1. The paper presents a state observer method for fast estimation of symmetrical components (positive, negative, zero sequences) of currents and voltages in a three-phase electrical network from measured signal values.
2. The method models the symmetrical components as state variables in a recursive state space model. It then designs a state observer using the model to estimate the symmetrical component states in real-time from the measured signals.
3. The paper provides an example applying the observer to estimate symmetrical components of fault current during a simulated double phase-to-ground fault, demonstrating the basic properties of the observer for use in digital power protection systems.
![Fast identification of symmetrical components by
use of a state observer
E. Rosdowski
M. Michalik
Indexing terms: Kalmanfilters, Power protection systems, State variables
sient properties of the relevant digital algorithms can be
Abstract: The paper presents the synthesis of a shaped by proper design of the complex filter.
state observer which can be applied to estimation In the paper, the application of a state observer to the
of the current and voltage symmetrical com- estimation of symmetrical components is presented. The
ponents in a three-phase electrical network. The symmetrical component phasors are calculated from the
state observer algorithm is based on the recursive orthogonal signal components which are the state vari-
model of the current and voltage generation ables of the recursive signal model. The model can be
process in a three-phase power system in which extended to match any measured input signals to be
the orthogonal phasors are used as the model estimated.
state variables. The synthesis of state observer is
shown under the assumption that the higher har-
monics as well as the decaying DC offset may be
present in the symmetrical component phasors. 2 State variable model of input signal
The state observer presented can be used as the
fast current and voltage symmetrical component Assume that the observed process (see Appendix 7.1) can
estimator in digital power protection systems. The be described by the real part of the discrete-signal model
calculation example included shows the basic given by vector eqn. 24. As the power system phasors and
properties of the observer in such an application. the symmetrical components can be expressed in the
same form, substituting eqn. 24 into eqn. 20, the resulting
instantaneous values of the real components of eqn. 20
can be represented by the following equations :
1 Introduction
Transformation of phasor co-ordinates into symmetrical
components is a very useful and well known tool in the
analysis of faults that may occur in such a three-phase
power system. As the symmetrical component transform-
ation also provides an easy and convenient way of system
fault identification it is widely used in power system pro-
tection design [l]. With the advent of digital protection
systems new numerical methods of the symmetrical com-
ponents calculation have been developed. Being essen-
tially different from those used in the design of analogue
protective systems the methods are based on two general
approaches.
In the first approach the measured input signals are
filtered digitally and the symmetrical components calcu-
The right-hand sides of eqn. 1 contain the orthogonal
lated by the definition (Appendix 7.1). To obtain the
phasors of the symmetrical components, assumed to be
necessary phase displacement between the measured
the state variables of the signal model, while the left-hand
signals a digital time delay is usually used [2].
In the second approach the orthogonal components of sides represent the measured input signals. Digital esti-
the equivalent three-phase system phasor are determined mation of the zero-sequence component can be carried
out by means of a separate single-phase algorithm since
first [3], and by use of a complex digital filter the equiva-
lent phasor is split into two counter-rotating phasors. this component can easily be filtered prior to sampling by
These phasors are used to calculate the positive and simple summation of currents or voltages in the analogue
negative symmetrical components. Steady-state and tran- input circuits of a protective system:
0IEE 1994
Paper 1483C (PIl), received 15th April 1994
The authors are with the Technical University of Wroclaw, Institute of
Electrical Engineering (I-8), 50-370 Wroclaw, U1 Wyb Wyspianskiego Vector &(k) can be estimated according to eqn. 2 by use
27, Poland of well-known methods [3, 41. So further consideration
IEE Proc.-Gener. Transm. Distrib., Vol. 141, N o . 6, November 1994 617](https://image.slidesharecdn.com/00335085-130315060346-phpapp01/85/00335085-1-320.jpg)
![Fast identification of symmetrical components by
use of a state observer
E. Rosdowski
M. Michalik
Indexing terms: Kalmanfilters, Power protection systems, State variables
sient properties of the relevant digital algorithms can be
Abstract: The paper presents the synthesis of a shaped by proper design of the complex filter.
state observer which can be applied to estimation In the paper, the application of a state observer to the
of the current and voltage symmetrical com- estimation of symmetrical components is presented. The
ponents in a three-phase electrical network. The symmetrical component phasors are calculated from the
state observer algorithm is based on the recursive orthogonal signal components which are the state vari-
model of the current and voltage generation ables of the recursive signal model. The model can be
process in a three-phase power system in which extended to match any measured input signals to be
the orthogonal phasors are used as the model estimated.
