Download as PDF, PPTX







![On approximating Bayes factors
Introduction
Bayes factor
Bayes factor
Definition (Bayes factors)
For comparing model M0 with θ ∈ Θ0 vs. M1 with θ ∈ Θ1 , under
priors π0 (θ) and π1 (θ), central quantity
f0 (x|θ0 )π0 (θ0 )dθ0
π(Θ0 |x) π(Θ0 ) Θ0
B01 = =
π(Θ1 |x) π(Θ1 )
f1 (x|θ)π1 (θ1 )dθ1
Θ1
[Jeffreys, 1939]](https://image.slidesharecdn.com/warwox-100530021332-phpapp01/85/Approximating-Bayes-Factors-9-320.jpg)
![On approximating Bayes factors
Introduction
Evidence
Evidence
Problems using a similar quantity, the evidence
Zk = πk (θk )Lk (θk ) dθk ,
Θk
aka the marginal likelihood.
[Jeffreys, 1939]](https://image.slidesharecdn.com/warwox-100530021332-phpapp01/85/Approximating-Bayes-Factors-10-320.jpg)
![On approximating Bayes factors
Importance sampling solutions compared
A comparison of importance sampling solutions
1 Introduction
2 Importance sampling solutions compared
Regular importance
Bridge sampling
Harmonic means
Mixtures to bridge
Chib’s solution
The Savage–Dickey ratio
3 Nested sampling
[Marin & Robert, 2010]](https://image.slidesharecdn.com/warwox-100530021332-phpapp01/85/Approximating-Bayes-Factors-11-320.jpg)


![On approximating Bayes factors
Importance sampling solutions compared
Regular importance
Probit modelling on Pima Indian women
Probability of diabetes function of above variables
P(y = 1|x) = Φ(x1 β1 + x2 β2 + x3 β3 ) ,
Test of H0 : β3 = 0 for 200 observations of Pima.tr based on a
g-prior modelling:
β ∼ N3 (0, n XT X)−1
[Marin & Robert, 2007]](https://image.slidesharecdn.com/warwox-100530021332-phpapp01/85/Approximating-Bayes-Factors-14-320.jpg)
![On approximating Bayes factors
Importance sampling solutions compared
Regular importance
Probit modelling on Pima Indian women
Probability of diabetes function of above variables
P(y = 1|x) = Φ(x1 β1 + x2 β2 + x3 β3 ) ,
Test of H0 : β3 = 0 for 200 observations of Pima.tr based on a
g-prior modelling:
β ∼ N3 (0, n XT X)−1
[Marin & Robert, 2007]](https://image.slidesharecdn.com/warwox-100530021332-phpapp01/85/Approximating-Bayes-Factors-15-320.jpg)
![On approximating Bayes factors
Importance sampling solutions compared
Regular importance
MCMC 101 for probit models
Use of either a random walk proposal
β =β+
in a Metropolis-Hastings algorithm (since the likelihood is
available) or of a Gibbs sampler that takes advantage of the
missing/latent variable
z|y, x, β ∼ N (xT β, 1) Iy × I1−y
z≥0 z≤0
(since β|y, X, z is distributed as a standard normal)
[Gibbs three times faster]](https://image.slidesharecdn.com/warwox-100530021332-phpapp01/85/Approximating-Bayes-Factors-16-320.jpg)
![On approximating Bayes factors
Importance sampling solutions compared
Regular importance
MCMC 101 for probit models
Use of either a random walk proposal
β =β+
in a Metropolis-Hastings algorithm (since the likelihood is
available) or of a Gibbs sampler that takes advantage of the
missing/latent variable
z|y, x, β ∼ N (xT β, 1) Iy × I1−y
z≥0 z≤0
(since β|y, X, z is distributed as a standard normal)
[Gibbs three times faster]](https://image.slidesharecdn.com/warwox-100530021332-phpapp01/85/Approximating-Bayes-Factors-17-320.jpg)
![On approximating Bayes factors
Importance sampling solutions compared
Regular importance
MCMC 101 for probit models
Use of either a random walk proposal
β =β+
in a Metropolis-Hastings algorithm (since the likelihood is
available) or of a Gibbs sampler that takes advantage of the
missing/latent variable
z|y, x, β ∼ N (xT β, 1) Iy × I1−y
z≥0 z≤0
(since β|y, X, z is distributed as a standard normal)
[Gibbs three times faster]](https://image.slidesharecdn.com/warwox-100530021332-phpapp01/85/Approximating-Bayes-Factors-18-320.jpg)
![On approximating Bayes factors
Importance sampling solutions compared
Regular importance
Importance sampling for the Pima Indian dataset
Use of the importance function inspired from the MLE estimate
distribution
ˆ ˆ
β ∼ N (β, Σ)
R Importance sampling code
model1=summary(glm(y~-1+X1,family=binomial(link="probit")))
is1=rmvnorm(Niter,mean=model1$coeff[,1],sigma=2*model1$cov.unscaled)
is2=rmvnorm(Niter,mean=model2$coeff[,1],sigma=2*model2$cov.unscaled)
bfis=mean(exp(probitlpost(is1,y,X1)-dmvlnorm(is1,mean=model1$coeff[,1],
sigma=2*model1$cov.unscaled))) / mean(exp(probitlpost(is2,y,X2)-
dmvlnorm(is2,mean=model2$coeff[,1],sigma=2*model2$cov.unscaled)))](https://image.slidesharecdn.com/warwox-100530021332-phpapp01/85/Approximating-Bayes-Factors-19-320.jpg)
![On approximating Bayes factors
Importance sampling solutions compared
Regular importance
Importance sampling for the Pima Indian dataset
Use of the importance function inspired from the MLE estimate
distribution
ˆ ˆ
β ∼ N (β, Σ)
R Importance sampling code
model1=summary(glm(y~-1+X1,family=binomial(link="probit")))
is1=rmvnorm(Niter,mean=model1$coeff[,1],sigma=2*model1$cov.unscaled)
is2=rmvnorm(Niter,mean=model2$coeff[,1],sigma=2*model2$cov.unscaled)
bfis=mean(exp(probitlpost(is1,y,X1)-dmvlnorm(is1,mean=model1$coeff[,1],
sigma=2*model1$cov.unscaled))) / mean(exp(probitlpost(is2,y,X2)-
dmvlnorm(is2,mean=model2$coeff[,1],sigma=2*model2$cov.unscaled)))](https://image.slidesharecdn.com/warwox-100530021332-phpapp01/85/Approximating-Bayes-Factors-20-320.jpg)

