
PPTX
Structure from Motion
by
Ryutaro Yamauchi
PDF
Autoware: ROSを用いた一般道自動運転向けソフトウェアプラットフォーム
by
Takuya Azumi
Visual SLAM: Why Bundle Adjust?の解説(第4回3D勉強会@関東)
by
Masaya Kaneko
【メタサーベイ】Neural Fields
by
cvpaper. challenge
オープンソース SLAM の分類
by
Yoshitaka HARA
NDTスキャンマッチング 第1回3D勉強会@PFN 2018年5月27日
by
Kitsukawa Yuki
Visual slam
by
Takuya Minagawa
tf,tf2完全理解
by
Koji Terada
【メタサーベイ】基盤モデル / Foundation Models
by
cvpaper. challenge
Introduction to YOLO detection model
by
WEBFARMER. ltd.
SLAM入門 第2章 SLAMの基礎
by
yohei okawa
3次元計測とフィルタリング
by
Norishige Fukushima
SLAM勉強会(3) LSD-SLAM
by
Iwami Kazuya
三次元点群処理ライブラリPCLと 統合ロボットシステム研究での 利用例の紹介
by
Ryohei Ueda
ORB-SLAMを動かしてみた
by
Takuya Minagawa
SSII2019企画: 画像および LiDAR を用いた自動走行に関する動向
by
SSII
20190825 vins mono
by
Takuya Minagawa
ARM CPUにおけるSIMDを用いた高速計算入門
by
Fixstars Corporation
PCL
by
Masafumi Noda
Sift特徴量について
by
la_flance
Structure from Motion
by
Ryutaro Yamauchi
Autoware: ROSを用いた一般道自動運転向けソフトウェアプラットフォーム
by
Takuya Azumi
More from Fujimoto Keisuke
PDF
LiDAR-SLAM チュートリアル資料
by
Fujimoto Keisuke
PDF
Sliced Wasserstein Distance for Learning Gaussian Mixture Models
by
Fujimoto Keisuke
PDF
20180925 CV勉強会 SfM解説
by
Fujimoto Keisuke
PDF
YOLACT real-time instance segmentation
by
Fujimoto Keisuke
PDF
ML@Loft
by
Fujimoto Keisuke
PDF
CVPR2017 oral survey
by
Fujimoto Keisuke
PDF
F0-Consistent Many-to-many Non-parallel Voice Conversion via Conditional Auto...
by
Fujimoto Keisuke
PDF
Global optimality in neural network training
by
Fujimoto Keisuke
PDF
Cold-Start Reinforcement Learning with Softmax Policy Gradient
by
Fujimoto Keisuke
PDF
20190414 Point Cloud Reconstruction Survey
by
Fujimoto Keisuke
PDF
Stock trading using ChainerRL
by
Fujimoto Keisuke
PDF
ICCV2017一人読み会
by
Fujimoto Keisuke
PDF
Deep Learning Framework Comparison on CPU
by
Fujimoto Keisuke
PDF
Product Managerの役割、周辺ロールとの差異
by
Fujimoto Keisuke
PDF
Chainer meetup 9
by
Fujimoto Keisuke
PDF
A quantum computational approach to correspondence problems on point sets
by
Fujimoto Keisuke
PDF
Dynamic Routing Between Capsules
by
Fujimoto Keisuke
PDF
ChainerRLで株売買を結構頑張ってみた(後編)
by
Fujimoto Keisuke
PDF
Temporal Cycle Consistency Learning
by
Fujimoto Keisuke
PDF
Representation learning by learning to count
by
Fujimoto Keisuke
LiDAR-SLAM チュートリアル資料
by
Fujimoto Keisuke
Sliced Wasserstein Distance for Learning Gaussian Mixture Models
by
Fujimoto Keisuke
20180925 CV勉強会 SfM解説
by
Fujimoto Keisuke
YOLACT real-time instance segmentation
by
Fujimoto Keisuke
ML@Loft
by
Fujimoto Keisuke
CVPR2017 oral survey
by
Fujimoto Keisuke
F0-Consistent Many-to-many Non-parallel Voice Conversion via Conditional Auto...
