This document outlines a non-parametric approach to analyzing mass-action models and data using techniques from algebraic geometry. It discusses using Gröbner bases to perform variable elimination on dynamical equations describing chemical reaction networks, leaving invariants that must vanish at steady state. These invariants allow testing a model's validity by assessing how well they are satisfied by observed data, providing a way to perform parameter-free model selection and discrimination.






























































![[33], irreversible bistability is achieved, implementing a perma-
nent cell death decision. Thus, our model suggests a primary role
Examples: apoptosis activation
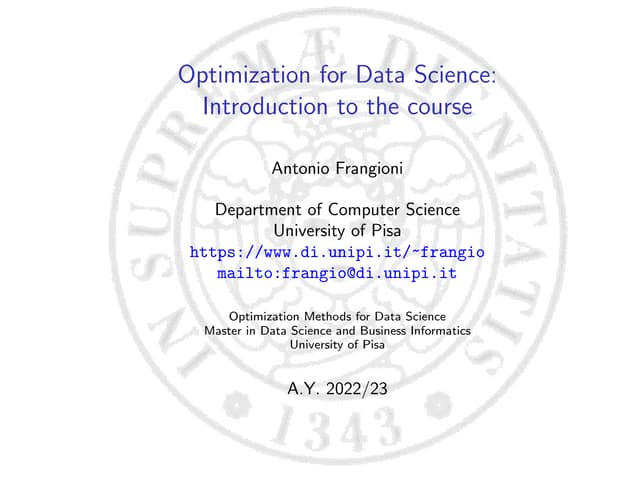
Chapter 7. Fas trimerization model
s for each of the DISC, MAC, and apoptosome modules are described
for death receptors in deciding cell fate. Moreover, our results offer
145 novel functional interpretations of ligand trimerism and receptor
pre-association and localization within the unified context of
The first reaction describes spo
closing; the second, constitutive
third, ligand-independent recept
bistability. fourth, ligand-dependent recepto
The orders of the cluster-stabiliz
tation is understood to apply only within each module.
Results parameters m and n, which captu
and Fas coordination by FasL, r
Model formulation stabilization (m~n~2) has been
Constructing a mathematical model of Fas dynamics is not higher-order analogues, for exam
entirely straightforward as receptors can form highly oligomeric interactions, are not unreasonabl
Crosslinking model Cluster model
!
rization kinetics are simplified from the crosslinking model (Delisi,
4, 1981) of Lai and Jackson, 2004 and follow the reactions
" 3kf !
FasL + FasR −− FasL-FasR,
−−
kr
Figure 1. Cartoon of model interactions. The transmembrane death receptor Fas natively adopts a closed co
2kf the binding of FADD, an adaptor molecule that facilitates apoptotic signal transduction. Open Fas can self-st
FasL-FasR + FasR −− FasL-FasR2 ,
−− interactions, which is enhanced by receptor clustering through association with the ligand FasL.
doi:10.1371/journal.pcbi.1000956.g001
2kr
PLoS Computational Biology | www.ploscompbiol.org 2 October 2010 |
kf
FasL-FasR2 + FasR −− FasL-FasR3 ,
−−
3kr
Lai & Jackson (2004) Math Biosci Eng Figure 2. Schematic of cluster-stabilization reactions. Examples
Ho & Harrington (2010) PLoS Comput Biol
of ligand-independent cluster-stabilization reactions involving unstable
(Y ) and stable (Z) open receptors of molecularities two (A), three (B),
Figure 7.4: Comparison with the crosslinking model. (A) Process diagram (comply with the SBGN Pro-
cess Description language Level 1 (Le Nov` re et al., 2009)) of the crosslinking model. (B) Variation of
e
and four (C). Higher-order reactions follow the same pattern. Ligand-
the steady-state signaling Fas fraction ζ∞ with respect to the model parameter κ. (C) Minimization errors dependent reactions are identical except that FasL (L) must be added
of the steady-state invariants ωH and ωC for the hysteron and crosslinking models, respectively (Ap- to each reacting state.
pendix B.2), over data generated from each model (Datasets 3 and 4) using nonnegative least squares (see doi:10.1371/journal.pcbi.1000956.g002
Materials and methods for details).