![On approximating Bayes factors
Importance sampling solutions compared
Bridge sampling
Bridge sampling
Special case:
If
π1 (θ1 |x) ∝ π1 (θ1 |x)
˜
π2 (θ2 |x) ∝ π2 (θ2 |x)
˜
live on the same space (Θ1 = Θ2 ), then
n
1 π1 (θi |x)
˜
B12 ≈ θi ∼ π2 (θ|x)
n π2 (θi |x)
˜
i=1
[Gelman & Meng, 1998; Chen, Shao & Ibrahim, 2000]](https://image.slidesharecdn.com/warwox-100530021332-phpapp01/85/Approximating-Bayes-Factors-22-320.jpg)




![On approximating Bayes factors
Importance sampling solutions compared
Bridge sampling
Optimal bridge sampling (2)
Reason:
Var(B12 ) 1 π1 (θ)π2 (θ)[n1 π1 (θ) + n2 π2 (θ)]α(θ)2 dθ
2 ≈ 2 −1
B12 n1 n2 π1 (θ)π2 (θ)α(θ) dθ
(by the δ method)
Drawback: Dependence on the unknown normalising constants
solved iteratively](https://image.slidesharecdn.com/warwox-100530021332-phpapp01/85/Approximating-Bayes-Factors-27-320.jpg)
![On approximating Bayes factors
Importance sampling solutions compared
Bridge sampling
Optimal bridge sampling (2)
Reason:
Var(B12 ) 1 π1 (θ)π2 (θ)[n1 π1 (θ) + n2 π2 (θ)]α(θ)2 dθ
2 ≈ 2 −1
B12 n1 n2 π1 (θ)π2 (θ)α(θ) dθ
(by the δ method)
Drawback: Dependence on the unknown normalising constants
solved iteratively](https://image.slidesharecdn.com/warwox-100530021332-phpapp01/85/Approximating-Bayes-Factors-28-320.jpg)
![On approximating Bayes factors
Importance sampling solutions compared
Bridge sampling
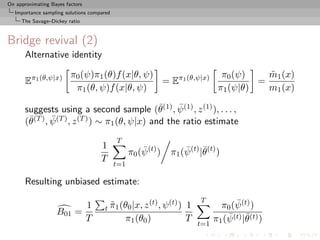
Extension to varying dimensions
When dim(Θ1 ) = dim(Θ2 ), e.g. θ2 = (θ1 , ψ), introduction of a
pseudo-posterior density, ω(ψ|θ1 , x), augmenting π1 (θ1 |x) into
joint distribution
π1 (θ1 |x) × ω(ψ|θ1 , x)
on Θ2 so that
π1 (θ1 |x)α(θ1 , ψ)π2 (θ1 , ψ|x)dθ1 ω(ψ|θ1 , x) dψ
˜
B12 =
π2 (θ1 , ψ|x)α(θ1 , ψ)π1 (θ1 |x)dθ1 ω(ψ|θ1 , x) dψ
˜
π1 (θ1 )ω(ψ|θ1 )
˜ Eϕ [˜1 (θ1 )ω(ψ|θ1 )/ϕ(θ1 , ψ)]
π
= Eπ2 =
π2 (θ1 , ψ)
˜ Eϕ [˜2 (θ1 , ψ)/ϕ(θ1 , ψ)]
π
for any conditional density ω(ψ|θ1 ) and any joint density ϕ.](https://image.slidesharecdn.com/warwox-100530021332-phpapp01/85/Approximating-Bayes-Factors-29-320.jpg)
![On approximating Bayes factors
Importance sampling solutions compared
Bridge sampling
Extension to varying dimensions
When dim(Θ1 ) = dim(Θ2 ), e.g. θ2 = (θ1 , ψ), introduction of a
pseudo-posterior density, ω(ψ|θ1 , x), augmenting π1 (θ1 |x) into
joint distribution
π1 (θ1 |x) × ω(ψ|θ1 , x)
on Θ2 so that
π1 (θ1 |x)α(θ1 , ψ)π2 (θ1 , ψ|x)dθ1 ω(ψ|θ1 , x) dψ
˜
B12 =
π2 (θ1 , ψ|x)α(θ1 , ψ)π1 (θ1 |x)dθ1 ω(ψ|θ1 , x) dψ
˜
π1 (θ1 )ω(ψ|θ1 )
˜ Eϕ [˜1 (θ1 )ω(ψ|θ1 )/ϕ(θ1 , ψ)]
π
= Eπ2 =
π2 (θ1 , ψ)
˜ Eϕ [˜2 (θ1 , ψ)/ϕ(θ1 , ψ)]
π
for any conditional density ω(ψ|θ1 ) and any joint density ϕ.](https://image.slidesharecdn.com/warwox-100530021332-phpapp01/85/Approximating-Bayes-Factors-30-320.jpg)
![On approximating Bayes factors
Importance sampling solutions compared
Bridge sampling
Illustration for the Pima Indian dataset
Use of the MLE induced conditional of β3 given (β1 , β2 ) as a
pseudo-posterior and mixture of both MLE approximations on β3
in bridge sampling estimate
R bridge sampling code
cova=model2$cov.unscaled
expecta=model2$coeff[,1]
covw=cova[3,3]-t(cova[1:2,3])%*%ginv(cova[1:2,1:2])%*%cova[1:2,3]
probit1=hmprobit(Niter,y,X1)
probit2=hmprobit(Niter,y,X2)
pseudo=rnorm(Niter,meanw(probit1),sqrt(covw))
probit1p=cbind(probit1,pseudo)
bfbs=mean(exp(probitlpost(probit2[,1:2],y,X1)+dnorm(probit2[,3],meanw(probit2[,1:2]),
sqrt(covw),log=T))/ (dmvnorm(probit2,expecta,cova)+dnorm(probit2[,3],expecta[3],
cova[3,3])))/ mean(exp(probitlpost(probit1p,y,X2))/(dmvnorm(probit1p,expecta,cova)+
dnorm(pseudo,expecta[3],cova[3,3])))](https://image.slidesharecdn.com/warwox-100530021332-phpapp01/85/Approximating-Bayes-Factors-31-320.jpg)
![On approximating Bayes factors
Importance sampling solutions compared
Bridge sampling
Illustration for the Pima Indian dataset
Use of the MLE induced conditional of β3 given (β1 , β2 ) as a
pseudo-posterior and mixture of both MLE approximations on β3
in bridge sampling estimate
R bridge sampling code
cova=model2$cov.unscaled
expecta=model2$coeff[,1]
covw=cova[3,3]-t(cova[1:2,3])%*%ginv(cova[1:2,1:2])%*%cova[1:2,3]
probit1=hmprobit(Niter,y,X1)
probit2=hmprobit(Niter,y,X2)
pseudo=rnorm(Niter,meanw(probit1),sqrt(covw))
probit1p=cbind(probit1,pseudo)
bfbs=mean(exp(probitlpost(probit2[,1:2],y,X1)+dnorm(probit2[,3],meanw(probit2[,1:2]),
sqrt(covw),log=T))/ (dmvnorm(probit2,expecta,cova)+dnorm(probit2[,3],expecta[3],
cova[3,3])))/ mean(exp(probitlpost(probit1p,y,X2))/(dmvnorm(probit1p,expecta,cova)+
dnorm(pseudo,expecta[3],cova[3,3])))](https://image.slidesharecdn.com/warwox-100530021332-phpapp01/85/Approximating-Bayes-Factors-32-320.jpg)