by
Fujimoto Keisuke
Global optimality in neural network training
by
Fujimoto Keisuke
Cold-Start Reinforcement Learning with Softmax Policy Gradient
by
Fujimoto Keisuke
20190414 Point Cloud Reconstruction Survey
by
Fujimoto Keisuke
Stock trading using ChainerRL
by
Fujimoto Keisuke
ICCV2017一人読み会
by
Fujimoto Keisuke
Deep Learning Framework Comparison on CPU
by
Fujimoto Keisuke
Product Managerの役割、周辺ロールとの差異
by
Fujimoto Keisuke
Chainer meetup 9
by
Fujimoto Keisuke
A quantum computational approach to correspondence problems on point sets
by
Fujimoto Keisuke
Dynamic Routing Between Capsules
by
Fujimoto Keisuke
ChainerRLで株売買を結構頑張ってみた(後編)
by
Fujimoto Keisuke
Temporal Cycle Consistency Learning
by
Fujimoto Keisuke
Representation learning by learning to count
by
Fujimoto Keisuke
G2o
1.
CV勉強会@関東 CVで使えるツールLT大会 2016/04/17 @peisuke
2.
今日、紹介するツールは・・・
3.
g2o:General Graph Optimization
4.
Graph Optimizationとは? • エッジの情報を与えると・・・ 3.0 3.0 3.0 2.0 1.5 1.5 1.5 エッジ
5.
Graph Optimizationとは? 3.0 3.0 3.0 2.0 1.5 1.5 1.5 (0.0, 0.0) (2.8,
-0.2) (1.2, 2.4) (3.0, 2.0) (4.0, 1.0) • エッジの情報を与えると・・・ノードの位置が求まる ノード eij = d(pi-pj, mij) 拘束条件: p = argminΣeij
6.
g2oができること • エッジ情報から、最適なノード位置を算出 • 強み1:広い適用範囲 •
強み2:大規模データの取扱いが可能 • 強み3:ロバスト・高速な最適化計算
7.
g2oができること • エッジ情報から、最適なノード位置を算出 • 強み1:広い適用範囲 •