Formally, these reactions are to be interpreted as state transitions
Model checking, multistability, and spatial models Heather Harrington 21 / 40
on the space of cluster tuples. However, the reaction notation is](https://image.slidesharecdn.com/mbi-may-2012-120515093410-phpapp02/75/Non-parametric-analysis-of-models-and-data-63-2048.jpg)
![[33], irreversible bistability is achieved, implementing a perma-
nent cell death decision. Thus, our model suggests a primary role
Examples: apoptosis activation
Chapter 7. Fas trimerization model
s for each of the DISC, MAC, and apoptosome modules are described
for death receptors in deciding cell fate. Moreover, our results offer
145 novel functional interpretations of ligand trimerism and receptor
pre-association and localization within the unified context of
The first reaction describes spo
closing; the second, constitutive
third, ligand-independent recept
bistability. fourth, ligand-dependent recepto
The orders of the cluster-stabiliz
tation is understood to apply only within each module.
Results parameters m and n, which captu
and Fas coordination by FasL, r
Model formulation stabilization (m~n~2) has been
Constructing a mathematical model of Fas dynamics is not higher-order analogues, for exam
entirely straightforward as receptors can form highly oligomeric interactions, are not unreasonabl
Crosslinking model Cluster model
!
rization kinetics are simplified from the crosslinking model (Delisi,
4, 1981) of Lai and Jackson, 2004 and follow the reactions
" 3kf !
FasL + FasR −− FasL-FasR,
−−
kr
Figure 1. Cartoon of model interactions. The transmembrane death receptor Fas natively adopts a closed co
2kf the binding of FADD, an adaptor molecule that facilitates apoptotic signal transduction. Open Fas can self-st
FasL-FasR + FasR −− FasL-FasR2 ,
−− interactions, which is enhanced by receptor clustering through association with the ligand FasL.
doi:10.1371/journal.pcbi.1000956.g001
2kr
PLoS Computational Biology | www.ploscompbiol.org 2 October 2010 |
kf
FasL-FasR2 + FasR −− FasL-FasR3 ,
−−
3kr
Lai & Jackson (2004) Math Biosci Eng Figure 2. Schematic of cluster-stabilization reactions. Examples
Ho & Harrington (2010) PLoS Comput Biol
of ligand-independent cluster-stabilization reactions involving unstable
(Y ) and stable (Z) open receptors of molecularities two (A), three (B),
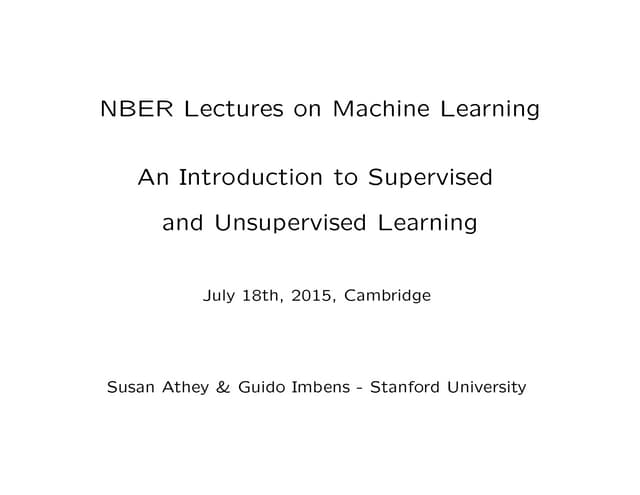
The activation signal is defined for each model.
Figure 7.4: Comparison with the crosslinking model. (A) Process diagram (comply with the SBGN Pro-
cess Description language Level 1 (Le Nov` re et al., 2009)) of the crosslinking model. (B) Variation of
e
and four (C). Higher-order reactions follow the same pattern. Ligand-
dependent reactions are identical except that FasL (L) must be added
the steady-state signaling Fas fraction ζ∞ with respect to the model parameter κ. (C) Minimization errors
of the steady-state invariants ωH and ωC for the hysteron and crosslinking models, respectively (Ap- to each reacting state.
pendix B.2), over data generated from each model (Datasets 3 and 4) using nonnegative least squares (see doi:10.1371/journal.pcbi.1000956.g002
Materials and methods for details).
Formally, these reactions are to be interpreted as state transitions
Model checking, multistability, and spatial models Heather Harrington 21 / 40
on the space of cluster tuples. However, the reaction notation is](https://image.slidesharecdn.com/mbi-may-2012-120515093410-phpapp02/75/Non-parametric-analysis-of-models-and-data-64-2048.jpg)
![[33], irreversible bistability is achieved, implementing a perma-
nent cell death decision. Thus, our model suggests a primary role
Examples: apoptosis activation
Chapter 7. Fas trimerization model
s for each of the DISC, MAC, and apoptosome modules are described
for death receptors in deciding cell fate. Moreover, our results offer
145 novel functional interpretations of ligand trimerism and receptor
pre-association and localization within the unified context of
The first reaction describes spo
closing; the second, constitutive
third, ligand-independent recept
bistability. fourth, ligand-dependent recepto
The orders of the cluster-stabiliz
tation is understood to apply only within each module.