![On approximating Bayes factors
Importance sampling solutions compared
Harmonic means
The original harmonic mean estimator
When θki ∼ πk (θ|x),
T
1 1
T L(θkt |x)
t=1
is an unbiased estimator of 1/mk (x)
[Newton & Raftery, 1994]
Highly dangerous: Most often leads to an infinite variance!!!](https://image.slidesharecdn.com/warwox-100530021332-phpapp01/85/Approximating-Bayes-Factors-34-320.jpg)
![On approximating Bayes factors
Importance sampling solutions compared
Harmonic means
The original harmonic mean estimator
When θki ∼ πk (θ|x),
T
1 1
T L(θkt |x)
t=1
is an unbiased estimator of 1/mk (x)
[Newton & Raftery, 1994]
Highly dangerous: Most often leads to an infinite variance!!!](https://image.slidesharecdn.com/warwox-100530021332-phpapp01/85/Approximating-Bayes-Factors-35-320.jpg)
![On approximating Bayes factors
Importance sampling solutions compared
Harmonic means
“The Worst Monte Carlo Method Ever”
“The good news is that the Law of Large Numbers guarantees that
this estimator is consistent ie, it will very likely be very close to the
correct answer if you use a sufficiently large number of points from
the posterior distribution.
The bad news is that the number of points required for this
estimator to get close to the right answer will often be greater
than the number of atoms in the observable universe. The even
worse news is that it’s easy for people to not realize this, and to
na¨ıvely accept estimates that are nowhere close to the correct
value of the marginal likelihood.”
[Radford Neal’s blog, Aug. 23, 2008]](https://image.slidesharecdn.com/warwox-100530021332-phpapp01/85/Approximating-Bayes-Factors-36-320.jpg)
![On approximating Bayes factors
Importance sampling solutions compared
Harmonic means
“The Worst Monte Carlo Method Ever”
“The good news is that the Law of Large Numbers guarantees that
this estimator is consistent ie, it will very likely be very close to the
correct answer if you use a sufficiently large number of points from
the posterior distribution.
The bad news is that the number of points required for this
estimator to get close to the right answer will often be greater
than the number of atoms in the observable universe. The even
worse news is that it’s easy for people to not realize this, and to
na¨ıvely accept estimates that are nowhere close to the correct
value of the marginal likelihood.”
[Radford Neal’s blog, Aug. 23, 2008]](https://image.slidesharecdn.com/warwox-100530021332-phpapp01/85/Approximating-Bayes-Factors-37-320.jpg)
![On approximating Bayes factors
Importance sampling solutions compared
Harmonic means
Approximating Zk from a posterior sample
Use of the [harmonic mean] identity
ϕ(θk ) ϕ(θk ) πk (θk )Lk (θk ) 1
Eπk x = dθk =
πk (θk )Lk (θk ) πk (θk )Lk (θk ) Zk Zk
no matter what the proposal ϕ(·) is.
[Gelfand & Dey, 1994; Bartolucci et al., 2006]
Direct exploitation of the MCMC output](https://image.slidesharecdn.com/warwox-100530021332-phpapp01/85/Approximating-Bayes-Factors-38-320.jpg)
![On approximating Bayes factors
Importance sampling solutions compared
Harmonic means
Approximating Zk from a posterior sample
Use of the [harmonic mean] identity
ϕ(θk ) ϕ(θk ) πk (θk )Lk (θk ) 1
Eπk x = dθk =
πk (θk )Lk (θk ) πk (θk )Lk (θk ) Zk Zk
no matter what the proposal ϕ(·) is.
[Gelfand & Dey, 1994; Bartolucci et al., 2006]
Direct exploitation of the MCMC output](https://image.slidesharecdn.com/warwox-100530021332-phpapp01/85/Approximating-Bayes-Factors-39-320.jpg)