強み2:大規模データの取扱いが可能 • 強み3:ロバスト・高速な最適化計算 今日はここに フォーカス
8.
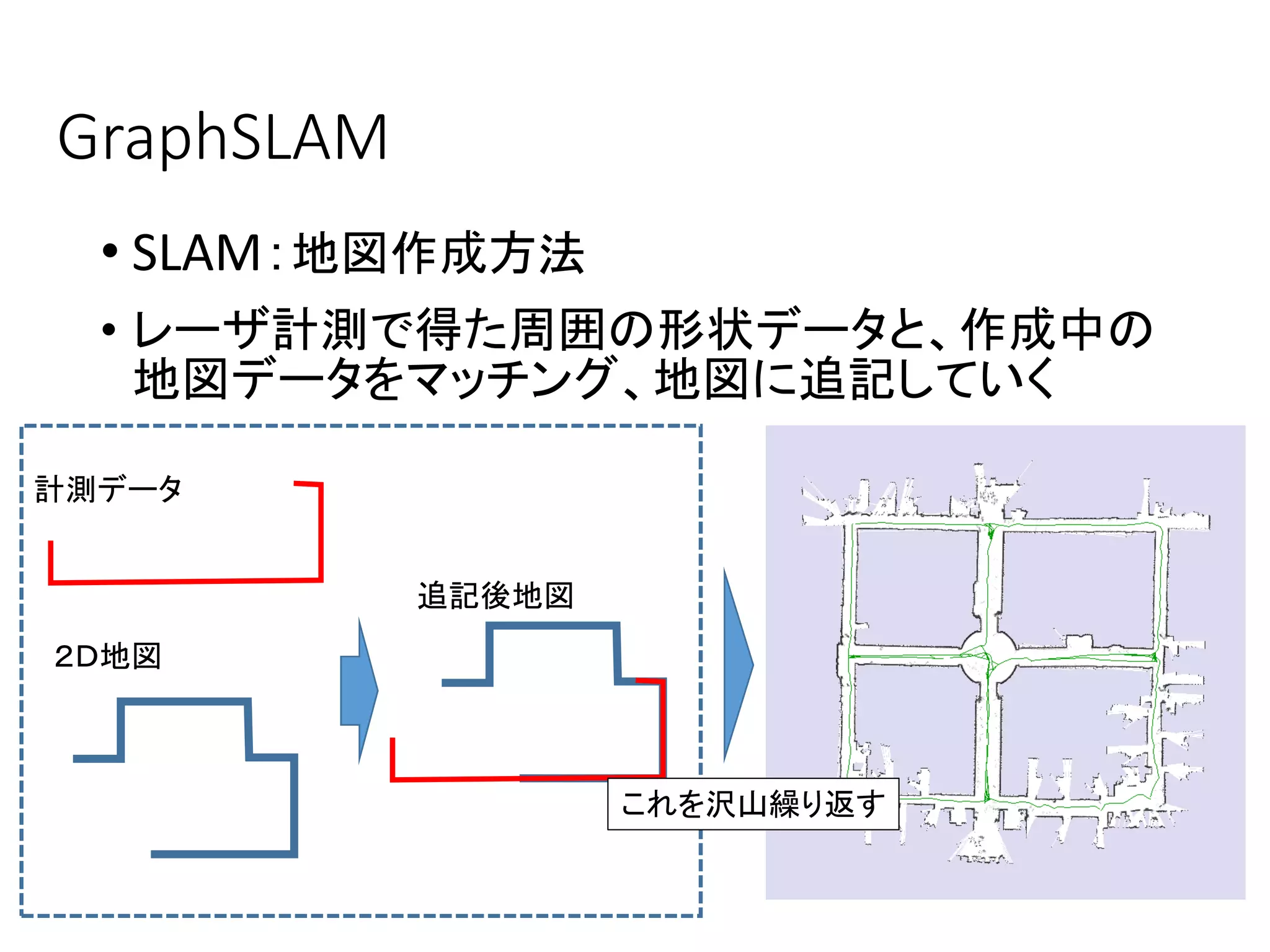
GraphSLAM • SLAM:地図作成方法 • レーザ計測で得た周囲の形状データと、作成中の 地図データをマッチング、地図に追記していく 計測データ 2D地図 追記後地図 これを沢山繰り返す
9.
GraphSLAM • 長い廊下を一周するとマッチング誤差が蓄積して、 スタートとゴールがつながらない 簡単なケース 何週もするコースでは酷いことに スタート ゴール
10.
GraphSLAM • 各計測地点をノード、計測地点間の相対姿勢を エッジとし・・・ 黒線・・・エッジ (ノードは省略)
11.
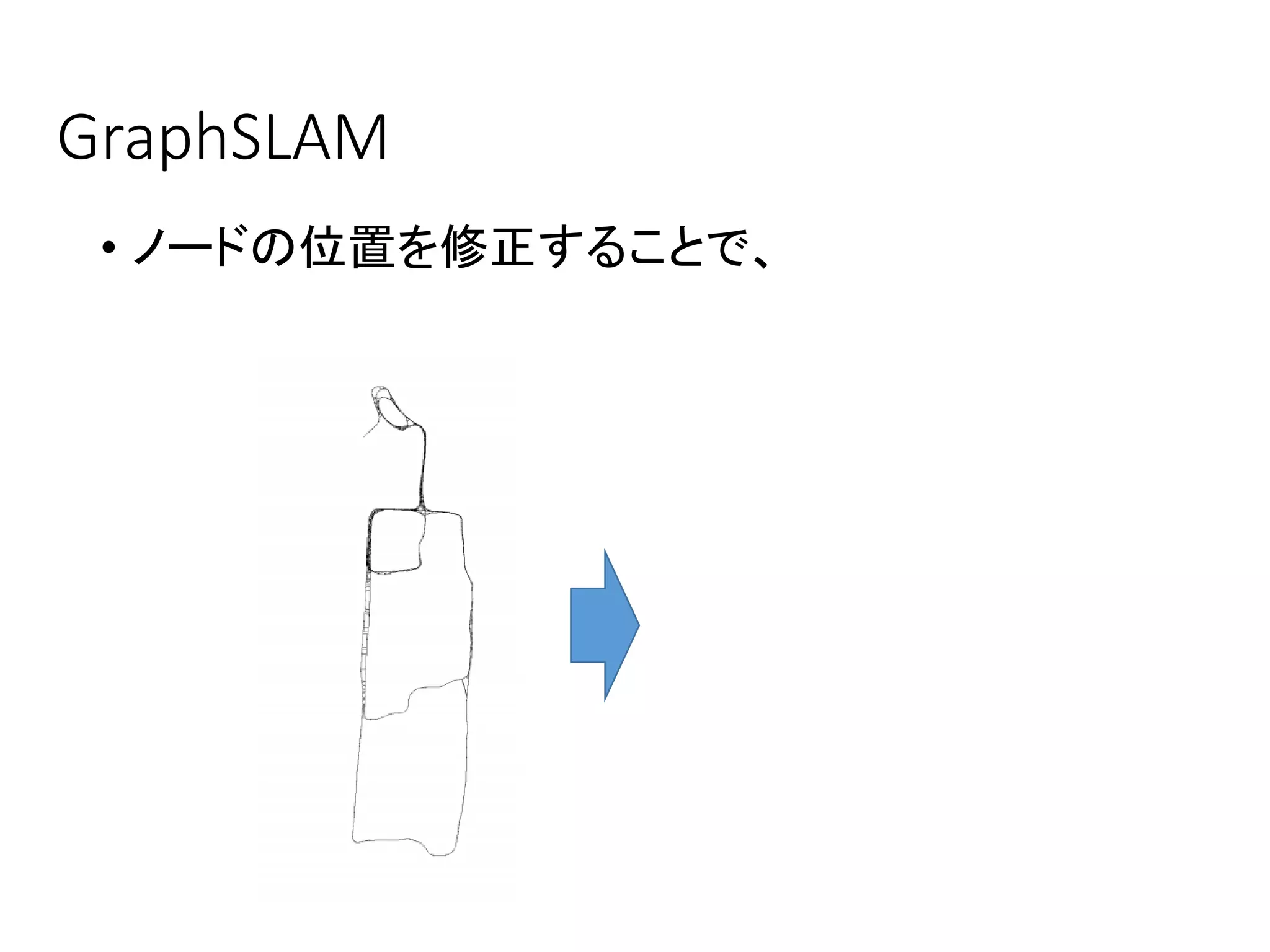
GraphSLAM • ノードの位置を修正することで、
12.
GraphSLAM • ノードの位置を修正することで、正しい地図ができ る
13.
何故、このツールを紹介した かというと・・・
14.
色々な問題に使える!!
15.
曲線フィッティングにも • データ点を通る曲線パラメータの推定 • 曲線のパラメータ(例えばax3+bx2+cx+dのa~d)を ノード、データとの誤差をエッジとする e
= d(y, ax3+bx2+cx+d) 拘束条件: a,b,c,d = argminΣeij y x
