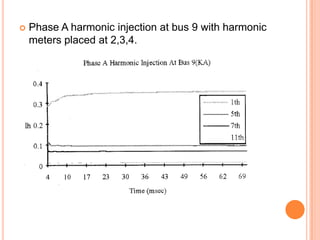
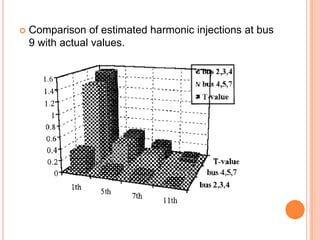
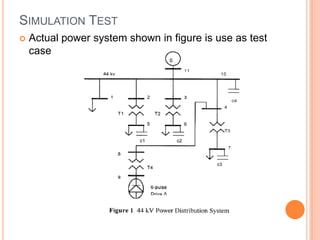
This document presents a method for using a Kalman filter to optimally locate a limited number of harmonic meters and dynamically estimate harmonic injections in an unbalanced power system. The Kalman filter formulation models harmonic injections as states and bus voltages as measurements. It determines optimal meter placements to minimize estimation error based on measurement and system noise. In a test case, the Kalman filter accurately estimated the harmonic injection at bus 9 was the major source when meters were placed at the suggested optimal locations of buses 4, 5, and 7.
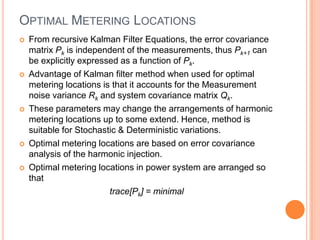
![Optimal Metering LocationsFrom recursive Kalman Filter Equations, the error covariance matrix Pk is independent of the measurements,thus Pk+1 can be explicitly expressed as a function of Pk.Advantage of Kalman filter method when used for optimal metering locations is that it accounts for the Measurement noise variance Rk and system covariance matrix Qk.These parameters may change the arrangements of harmonic metering locations up to some extend. Hence, method is suitable for Stochastic & Deterministic variations.Optimal metering locations are based on error covariance analysis of the harmonic injection.Optimal metering locations in power system are arranged so that trace[Pk] = minimal](https://image.slidesharecdn.com/optimalpresentationnikhilkulkarni-13189583375599-phpapp02-111018122154-phpapp02/85/Optimal-Control-Theory-11-320.jpg)
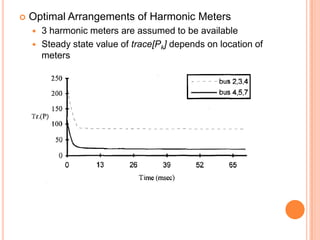
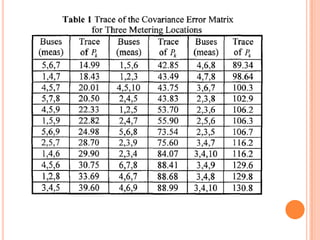
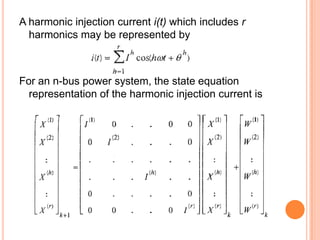
![Optimal Arrangements of Harmonic Meters3 harmonic meters are assumed to be availableSteady state value of trace[Pk] depends on location of meters](https://image.slidesharecdn.com/optimalpresentationnikhilkulkarni-13189583375599-phpapp02-111018122154-phpapp02/85/Optimal-Control-Theory-15-320.jpg)