![On approximating Bayes factors
Importance sampling solutions compared
Mixtures to bridge
Approximating Zk using a mixture representation
Bridge sampling redux
Design a specific mixture for simulation [importance sampling]
purposes, with density
ϕk (θk ) ∝ ω1 πk (θk )Lk (θk ) + ϕ(θk ) ,
where ϕ(·) is arbitrary (but normalised)
Note: ω1 is not a probability weight
[Chopin & Robert, 2010]](https://image.slidesharecdn.com/warwox-100530021332-phpapp01/85/Approximating-Bayes-Factors-45-320.jpg)
![On approximating Bayes factors
Importance sampling solutions compared
Mixtures to bridge
Approximating Zk using a mixture representation
Bridge sampling redux
Design a specific mixture for simulation [importance sampling]
purposes, with density
ϕk (θk ) ∝ ω1 πk (θk )Lk (θk ) + ϕ(θk ) ,
where ϕ(·) is arbitrary (but normalised)
Note: ω1 is not a probability weight
[Chopin & Robert, 2010]](https://image.slidesharecdn.com/warwox-100530021332-phpapp01/85/Approximating-Bayes-Factors-46-320.jpg)



![On approximating Bayes factors
Importance sampling solutions compared
Mixtures to bridge
Evidence approximation by mixtures
Rao-Blackwellised estimate
T
ˆ 1
ξ=
(t) (t)
ω1 πk (θk )Lk (θk )
(t) (t)
ω1 πk (θk )Lk (θk ) + ϕ(θk ) ,
(t)
T
t=1
converges to ω1 Zk /{ω1 Zk + 1}
3k
ˆ ˆ ˆ
Deduce Zˆ from ω1 Z3k /{ω1 Z3k + 1} = ξ ie
T (t) (t) (t) (t) (t)
t=1 ω1 πk (θk )Lk (θk ) ω1 π(θk )Lk (θk ) + ϕ(θk )
ˆ
Z3k =
T (t) (t) (t) (t)
t=1 ϕ(θk ) ω1 πk (θk )Lk (θk ) + ϕ(θk )
[Bridge sampler]](https://image.slidesharecdn.com/warwox-100530021332-phpapp01/85/Approximating-Bayes-Factors-50-320.jpg)
![On approximating Bayes factors
Importance sampling solutions compared
Mixtures to bridge
Evidence approximation by mixtures
Rao-Blackwellised estimate
T
ˆ 1
ξ=
(t) (t)
ω1 πk (θk )Lk (θk )
(t) (t)
ω1 πk (θk )Lk (θk ) + ϕ(θk ) ,
(t)
T
t=1
converges to ω1 Zk /{ω1 Zk + 1}
3k
ˆ ˆ ˆ
Deduce Zˆ from ω1 Z3k /{ω1 Z3k + 1} = ξ ie
T (t) (t) (t) (t) (t)
t=1 ω1 πk (θk )Lk (θk ) ω1 π(θk )Lk (θk ) + ϕ(θk )
ˆ
Z3k =
T (t) (t) (t) (t)
t=1 ϕ(θk ) ω1 πk (θk )Lk (θk ) + ϕ(θk )
[Bridge sampler]](https://image.slidesharecdn.com/warwox-100530021332-phpapp01/85/Approximating-Bayes-Factors-51-320.jpg)



![On approximating Bayes factors
Importance sampling solutions compared
Chib’s solution
Label switching
A mixture model [special case of missing variable model] is
invariant under permutations of the indices of the components.
E.g., mixtures
0.3N (0, 1) + 0.7N (2.3, 1)
and
0.7N (2.3, 1) + 0.3N (0, 1)
are exactly the same!
c The component parameters θi are not identifiable
marginally since they are exchangeable](https://image.slidesharecdn.com/warwox-100530021332-phpapp01/85/Approximating-Bayes-Factors-55-320.jpg)
![On approximating Bayes factors
Importance sampling solutions compared
Chib’s solution
Label switching
A mixture model [special case of missing variable model] is
invariant under permutations of the indices of the components.
E.g., mixtures
0.3N (0, 1) + 0.7N (2.3, 1)
and
0.7N (2.3, 1) + 0.3N (0, 1)
are exactly the same!
c The component parameters θi are not identifiable
marginally since they are exchangeable](https://image.slidesharecdn.com/warwox-100530021332-phpapp01/85/Approximating-Bayes-Factors-56-320.jpg)
![On approximating Bayes factors
Importance sampling solutions compared
Chib’s solution
Connected difficulties
1 Number of modes of the likelihood of order O(k!):
c Maximization and even [MCMC] exploration of the
posterior surface harder
2 Under exchangeable priors on (θ, p) [prior invariant under
permutation of the indices], all posterior marginals are
identical:
c Posterior expectation of θ1 equal to posterior expectation
of θ2](https://image.slidesharecdn.com/warwox-100530021332-phpapp01/85/Approximating-Bayes-Factors-57-320.jpg)
![On approximating Bayes factors
Importance sampling solutions compared
Chib’s solution
Connected difficulties
1 Number of modes of the likelihood of order O(k!):
c Maximization and even [MCMC] exploration of the
posterior surface harder
2 Under exchangeable priors on (θ, p) [prior invariant under
permutation of the indices], all posterior marginals are
identical:
c Posterior expectation of θ1 equal to posterior expectation
of θ2](https://image.slidesharecdn.com/warwox-100530021332-phpapp01/85/Approximating-Bayes-Factors-58-320.jpg)