state variables. The synthesis of state observer is
shown under the assumption that the higher har-
monics as well as the decaying DC offset may be
present in the symmetrical component phasors. 2 State variable model of input signal
The state observer presented can be used as the
fast current and voltage symmetrical component Assume that the observed process (see Appendix 7.1) can
estimator in digital power protection systems. The be described by the real part of the discrete-signal model
calculation example included shows the basic given by vector eqn. 24. As the power system phasors and
properties of the observer in such an application. the symmetrical components can be expressed in the
same form, substituting eqn. 24 into eqn. 20, the resulting
instantaneous values of the real components of eqn. 20
can be represented by the following equations :
1 Introduction
Transformation of phasor co-ordinates into symmetrical
components is a very useful and well known tool in the
analysis of faults that may occur in such a three-phase
power system. As the symmetrical component transform-
ation also provides an easy and convenient way of system
fault identification it is widely used in power system pro-
tection design [l]. With the advent of digital protection
systems new numerical methods of the symmetrical com-
ponents calculation have been developed. Being essen-
tially different from those used in the design of analogue
protective systems the methods are based on two general
approaches.
In the first approach the measured input signals are
filtered digitally and the symmetrical components calcu-
The right-hand sides of eqn. 1 contain the orthogonal
lated by the definition (Appendix 7.1). To obtain the
phasors of the symmetrical components, assumed to be
necessary phase displacement between the measured
the state variables of the signal model, while the left-hand
signals a digital time delay is usually used [2].
In the second approach the orthogonal components of sides represent the measured input signals. Digital esti-
the equivalent three-phase system phasor are determined mation of the zero-sequence component can be carried
out by means of a separate single-phase algorithm since
first [3], and by use of a complex digital filter the equiva-
lent phasor is split into two counter-rotating phasors. this component can easily be filtered prior to sampling by
These phasors are used to calculate the positive and simple summation of currents or voltages in the analogue
negative symmetrical components. Steady-state and tran- input circuits of a protective system:
0IEE 1994
Paper 1483C (PIl), received 15th April 1994
The authors are with the Technical University of Wroclaw, Institute of
Electrical Engineering (I-8), 50-370 Wroclaw, U1 Wyb Wyspianskiego Vector &(k) can be estimated according to eqn. 2 by use
27, Poland of well-known methods [3, 41. So further consideration
IEE Proc.-Gener. Transm. Distrib., Vol. 141, N o . 6, November 1994 617](https://image.slidesharecdn.com/00335085-130315060346-phpapp01/75/00335085-1-2048.jpg)
![refers to estimation of the positive and negative sym- The fourth-order signal model shown (two symmetrical
metrical component only under the assumption that the components, each one being represented by two orthog-
zero-sequence component has been removed from the onal phasors) is valid for the fundamental frequency only.
measured signals fo,(k) = 0. In such a case the reduced If other components are present in the measured signals
state model for the positive and negative-sequence (decaying DC offset, higher harmonics) the model can
phasors can be obtained. It can be done noting that the easily be extended by the use of the same rules [4, 51.
positive and negative symmetrical components are The state-variable model of an exponentially decaying
related by the equation DC component described by the function
f d k ) + f W =fx(k) + j f @ ) =fW (3) (9)
wheref:(k) is the conjugate complex off2(k).Further, the
symmetrical components f , ( k ) and f 2 ( k ) in eqn. 3 can be where 7 is the time constant can be obtained if one notes
written as a sum of their orthogonal components (eqn. that the Taylor expansion of eqn. 9 takes the form [SI:
24) :
.fe(k + '1 =fdl(k +
=fd1(k) + Ufd2(k)+ U2fdk) + . ' ' (10)
where
while vector f ( k ) =f,(k) + jf,(k) can be determined from
the measured input signals as the linear combination of
phasors f, fb ,f, (see inverse eqn. 20). Under the assump-
. where f d i are state variables, i = 1, 2, 3, . . . . Also, any of
tion that the zero-sequence component has been filtered the state variables in eqn. 10 can be expressed in a similar
prior to sampling, f,(k) and fy(k) are related to the meas- way, for instance
ured input signal by fddk + l) = f d . d k ) + U f d 3 ( k ) + uzfd4(k) + ' ' ' (12)
Eqns. 9-12 result in the following state-variable model of
the decaying DC offset:
Thus the eqns. 4 and 5 describe the reduced measurement
model for the positive and negative symmetrical com- where, for a three-state model, (i = 3)
ponents only. The transformations of eqns. 2 and 5 can
easily be realised by analogue input circuits [ 3 ] so only
the pair of signals f,(k) and f,(k) need to be sampled for
further digital processing.