Results parameters m and n, which captu
and Fas coordination by FasL, r
Model formulation stabilization (m~n~2) has been
Constructing a mathematical model of Fas dynamics is not higher-order analogues, for exam
entirely straightforward as receptors can form highly oligomeric interactions, are not unreasonabl
Crosslinking model Cluster model
!
rization kinetics are simplified from the crosslinking model (Delisi,
4, 1981) of Lai and Jackson, 2004 and follow the reactions
" 3kf !
FasL + FasR −− FasL-FasR,
−−
kr
Figure 1. Cartoon of model interactions. The transmembrane death receptor Fas natively adopts a closed co
2kf the binding of FADD, an adaptor molecule that facilitates apoptotic signal transduction. Open Fas can self-st
FasL-FasR + FasR −− FasL-FasR2 ,
−− interactions, which is enhanced by receptor clustering through association with the ligand FasL.
doi:10.1371/journal.pcbi.1000956.g001
2kr
PLoS Computational Biology | www.ploscompbiol.org 2 October 2010 |
kf
FasL-FasR2 + FasR −− FasL-FasR3 ,
−−
3kr
Lai & Jackson (2004) Math Biosci Eng Figure 2. Schematic of cluster-stabilization reactions. Examples
Ho & Harrington (2010) PLoS Comput Biol
of ligand-independent cluster-stabilization reactions involving unstable
(Y ) and stable (Z) open receptors of molecularities two (A), three (B),
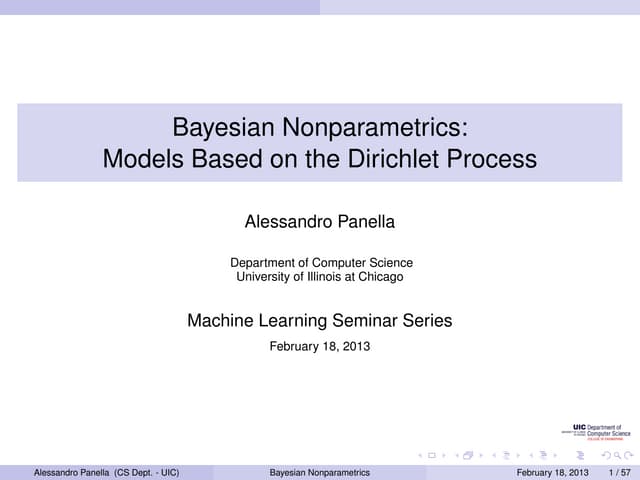
The activation signal is defined for each model.
Figure 7.4: Comparison with the crosslinking model. (A) Process diagram (comply with the SBGN Pro-
cess Description language Level 1 (Le Nov` re et al., 2009)) of the crosslinking model. (B) Variation of
e
and four (C). Higher-order reactions follow the same pattern. Ligand-
dependent reactions are identical except that FasL (L) must be added
the steady-state signaling Fas fraction ζ∞ with respect to the model parameter κ. (C) Minimization errors
of the steady-state invariants ωH and ωC for the hysteron and crosslinking models, respectively (Ap- to each reacting state.
Each model has one steady-state invariant.
pendix B.2), over data generated from each model (Datasets 3 and 4) using nonnegative least squares (see
Materials and methods for details).
doi:10.1371/journal.pcbi.1000956.g002
Formally, these reactions are to be interpreted as state transitions
Model checking, multistability, and spatial models Heather Harrington 21 / 40
on the space of cluster tuples. However, the reaction notation is](https://image.slidesharecdn.com/mbi-may-2012-120515093410-phpapp02/75/Non-parametric-analysis-of-models-and-data-65-2048.jpg)

















![E
X
One-site model
E X
S S⇤
F
Y
Nucleus Cytoplasm
F
Y
Plasma
membrane S S*
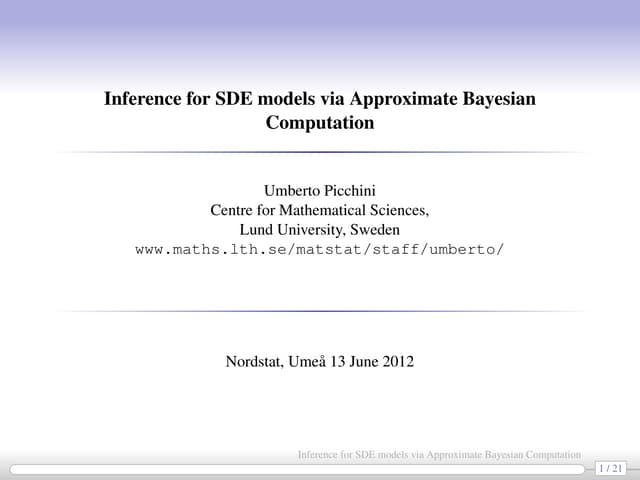
Figure 1: Shuttling of a one-site phosphorylation cycle between the nucleus and the cytoplasm.