![On approximating Bayes factors
Importance sampling solutions compared
Chib’s solution
Label switching paradox
We should observe the exchangeability of the components [label
switching] to conclude about convergence of the Gibbs sampler.
If we observe it, then we do not know how to estimate the
parameters.
If we do not, then we are uncertain about the convergence!!!](https://image.slidesharecdn.com/warwox-100530021332-phpapp01/85/Approximating-Bayes-Factors-60-320.jpg)
![On approximating Bayes factors
Importance sampling solutions compared
Chib’s solution
Label switching paradox
We should observe the exchangeability of the components [label
switching] to conclude about convergence of the Gibbs sampler.
If we observe it, then we do not know how to estimate the
parameters.
If we do not, then we are uncertain about the convergence!!!](https://image.slidesharecdn.com/warwox-100530021332-phpapp01/85/Approximating-Bayes-Factors-61-320.jpg)
![On approximating Bayes factors
Importance sampling solutions compared
Chib’s solution
Label switching paradox
We should observe the exchangeability of the components [label
switching] to conclude about convergence of the Gibbs sampler.
If we observe it, then we do not know how to estimate the
parameters.
If we do not, then we are uncertain about the convergence!!!](https://image.slidesharecdn.com/warwox-100530021332-phpapp01/85/Approximating-Bayes-Factors-62-320.jpg)
![On approximating Bayes factors
Importance sampling solutions compared
Chib’s solution
Compensation for label switching
(t)
For mixture models, zk usually fails to visit all configurations in a
balanced way, despite the symmetry predicted by the theory
1
πk (θk |x) = πk (σ(θk )|x) = πk (σ(θk )|x)
k!
σ∈S
for all σ’s in Sk , set of all permutations of {1, . . . , k}.
Consequences on numerical approximation, biased by an order k!
Recover the theoretical symmetry by using
T
∗ 1 ∗ (t)
πk (θk |x) = πk (σ(θk )|x, zk ) .
T k!
σ∈Sk t=1
[Berkhof, Mechelen, & Gelman, 2003]](https://image.slidesharecdn.com/warwox-100530021332-phpapp01/85/Approximating-Bayes-Factors-63-320.jpg)
![On approximating Bayes factors
Importance sampling solutions compared
Chib’s solution
Compensation for label switching
(t)
For mixture models, zk usually fails to visit all configurations in a
balanced way, despite the symmetry predicted by the theory
1
πk (θk |x) = πk (σ(θk )|x) = πk (σ(θk )|x)
k!
σ∈S
for all σ’s in Sk , set of all permutations of {1, . . . , k}.
Consequences on numerical approximation, biased by an order k!
Recover the theoretical symmetry by using
T
∗ 1 ∗ (t)
πk (θk |x) = πk (σ(θk )|x, zk ) .
T k!
σ∈Sk t=1
[Berkhof, Mechelen, & Gelman, 2003]](https://image.slidesharecdn.com/warwox-100530021332-phpapp01/85/Approximating-Bayes-Factors-64-320.jpg)
![On approximating Bayes factors
Importance sampling solutions compared
Chib’s solution
Galaxy dataset
n = 82 galaxies as a mixture of k normal distributions with both
mean and variance unknown.
[Roeder, 1992]
Average density
0.8
0.6
Relative Frequency
0.4
0.2
0.0
−2 −1 0 1 2 3
data](https://image.slidesharecdn.com/warwox-100530021332-phpapp01/85/Approximating-Bayes-Factors-65-320.jpg)
![On approximating Bayes factors
Importance sampling solutions compared
Chib’s solution
Galaxy dataset (k)
∗
Using only the original estimate, with θk as the MAP estimator,
log(mk (x)) = −105.1396
ˆ
for k = 3 (based on 103 simulations), while introducing the
permutations leads to
log(mk (x)) = −103.3479
ˆ
Note that
−105.1396 + log(3!) = −103.3479
k 2 3 4 5 6 7 8
mk (x) -115.68 -103.35 -102.66 -101.93 -102.88 -105.48 -108.44
Estimations of the marginal likelihoods by the symmetrised Chib’s
approximation (based on 105 Gibbs iterations and, for k > 5, 100
permutations selected at random in Sk ).
[Lee, Marin, Mengersen & Robert, 2008]](https://image.slidesharecdn.com/warwox-100530021332-phpapp01/85/Approximating-Bayes-Factors-66-320.jpg)
![On approximating Bayes factors
Importance sampling solutions compared
Chib’s solution
Galaxy dataset (k)
∗
Using only the original estimate, with θk as the MAP estimator,
log(mk (x)) = −105.1396
ˆ
for k = 3 (based on 103 simulations), while introducing the
permutations leads to
log(mk (x)) = −103.3479
ˆ
Note that
−105.1396 + log(3!) = −103.3479
k 2 3 4 5 6 7 8
mk (x) -115.68 -103.35 -102.66 -101.93 -102.88 -105.48 -108.44
Estimations of the marginal likelihoods by the symmetrised Chib’s
approximation (based on 105 Gibbs iterations and, for k > 5, 100
permutations selected at random in Sk ).
[Lee, Marin, Mengersen & Robert, 2008]](https://image.slidesharecdn.com/warwox-100530021332-phpapp01/85/Approximating-Bayes-Factors-67-320.jpg)
![On approximating Bayes factors
Importance sampling solutions compared
Chib’s solution
Galaxy dataset (k)
∗
Using only the original estimate, with θk as the MAP estimator,
log(mk (x)) = −105.1396
ˆ
for k = 3 (based on 103 simulations), while introducing the
permutations leads to
log(mk (x)) = −103.3479
ˆ
Note that
−105.1396 + log(3!) = −103.3479
k 2 3 4 5 6 7 8
mk (x) -115.68 -103.35 -102.66 -101.93 -102.88 -105.48 -108.44
Estimations of the marginal likelihoods by the symmetrised Chib’s
approximation (based on 105 Gibbs iterations and, for k > 5, 100
permutations selected at random in Sk ).
[Lee, Marin, Mengersen & Robert, 2008]](https://image.slidesharecdn.com/warwox-100530021332-phpapp01/85/Approximating-Bayes-Factors-68-320.jpg)
![On approximating Bayes factors
Importance sampling solutions compared
Chib’s solution
Case of the probit model
For the completion by z,
1
π (θ|x) =
ˆ π(θ|x, z (t) )
T t
is a simple average of normal densities
R Bridge sampling code
gibbs1=gibbsprobit(Niter,y,X1)
gibbs2=gibbsprobit(Niter,y,X2)
bfchi=mean(exp(dmvlnorm(t(t(gibbs2$mu)-model2$coeff[,1]),mean=rep(0,3),
sigma=gibbs2$Sigma2)-probitlpost(model2$coeff[,1],y,X2)))/
mean(exp(dmvlnorm(t(t(gibbs1$mu)-model1$coeff[,1]),mean=rep(0,2),
sigma=gibbs1$Sigma2)-probitlpost(model1$coeff[,1],y,X1)))](https://image.slidesharecdn.com/warwox-100530021332-phpapp01/85/Approximating-Bayes-Factors-69-320.jpg)
![On approximating Bayes factors
Importance sampling solutions compared
Chib’s solution
Case of the probit model
For the completion by z,
1
π (θ|x) =
ˆ π(θ|x, z (t) )
T t
is a simple average of normal densities
R Bridge sampling code
gibbs1=gibbsprobit(Niter,y,X1)
gibbs2=gibbsprobit(Niter,y,X2)
bfchi=mean(exp(dmvlnorm(t(t(gibbs2$mu)-model2$coeff[,1]),mean=rep(0,3),
sigma=gibbs2$Sigma2)-probitlpost(model2$coeff[,1],y,X2)))/
mean(exp(dmvlnorm(t(t(gibbs1$mu)-model1$coeff[,1]),mean=rep(0,2),
sigma=gibbs1$Sigma2)-probitlpost(model1$coeff[,1],y,X1)))](https://image.slidesharecdn.com/warwox-100530021332-phpapp01/85/Approximating-Bayes-Factors-70-320.jpg)