The recursive process model for two consecutive steps
can be derived from eqn. 25 so that
f,,(k + 1) = cos ufi,(k) - sin ufi,,(k) The model can be used to estimate any exponentially
decaying DC component regardless of its time constant 7 .
f,,(k + 1) = sin vfi,(k) + cos vfi,(k) (6) Moreover, the value of the time constant 7 can be calcu-
lated and according to eqn. 11:
where the index i refers to the symmetrical component
number (1-positive, 2-negative). Applying the transform-
ation of eqn.6 to phasors of the symmetrical components
the state-variable model can be obtained which, along
with eqn. 4, represents the reduced-signal model of the Accuracy of the time-constant estimation depends on the
symmetrical components for a three-phase electrical number of state variables in the model eqn. 14. The
model considered can be easily included into the overall
model of the signal to be observed. For example, the state
matrix A for the model which includes the third har-
monic and the decaying DC component described by the
three-state model takes the new extended form:
A, =A2
!
cos U -sin v
sin v cos U
cos (3v) -sin (34
A l z = [ A 1 A2], A , = A 2 =
H 1 2 = [ 01 0 1 - ; ] = [ H I
cos U
sin v
H21
-sin U
cos v
1 sin (30) cos (3u)
1 U
1 u
v*
= 1-
(164
618 I E E Proc.-Gene?. Transm. Distrib., Vol. 141, N o . 6, November 1994](https://image.slidesharecdn.com/00335085-130315060346-phpapp01/85/00335085-2-320.jpg)
![while the overall extended model for the positive at the origin in the z-plane the steady-state response of
sequence component is described by the observer can be obtained in n steps (the dead-beat
case) with n being the number of state variables in the
fl(k) Cfildk) fl,y(k) fidk) f13y(k) model. Such an observer, however, is very noise-sensitive.
fidi(k) fidz(k) fid3(k)lT (16b) In practice, the matrix Y eigenvalues can be determined
by simulation of the state-observer response to the
whereflix(k),fliy(k)are orthogonal components of the ith assumed excitation.
harmonic, and fldl(k), fid2(k), f,,,(k) are decaying DC Since the elements of the matrices Y and K are con-
components. stant the state observer is the continuously operating
The measurement matrix H,, must also be modified device so there is no need to detect the moment of the
and now its submatrices are fault occurrance as it is usually done for the Kalman
Hl=['
0 1 0 0 0 '
1
' filter or any other recursive filters with nonperiodically
variable parameters [ll].
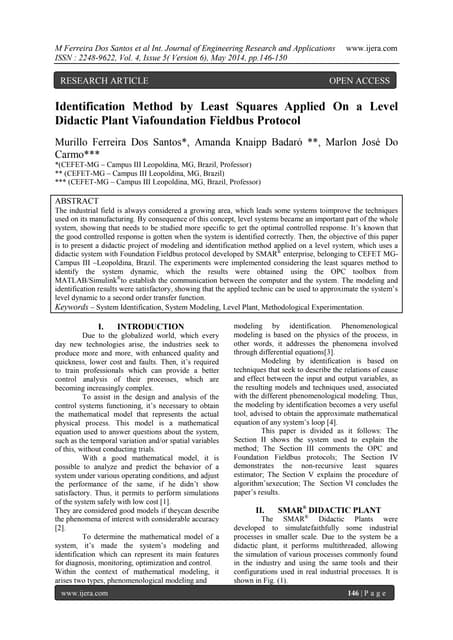
4 Estimation of symmetrical components of fault
current by use of state observer-xample
These considerations show that the state-variable signal
model of the symmetrical components can take different A double phase-to-ground fault in a single both-side-sup-
forms. Possible modifications of those models may result plied 400 kV transmission line was simulated by use of
in a reduced number of state variables (eqn. 8) or they EMTP model. The fault current waveforms in respective
may lead to extended forms if more complex input phases obtained from the model, which also included the
signals are considered. All the models can be applied to current transformers and the second-order antialiasing
estimation of the symmetrical components by the use of a Butterworth filters (f,= 265 Hz), are shown in Fig. 2.
state observer. The fault current waveforms were sampled with the sam-
pling rate of 800 Hz (16 samples per cycle).