16.
バンドル調整にも • 複数枚の画像から、形状の3次元を復元する • カメラ姿勢と特徴点の位置の推定する問題
17.
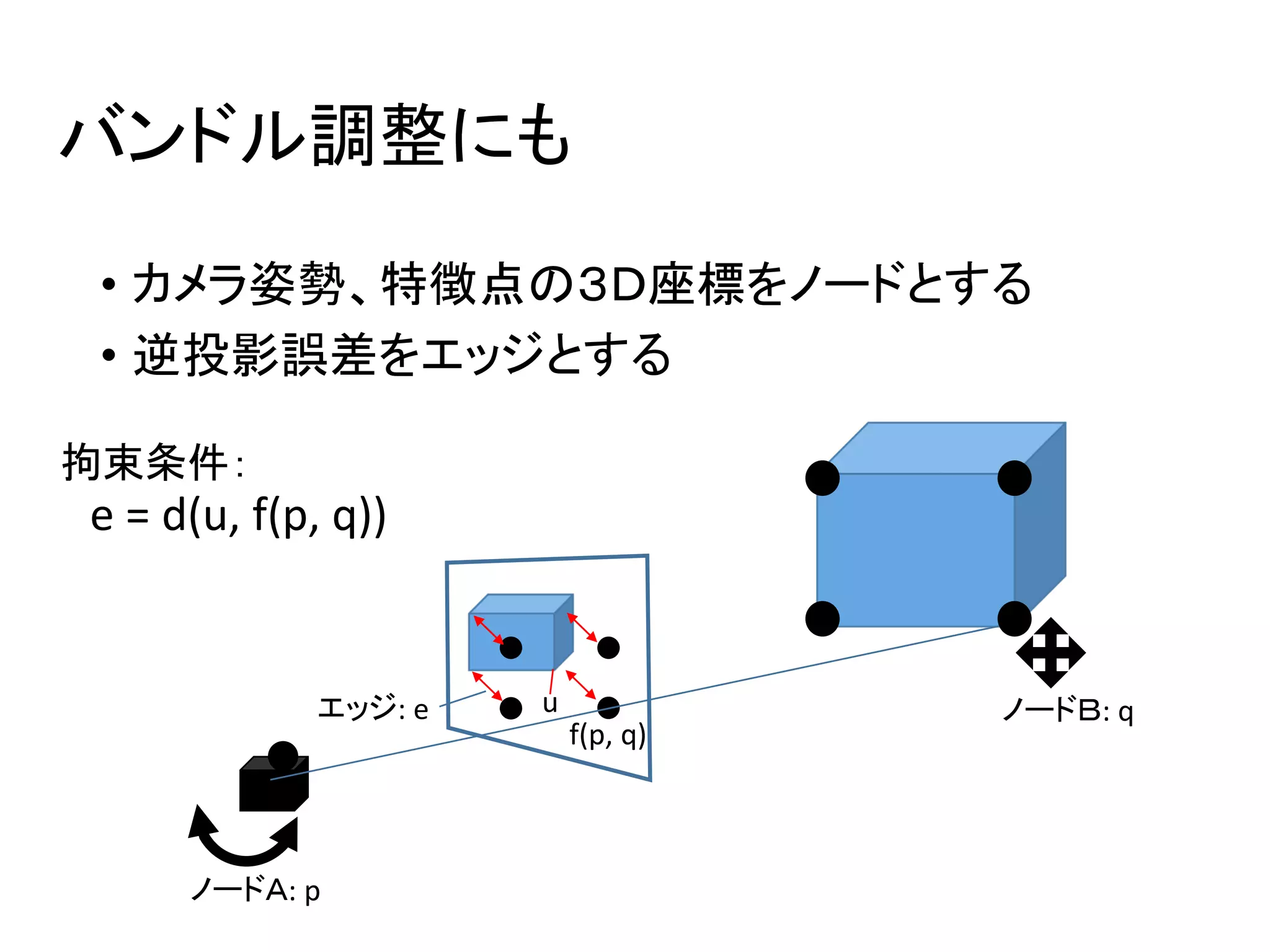
バンドル調整にも • カメラ姿勢、特徴点の3D座標をノードとする • 逆投影誤差をエッジとする ノードB:
q ノードA: p エッジ: e e = d(u, f(p, q)) 拘束条件: u f(p, q)
18.
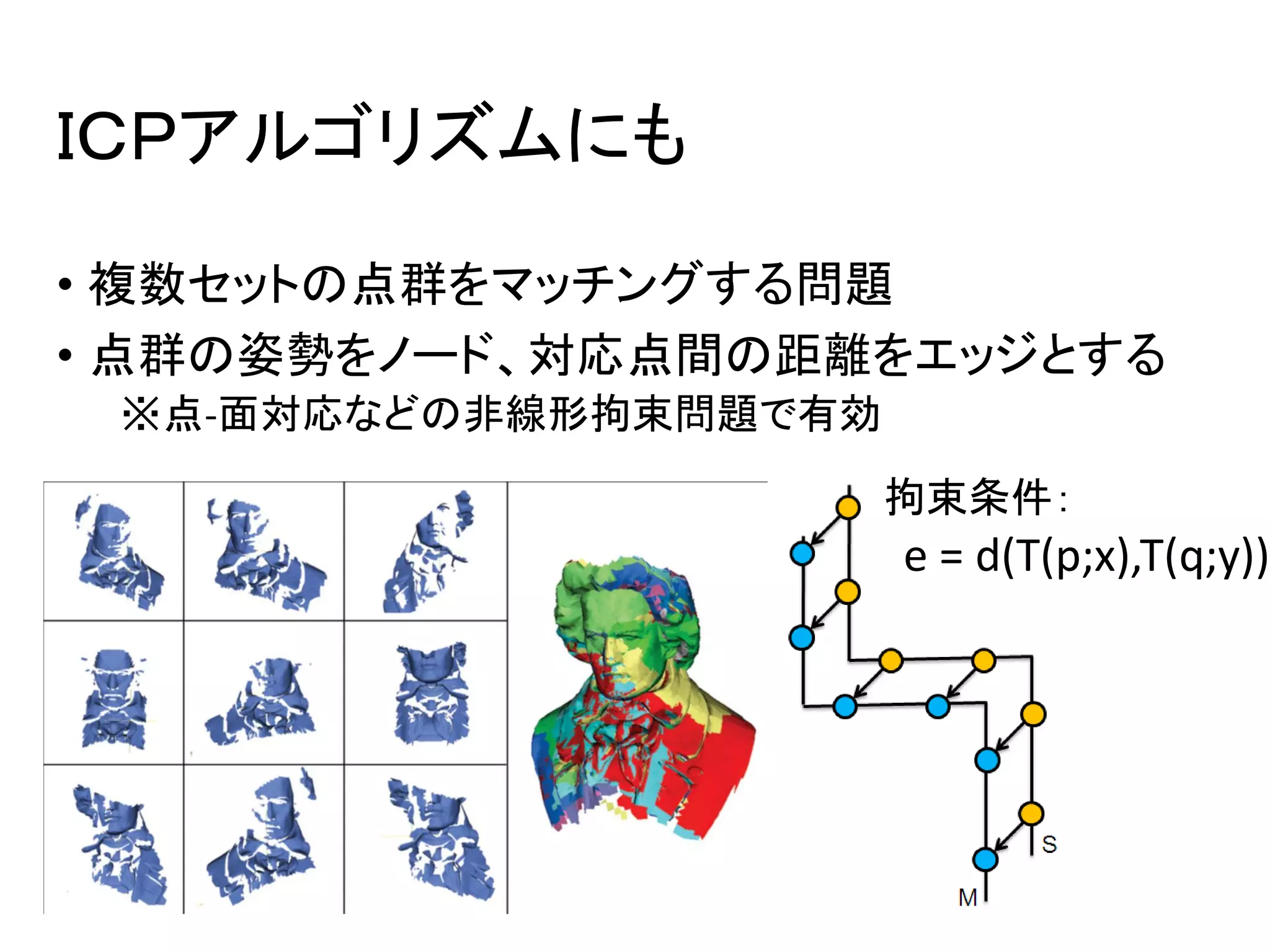
ICPアルゴリズムにも • 複数セットの点群をマッチングする問題 • 点群の姿勢をノード、対応点間の距離をエッジとする ※点-面対応などの非線形拘束問題で有効 e
= d(T(p;x),T(q;y)) 拘束条件:
19.
その他、たぶん適用できる例 • カメラキャリブレーション • 画像ノイズ除去 •
超解像 • オプティカルフロー • エッジ検出 • 輪郭検出 ・ ・ ・ 目的のパラメータを「ノード」、観測を「エッジ」とし、 ノードの良し悪しをエッジで評価できれば何でも良い
20.
どうやって使うの? ※時間の都合のため実装例は省略 • ノード・エッジが定義済みの問題ならば・・・ • ノードの初期位置を入力 •
座標値だけでなく、SE・SIMなども利用可 • ノード間の接続情報を入力 • GraphSLAMやバンドル調整などはデフォルトで用意 • 最適化実行 • 未定義の問題ならば・・・ • 各ノードついて、パラメータを設定するインタフェースを、 各エッジについて観測量を設定するインタフェースと、ヤ コビアン・評価関数を記述
21.
まとめ • エッジ情報から、最適なノード位置を算出するライブラリ 「g2o」を紹介 • 強み1:広い適用範囲 •
任意形式のノード/エッジが定義可能 • 強み2:大規模データの取扱いが可能 • 疎行列を容易に扱える • 強み3:ロバスト・高速な最適化計算 • Levenberg-Marquardt法なども実装済み
22.
ぜひ使ってみてください
Download



















![SSII2021 [TS1] Visual SLAM ~カメラ幾何の基礎から最近の技術動向まで~](https://cdn.slidesharecdn.com/ss_thumbnails/ts1-01-210607042113-thumbnail.jpg?width=640&height=640&fit=bounds)



![[DL輪読会]画像を使ったSim2Realの現況](https://cdn.slidesharecdn.com/ss_thumbnails/imagesim2real-201030025320-thumbnail.jpg?width=640&height=640&fit=bounds)








