![On approximating Bayes factors
Importance sampling solutions compared
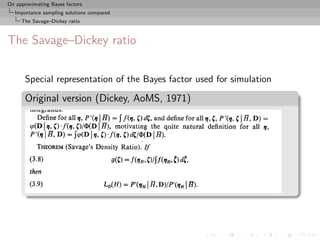
The Savage–Dickey ratio
Savage’s density ratio theorem
Given a test H0 : θ = θ0 in a model f (x|θ, ψ) with a nuisance
parameter ψ, under priors π0 (ψ) and π1 (θ, ψ) such that
π1 (ψ|θ0 ) = π0 (ψ)
then
π1 (θ0 |x)
B01 = ,
π1 (θ0 )
with the obvious notations
π1 (θ) = π1 (θ, ψ)dψ , π1 (θ|x) = π1 (θ, ψ|x)dψ ,
[Dickey, 1971; Verdinelli & Wasserman, 1995]](https://image.slidesharecdn.com/warwox-100530021332-phpapp01/85/Approximating-Bayes-Factors-73-320.jpg)
![On approximating Bayes factors
Importance sampling solutions compared
The Savage–Dickey ratio
Rephrased
“Suppose that f0 (θ) = f1 (θ|φ = φ0 ). As f0 (x|θ) = f1 (x|θ, φ = φ0 ),
Z
f0 (x) = f1 (x|θ, φ = φ0 )f1 (θ|φ = φ0 ) dθ = f1 (x|φ = φ0 ) ,
i.e., the denumerator of the Bayes factor is the value of f1 (x|φ) at φ = φ0 , while the denominator is an average
of the values of f1 (x|φ) for φ = φ0 , weighted by the prior distribution f1 (φ) under the augmented model.
Applying Bayes’ theorem to the right-hand side of [the above] we get
‹
f0 (x) = f1 (φ0 |x)f1 (x) f1 (φ0 )
and hence the Bayes factor is given by
‹ ‹
B = f0 (x) f1 (x) = f1 (φ0 |x) f1 (φ0 ) .
the ratio of the posterior to prior densities at φ = φ0 under the augmented model.”
[O’Hagan & Forster, 1996]](https://image.slidesharecdn.com/warwox-100530021332-phpapp01/85/Approximating-Bayes-Factors-74-320.jpg)
![On approximating Bayes factors
Importance sampling solutions compared
The Savage–Dickey ratio
Rephrased
“Suppose that f0 (θ) = f1 (θ|φ = φ0 ). As f0 (x|θ) = f1 (x|θ, φ = φ0 ),
Z
f0 (x) = f1 (x|θ, φ = φ0 )f1 (θ|φ = φ0 ) dθ = f1 (x|φ = φ0 ) ,
i.e., the denumerator of the Bayes factor is the value of f1 (x|φ) at φ = φ0 , while the denominator is an average
of the values of f1 (x|φ) for φ = φ0 , weighted by the prior distribution f1 (φ) under the augmented model.
Applying Bayes’ theorem to the right-hand side of [the above] we get
‹
f0 (x) = f1 (φ0 |x)f1 (x) f1 (φ0 )
and hence the Bayes factor is given by
‹ ‹
B = f0 (x) f1 (x) = f1 (φ0 |x) f1 (φ0 ) .
the ratio of the posterior to prior densities at φ = φ0 under the augmented model.”
[O’Hagan & Forster, 1996]](https://image.slidesharecdn.com/warwox-100530021332-phpapp01/85/Approximating-Bayes-Factors-75-320.jpg)
![On approximating Bayes factors
Importance sampling solutions compared
The Savage–Dickey ratio
Measure-theoretic difficulty
Representation depends on the choice of versions of conditional
densities:
π0 (ψ)f (x|θ0 , ψ) dψ
B01 = [by definition]
π1 (θ, ψ)f (x|θ, ψ) dψdθ
π1 (ψ|θ0 )f (x|θ0 , ψ) dψ π1 (θ0 )
= [specific version of π1 (ψ|θ0 )
π1 (θ, ψ)f (x|θ, ψ) dψdθ π1 (θ0 )
and arbitrary version of π1 (θ0 )]
π1 (θ0 , ψ)f (x|θ0 , ψ) dψ
= [specific version of π1 (θ0 , ψ)]
m1 (x)π1 (θ0 )
π1 (θ0 |x)
= [version dependent]
π1 (θ0 )](https://image.slidesharecdn.com/warwox-100530021332-phpapp01/85/Approximating-Bayes-Factors-76-320.jpg)
![On approximating Bayes factors
Importance sampling solutions compared
The Savage–Dickey ratio
Measure-theoretic difficulty
Representation depends on the choice of versions of conditional
densities:
π0 (ψ)f (x|θ0 , ψ) dψ
B01 = [by definition]
π1 (θ, ψ)f (x|θ, ψ) dψdθ
π1 (ψ|θ0 )f (x|θ0 , ψ) dψ π1 (θ0 )
= [specific version of π1 (ψ|θ0 )
π1 (θ, ψ)f (x|θ, ψ) dψdθ π1 (θ0 )
and arbitrary version of π1 (θ0 )]
π1 (θ0 , ψ)f (x|θ0 , ψ) dψ
= [specific version of π1 (θ0 , ψ)]
m1 (x)π1 (θ0 )
π1 (θ0 |x)
= [version dependent]
π1 (θ0 )](https://image.slidesharecdn.com/warwox-100530021332-phpapp01/85/Approximating-Bayes-Factors-77-320.jpg)