3 State observer design for symmetrical
component estimation
The state vector of the system of eqn. 7 can be deter-
mined by means of the following state observer (Fig. 1)
~571:
f1Ak + 1) = A I , flZ(k) + KCfxy(k)- Hl, flZ(k)l (17)
power system
Fig. 1 Block diagram o symmetrical components estimator based on
f
state observer principle r time, rns
whereflz(k) is the estimate of the state vectorf,,(k), and Fig. 2 W a v e f o r m o phase currents during double phase t o ground
f
(a-b-g)fault
K is the observer gain matrix. The matrix K can easily be
calculated if eqn. 16 is written in the following form [8]:
fiz(k + 1) = ulr',z(k) + Kf,,(k) Two models were used to estimate the positive and
(18) negative sequence symmetrical components of the fault
where current : a three-state model (fundamental harmonic and
Y = A , , - KHlz a single-state DC offset model) and a six-state model
(19) (fundamental harmonic, third harmonic and a two-state
The transient properties of the state observer are deter- DC offset model). For comparison, the full-period stand-
mined by the eigenvalues of the matrix Y which can be ard Fourier filter was also used in the experiment.
adjusted by the proper selection of the matrix K. To The state observer's eigenvalues assumed in the con-
ensure stability of the observer all these eigenvalues sidered example are shown in Table 1. The observer
should be located inside unit circle in the z-plane. The matrix K was determined by the use of the method
procedure of the matrix K determination for assumed described in Appendix 7.2. The estimated magnitudes of
eigenvalues of Y is well known in the system theory [SI. symmetrical components of the fault current are shown
The relevant algorithm is shown in Appendix 7.2. in Fig. 3. The higher order observer ensures higher accu-
The selection rules of matrix Y eigenvalues are known racy estimation but of longer response time (more
[lo]. In particular, when all the eigenvalues are located numerical operations).
IEE Proc.-Gener. Transm. Distrib., Vol. 141, N o . 6 , November 1994 619](https://image.slidesharecdn.com/00335085-130315060346-phpapp01/85/00335085-3-320.jpg)
![Table 1 : Parameters of state observers design of the symmetrical component estimator. The
~~
Coefficients of matrix K = {k,,}
state-observer algorithm is effective and requires neither
prior-to-measurement knowledge of the time constant of
three-state six-state a DC offset that may be present in observed signals nor
Observer ObSeNer
detection of the fault occurrance instant. The method
i/y1 2 1 2 presented of signal model synthesis for symmetrical com-
1-0.176 1.312 -1.300 1.151 ponents can also be applied to design the Kalman filters.
2-1.312 -0.176 -1.151 - 1.300
3 2.299 0 -0.020 0.263
4-0.176 -1.31 2 -0.263 -0.020
5-1.312 0.176 5.752 0
6 0 2.299 2.466 0 6 References
7 -1.300 -1.1 51
-1.1 51 1.300 1 PHADKE, A.G., IBRAHIM, M. and HLIBKA, T.: ‘Fundamental
8
-0.020 -0.263 basis for distance relaying with symmetrical components’, IEEE
9
-0.263 0.020 Trans., 1977, PAS%, pp, 635-643
10
11 0 5.752 2 WISZNIEWSKI, A.: ‘Digital calculation of symmetrical com-
12 0 2.466 ponents in three phase grids’. Proceedings of Second IMECO-TC4
symposium, Warsaw, Poland, 1987, pp. 265-271
Eiaenvalues of matrix rY 3 LOBOS, T.: ‘Fast estimation of symmetrical components in real-
time’, IEE Proc. C, 1992,139, pp. 27-30
s,,,=0.3ijO.l s,,,=O.3+jO.l 4 ROSOLOWSKI, E.: ‘Analysis of digital algorithms applied in
s3= 0.3 s3, = 0.2 ij0.l power system protection’, Sci. pap. Inst. Electric Power Eng. Tech.
se = 0.3, se = 0.2 Linin Wrocfaw, 1992, (88). (in Polish)
5 DASH, P.K.: ‘Recursive functional expansive technique for
computer-based impedance and differential protection’, Electr.