X
2 Shuttling in a one-site phosphorylation cycle E
2.1 Reactions
Cytoplasm
E
We consider a one-site phosphorylation cycle with species: S, S ⇤ (the unphosphorylated and phospho-
rylated substrates), E (kinase), F (phosphatase), and X, Y (intermediate complexes). Phosphorylation
X
and dephosphorylation are assumed to follow a Michaelis-Menten mechanism (see below and main
S
text). This motif cannot admit multiple steady states, and it is monostable [4]. S*
To study the effect of compartmentalization, we asume that the species S, S ⇤ , E, X can shuttle
Y
between the cytoplasm and the nucleus (see Figure 1). We let Z c denote species Z in the Fcytoplasm.
Nucleus
Then, the reactions in play are as follows: Nucleus
• Reactions in the nucleus:
k1 k3 k4 k6
E+S o / / ⇤ ⇤ / /
Figure X Spatial signaling schematic. + S
1: E + S F +S Y F o
k 2 k 5
• Reactions in the cytoplasm:
k7 k9 k10 k12
Ec + Sc o / / Ec + Sc F c + S c⇤ o / / F c + S c⇤
Xc Yc
k8 k11
• Shuttling reactions:
k13 k14 k15 k16
/ / / /
Eo Ec Xo Xc So Sc S⇤ o S c⇤
k17 k18 k19 k20
To ease the notation below, we have changed the notation of the reaction constants k⇤ in the main
Model checking, multistability, and spatial models Heather Harrington 28 / 40](https://image.slidesharecdn.com/mbi-may-2012-120515093410-phpapp02/75/Non-parametric-analysis-of-models-and-data-83-2048.jpg)






![Necessary conditions for monostability
X E
S S⇤
F
Y
Nucleus
By inspection of these two expressions, we conclude that
multistationarity1:cannot aoccur in any cycle the followingthe cytoplasm.
Figure Shuttling of one-site phosphorylation of between the nucleus and cases:
2 Shuttling in ak19 , kphosphorylation cycle 15 ,
(i) k20 ≤ one-site 18 ≥ k17 , k16 ≤ k k14 ≥ k13 ,
2.1 (ii) k
Reactions
20 ≥ k19 , k18 ≥ k17 , k16 ≤ k15 , k14 ≤ k13 ,
We consider a one-site phosphorylation cycle with species: S, S ⇤ (the unphosphorylated and phospho-
(iii) k20 ≤(kinase), F (phosphatase), and X, Y16 ≥ k15 , complexes). Phosphorylation
rylated substrates), E k19 , k18 ≤ k17 , k (intermediate k14 ≥ k13 ,
and dephosphorylation are assumed to follow a Michaelis-Menten mechanism (see below and main
text). This motif cannotk19 , multiple steady states, and 16 ≥ k15 , [4]. 14 ≤ k13 .
(iv) k20 ≥ admit k18 ≤ k17 , k it is monostable k
To study the effect of compartmentalization, we asume that the species S, S ⇤ , E, X can shuttle
between the cytoplasm and the nucleus (see Figure 1). We let Z c denote species Z in the cytoplasm.
Then, the reactions in play are as follows:
• Reactions in the nucleus:
k1 k3 k4 k6
E+S o / / E + S⇤ F + S⇤ o / /F +S
X Y
k2 k5
• Reactions in the cytoplasm:
k7 k9 k10 k12
Ec + Sc o / / Ec + Sc F c + S c⇤ o / / F c + S c⇤
Xc Yc
k8 k11
• Shuttling reactions:
k13 k14 k15 k16
/ / / /
Eo Ec Xo Xc So Sc S⇤ o S c⇤
k17 k18 k19 k20
To ease the notation below, we have changed the notation of the reaction constants k⇤ in the main
Model checking, multistability, and spatial models Heather Harrington 31 / 40](https://image.slidesharecdn.com/mbi-may-2012-120515093410-phpapp02/75/Non-parametric-analysis-of-models-and-data-90-2048.jpg)
![E
X
Necessary conditions for monostability
E X
S S⇤
F
Y
By inspection of these two expressions, we conclude that
Nucleus
multistationarity cannot occur in any of the following cases:
Figure 1: Shuttling of a one-site phosphorylation cycle between the nucleus and the cytoplasm.