![On approximating Bayes factors
Importance sampling solutions compared
The Savage–Dickey ratio
Savage–Dickey paradox
Verdinelli-Wasserman extension:
π1 (θ0 |x) π1 (ψ|x,θ0 ,x) π0 (ψ)
B01 = E
π1 (θ0 ) π1 (ψ|θ0 )
similarly depends on choices of versions...
...but Monte Carlo implementation relies on specific versions of all
densities without making mention of it
[Chen, Shao & Ibrahim, 2000]](https://image.slidesharecdn.com/warwox-100530021332-phpapp01/85/Approximating-Bayes-Factors-80-320.jpg)
![On approximating Bayes factors
Importance sampling solutions compared
The Savage–Dickey ratio
Savage–Dickey paradox
Verdinelli-Wasserman extension:
π1 (θ0 |x) π1 (ψ|x,θ0 ,x) π0 (ψ)
B01 = E
π1 (θ0 ) π1 (ψ|θ0 )
similarly depends on choices of versions...
...but Monte Carlo implementation relies on specific versions of all
densities without making mention of it
[Chen, Shao & Ibrahim, 2000]](https://image.slidesharecdn.com/warwox-100530021332-phpapp01/85/Approximating-Bayes-Factors-81-320.jpg)












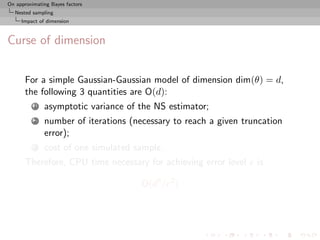
![On approximating Bayes factors
Nested sampling
Properties of nested sampling
1 Introduction
2 Importance sampling solutions compared
3 Nested sampling
Purpose
Implementation
Error rates
Impact of dimension
Constraints
Importance variant
A mixture comparison
[Chopin & Robert, 2010]](https://image.slidesharecdn.com/warwox-100530021332-phpapp01/85/Approximating-Bayes-Factors-95-320.jpg)
![On approximating Bayes factors
Nested sampling
Purpose
Nested sampling: Goal
Skilling’s (2007) technique using the one-dimensional
representation:
1
Z = Eπ [L(θ)] = ϕ(x) dx
0
with
ϕ−1 (l) = P π (L(θ) > l).
Note; ϕ(·) is intractable in most cases.](https://image.slidesharecdn.com/warwox-100530021332-phpapp01/85/Approximating-Bayes-Factors-96-320.jpg)
![On approximating Bayes factors
Nested sampling
Implementation
Nested sampling: First approximation
Approximate Z by a Riemann sum:
j
Z= (xi−1 − xi )ϕ(xi )
i=1
where the xi ’s are either:
deterministic: xi = e−i/N
or random:
x0 = 1, xi+1 = ti xi , ti ∼ Be(N, 1)
so that E[log xi ] = −i/N .](https://image.slidesharecdn.com/warwox-100530021332-phpapp01/85/Approximating-Bayes-Factors-97-320.jpg)