Power Energy Syst., 1987,9, (4), pp. 225-232
6 ROSOLOWSKI, E.: ‘The method of state observer synthesis by the
use of the bidiagonal canonical form’, Arch. Control Sci., 1992, 1 ,
(XXXVII),(1-2), pp. 101-107
7 DEGENS, A.J.: ‘Microprocessor implemented digital filters for the
calculation of symmetrical components’, IEE Proc. C , 1982, 129, pp.
111-118
8 HOSTETTER, G.H.: ‘Recurswe discrete Fourier transformation’,
IEEE Trans., 1980, ASP-28, pp. 184-190
9 KACZOREK, T.: ’Linear control systems’. Vol. 1: ‘Analysis of
multivariable systems’ (Research Studies Press, 1992)
10 MURTY, Y.V.V.S., SMOLINSKI, W.J., and SIVAKUMAR, S.:
‘Design of digital protective scheme for power transformers using
0 20 40 60 80 100 optimal state observers’, IEE Proc. C , 1988, 135, pp. 224-230
time, rns 11 SACHDEV, M.S., and NAGPAL, M.: ‘A recursive least error
squares algorithm for power system relaying and measurement
applications’, IEEE Trans., 1991, PWDR-6, pp. 1008-1015
12 DASH, P.K., and PANDA, D.K.: ‘Digital impedance protection of
power transmission lines using a spectral observer’, IEEE Trans.,
1988, PWDR-3, pp. 102-108
7 Appendix
7.1 Discrete representation of symmetrical
0
t 20
//
40 60 80 100
components
According to the general theory of symmetrical com-
time, rns
ponents any asymmetrical three phase vector config-
Fig. 3 Magnitude of estimated symmetrical components uration can be split into three symmetrical systems of
( Three-state observer
I
vectors by the well-known transformation:
b Six-stateobserver
c Full-penod Fourier algorithm
Fobr = T*Fo12 (20)
where Fobc = [Fa F b F,]’ are three-phase system vectors,
FOl2 [Fo F, F21T are symmetrical components, T, is
=
5 Conclusions transformation matrix, and
The time-invariant signal models of symmetrical com-
ponents have been presented. The models were developed
for indirect measurement of the equivalent vector f of a
,
three-phase system. They can be applied in design of state
observers which appear to be good and fast estimators of Any of the vectors in eqn. 20 can be written in the follow-
symmetrical components of power system currents and ing form [11:
voltages and their higher harmonics. Transient and fre-
quency response of such estimators can easily be modi- Fi = Fi exp (j4J (22)
fied by the proper placement of the state observer where Fiis the RMS value of a current or voltage and i
eigenvalues. denotes either a, b, c or 0, 1, 2. The instantaneous value
Thus, as compared with standard nonrecursive algo- of vector F, can be determined from the continuous time
rithms, the state-observer concept seems to be a more function :
convenient and flexible (taking into account the response
time and suppression of the selected signals) tool in the A t ) = J(2)Fi ~ X ( j o t )
P (23)
620 IEE Proc-Gener. Transm. Distrib., Vol. 141, N o . 6 , November 1994](https://image.slidesharecdn.com/00335085-130315060346-phpapp01/85/00335085-4-320.jpg)
![In discrete form this can be expressed as
A(k) =A&) + jfi,(k) (24)
where
fi,(k) =J ( W i cos (ko + 4;)
&(k) = J(2)Fi sin (ku + 4J (25) and the transformed matrix q satisfies the equation
where U = 2n/N, N is the number of samples in one P=A-KR (32)
period T of fundamental frequency, o, = 2 4 0 .
T
Since the assigned numbers sij are also eigenvalues of the
matrix Y it can be written in the following form:
7.2 Determination of observer matrix K for
multioutput time-invariant systems 1
Consider the state observer:
i ( k + 1) =Yf(k) + Ky(k) (26)
where Y = A - K H of the system described by the fol-
lowing signal model:
si, 0 _ ' ' 0 0
x(k + 1 ) = Ax(k)
(33)
y(k)= (27)
... 1 Sin;
where x = B", A = W""",= W f x ny, = W', n = number
H
of states, I = number of outputs of the system, and Examining eqns. 30-33 one can notice that the following
relations can be derived from eqn. 32:
RA=A (34)
, H i = [hi, hi, . . . hi,] (28) in which
1 0 ...