(i) k20 ≤ k19 , k18 ≥ k17 , k16 ≤ k15 , k14 ≥ k13 ,
2 (ii) k20 in ak19 , kphosphorylation cycle 15 ,
Shuttling ≥ one-site 18 ≥ k17 , k16 ≤ k k14 ≤ k13 ,
2.1 Reactions
(iii) k20 ≤ k19 , k18 ≤ k17 , k16 ≥ k15 , k14 ≥ k13 ,
We consider a one-site phosphorylation cycle with species: S, S ⇤ (the unphosphorylated and phospho-
rylated substrates), ≥(kinase), F (phosphatase), and X, Y (intermediate complexes). Phosphorylation
(iv) k20 E k19 , k18 ≤ k17 , k16 ≥ k15 , k14 ≤ k13 .
and dephosphorylation are assumed to follow a Michaelis-Menten mechanism (see below and main
text). This motif cannot admit multiple steady states, and it is monostable [4].
Note that these only involve the rate constants for the shuttling
To study the effect of compartmentalization, we asume that the species S, S ⇤ , E, X can shuttle
between the cytoplasm and the nucleus (see Figure 1). We let Z c denote species Z in the cytoplasm.
reactions. Then, the reactions in play are as follows:
• Reactions in the nucleus:
k1 k3 k4 k6
E+S o / / E + S⇤ F + S⇤ o / /F +S
X Y
k2 k5
• Reactions in the cytoplasm:
k7 k9 k10 k12
Ec + Sc o / / Ec + Sc F c + S c⇤ o / / F c + S c⇤
Xc Yc
k8 k11
• Shuttling reactions:
k13 k14 k15 k16
/ / / /
Eo Ec Xo Xc So Sc S⇤ o S c⇤
k17 k18 k19 k20
To ease the notation below, we have changed the notation of the reaction constants k⇤ in the main
Model checking, multistability, and spatial models Heather Harrington 31 / 40](https://image.slidesharecdn.com/mbi-may-2012-120515093410-phpapp02/75/Non-parametric-analysis-of-models-and-data-91-2048.jpg)























![Gr¨bner Bases
o
Manrai & Gunawardena procedure:
Let Q[a] be the polynomial ring consisting of all polynomials in the
parameters a = (k1 , . . . , kR ) with coefficients from the rational
numbers Q.
Let K be its fraction field, comprising all elements of the form f /g ,
where f , g ∈ Q[a].
Clearly, each xi ∈ K[x], the ring of all polynomials in
˙
x = (x1 , . . . , xN ) with coefficients in K.
Note that the parameters a have been absorbed into the coefficient
field K.
By performing all operations over K, we can treat a symbolically,
i.e., without specifying any particular parameter values.
Model checking, multistability, and spatial models Heather Harrington 40 / 40](https://image.slidesharecdn.com/mbi-may-2012-120515093410-phpapp02/75/Non-parametric-analysis-of-models-and-data-115-2048.jpg)
![Characterize Steady State
To characterize the steady state (x = 0):
˙
Construct the ideal J = x generated by x, consisting of all
˙ ˙
polynomials N fi xi , where each fi ∈ K[x].
i=1 ˙
Clearly, J contains all elements of K[x] that vanish at steady state.
To obtain only those elements of J that do not depend on the
variables x1 , . . . , xi , we consider the ith elimination ideal
Ji = J ∩ K[xobs ], where xobs = (xi+1 , . . . , xN ) denotes the
“observable” variables.
Use Gr¨bner bases, which are special sets of generators with the
o
so-called elimination property that if g = (g1 , . . . , gM ) is a Gr¨bner
o
basis for J under the lexicographic ordering x1 > · · · > xN , then
Ji = gobs , where gobs = g ∩ K[xobs ] are precisely those elements
of g containing only the variables xobs .
The polynomials gobs generate all elements of K[xobs ] that vanish
at steady state and so characterize the projection of the steady
state onto the variables xobs .
Model checking, multistability, and spatial models Heather Harrington 40 / 40](https://image.slidesharecdn.com/mbi-may-2012-120515093410-phpapp02/75/Non-parametric-analysis-of-models-and-data-116-2048.jpg)





































![The Green Lab - [09 A] Statistical tests and effect size](https://cdn.slidesharecdn.com/ss_thumbnails/09-astatisticaltestsandeffectsize-161108211828-thumbnail.jpg?width=640&height=640&fit=bounds)