![On approximating Bayes factors
Nested sampling
Error rates
Approximation error
Error = Z − Z
j 1
= (xi−1 − xi )ϕi − ϕ(x) dx = − ϕ(x) dx
i=1 0 0
j 1
+ (xi−1 − xi )ϕ(xi ) − ϕ(x) dx (Quadrature Error)
i=1
j
+ (xi−1 − xi ) {ϕi − ϕ(xi )} (Stochastic Error)
i=1
[Dominated by Monte Carlo!]](https://image.slidesharecdn.com/warwox-100530021332-phpapp01/85/Approximating-Bayes-Factors-105-320.jpg)
![On approximating Bayes factors
Nested sampling
Error rates
A CLT for the Stochastic Error
The (dominating) stochastic error is OP (N −1/2 ):
D
N 1/2 {Stochastic Error} → N (0, V )
with
V =− sϕ (s)tϕ (t) log(s ∨ t) ds dt.
s,t∈[ ,1]
[Proof based on Donsker’s theorem]
The number of simulated points equals the number of iterations j,
and is a multiple of N : if one stops at first iteration j such that
e−j/N < , then: j = N − log .](https://image.slidesharecdn.com/warwox-100530021332-phpapp01/85/Approximating-Bayes-Factors-106-320.jpg)
![On approximating Bayes factors
Nested sampling
Error rates
A CLT for the Stochastic Error
The (dominating) stochastic error is OP (N −1/2 ):
D
N 1/2 {Stochastic Error} → N (0, V )
with
V =− sϕ (s)tϕ (t) log(s ∨ t) ds dt.
s,t∈[ ,1]
[Proof based on Donsker’s theorem]
The number of simulated points equals the number of iterations j,
and is a multiple of N : if one stops at first iteration j such that
e−j/N < , then: j = N − log .](https://image.slidesharecdn.com/warwox-100530021332-phpapp01/85/Approximating-Bayes-Factors-107-320.jpg)



![On approximating Bayes factors
Nested sampling
Constraints
Sampling from constr’d priors
Exact simulation from the constrained prior is intractable in most
cases!
Skilling (2007) proposes to use MCMC, but:
this introduces a bias (stopping rule).
if MCMC stationary distribution is unconst’d prior, more and
more difficult to sample points such that L(θ) > l as l
increases.
If implementable, then slice sampler can be devised at the same
cost!
[Thanks, Gareth!]](https://image.slidesharecdn.com/warwox-100530021332-phpapp01/85/Approximating-Bayes-Factors-112-320.jpg)
![On approximating Bayes factors
Nested sampling
Constraints
Sampling from constr’d priors
Exact simulation from the constrained prior is intractable in most
cases!
Skilling (2007) proposes to use MCMC, but:
this introduces a bias (stopping rule).
if MCMC stationary distribution is unconst’d prior, more and
more difficult to sample points such that L(θ) > l as l
increases.
If implementable, then slice sampler can be devised at the same
cost!
[Thanks, Gareth!]](https://image.slidesharecdn.com/warwox-100530021332-phpapp01/85/Approximating-Bayes-Factors-113-320.jpg)
![On approximating Bayes factors
Nested sampling
Constraints
Sampling from constr’d priors
Exact simulation from the constrained prior is intractable in most
cases!
Skilling (2007) proposes to use MCMC, but:
this introduces a bias (stopping rule).
if MCMC stationary distribution is unconst’d prior, more and
more difficult to sample points such that L(θ) > l as l
increases.
If implementable, then slice sampler can be devised at the same
cost!
[Thanks, Gareth!]](https://image.slidesharecdn.com/warwox-100530021332-phpapp01/85/Approximating-Bayes-Factors-114-320.jpg)










![On approximating Bayes factors
Nested sampling
A mixture comparison
Comparison (cont’d)
Nested sampling gets less reliable as sample size increases
Most reliable approach is mixture Z3 although harmonic solution
Z1 close to Chib’s solution [taken as golden standard]
Monte Carlo method Z2 also producing poor approximations to Z
(Kernel φ used in Z2 is a t non-parametric kernel estimate with
standard bandwidth estimation.)](https://image.slidesharecdn.com/warwox-100530021332-phpapp01/85/Approximating-Bayes-Factors-125-320.jpg)

This document discusses various importance sampling methods for approximating Bayes factors, which are used for Bayesian model selection. It compares regular importance sampling, bridge sampling, harmonic means, mixtures to bridge sampling, and Chib's solution. An example application to probit modeling of diabetes in Pima Indian women is presented to illustrate regular importance sampling. Markov chain Monte Carlo methods like the Metropolis-Hastings algorithm and Gibbs sampling can be used to sample from the probit models.

























![Inference in generative models using the Wasserstein distance [[INI]](https://cdn.slidesharecdn.com/ss_thumbnails/inewton-170706120746-thumbnail.jpg?width=640&height=640&fit=bounds)





















![Columbia workshop [ABC model choice]](https://cdn.slidesharecdn.com/ss_thumbnails/columbia-110924060002-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)