Determination of the observer matrix K to obtain the
required eigenvalues of Y is the basic problem in state
observer design. The solution of this problem for the
observer described in this paper has been reached by (35)
transformation of the matrix A into bidiagonal canonical
form [ S I . Assume that the number of ni states is the nonsingular matrix comprising of I columns of the
I matrix which are denoted by the numbers U , , . . . , U ; ,
Eni=. (29) .. .,u l , (ui = E;=,ni), while
i= 1
...
is assigned to each output of the n-state system (eqn. 27). "f=
As a result, 1 different subsystems are obtained and the
numbers s i j , i = 1, 2, ..., I, j = 1 2, ..., n i , being the
, a,, ' ' _
required eigenvalues of the matrix Y , are assigned to
each of the subsystems. The bidiagonal canonical form of r&,q
the system (eqn. 27) can be determined by the following aij = Id!]
transformation:
(30) is the matrix which contains the lowest row of (Aijor Aij
(eqn. 32). The observer matrix K is related to its trans-
formed form by eqn. 30. Taking into account eqn. 34
A=HP=[A1 A, . . . I?,] finally gives
where K = PR = PAf"' (37)
0 To obtain the transformation matrix P the coefficients ni
must be determined first. The values of these coefficients
0 depend on how the linearly independent rows are sel-
E @ x ni
ected from the following set of vectors 9:
... H I , H , , ..., Hi,H , A , . . , , H IA , H l A 2 ,..., H 1 A n - ' (38)
The method presented of matrix K determination is
correct if the set of n linearly independent vectors t i j ,
i = 1, 2, _ . , I, j = 1, 2, . . ., ni can be selected from the eqn.
38 set. The algorithm used for this purpose is shown
I E E Proc.-Gener. Transm. Distrib., Vol. 141, N o . 6, November 1994 62 1](https://image.slidesharecdn.com/00335085-130315060346-phpapp01/85/00335085-5-320.jpg)
![below. To get its short and terse description the algo- Step I : Using algorithm 1 determine the set of coefi-
rithm is presented as a procedure written in pseudo- cients ni and vectors tij, i = 1,2, . .., I, j = 1,2, ... , n i .
Pascal programming language. Step 2: Construct the square matrix Q:
Algorithm I : Determination of linearly independent
vectors in eqn. 38. (39)
f o r i : = l toIdo
begin
til :=Hi;
n.:= 1 : where
mi := 1
end ;
i:=O;
repeat
+
i : = ( i mod 0 1 ;
i f mi = 1 then Step 3: Determine the inverse of Q and denote its
begin columns by qij:
a := timiA;
k
i f a independentfrom ( t k j , = 1 . . ., I, j = 1 ,
, . . .,n,) then Q-l =C4ii giz ' ' 1 41nl 4 2 1 . ' . 4r.11 (41)
begin
n.:= n. + 1 ;
1 , Step 4: Determine the transformation matrix P which
timi a
:= takes the following form:
end
else mi := 0 p = CPll PlZ " ' Pl", P21 " ' PI",] (42)
end and the vectors p i j are calculated according to the follow-
until ni = n ing procedure:
The auxiliary variable m i , i = 1 , 2, . .., I , is initially set to
mi = 1 . The change of mi (mi = 0) indicates that all
remaining elements of the set (eqn. 38) related to the
vector Hiare linearly dependent and they do not need
p 11 = q. i ,
. m
pij = [ A - S i j - l O p i j - ] 1
i = 1,2, ..., I, j = 2,3, ..., ni (43)
further examination. The final form of the transformation
matrix P can be determined by use of the algorithm If the eqn. 27 system is observable it can be represented
which consists of the following steps: in bidiagonal canonical form (eqn. 30) by use of the trans-
formation matrix P. The observer matrix K can be calcu-
Algorithm 2 : Determination of transformation matrix P lated from eqn. 37.
622 IEE P r o c . - G e m . Transm. Distrib., Vol. I l l , No. 6, Nouember 1994](https://image.slidesharecdn.com/00335085-130315060346-phpapp01/85/00335085-6-320.jpg)