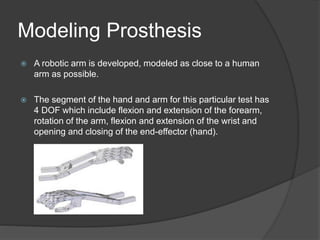
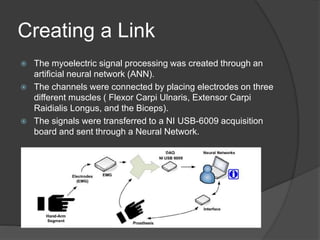
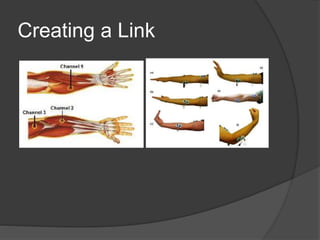
This document discusses using computational intelligence and biomedical engineering to help people with disabilities perform daily tasks through prosthetics. It describes a robotic arm modeled after a human arm with 4 degrees of freedom. Electrode signals from 3 arm muscles are processed through an artificial neural network and used to control the arm positions through inverse kinematics equations. The system was able to stimulate movement of the neuro-prosthetic arm but with less accuracy than a natural human arm.
![Inverse Kinematics
X = L1 cos(theta1) + L2 cos(theta1+theta2)
Y = L1 sin(theta1) + L2 sin(theta1+theta2)
Theta2 = arccos[(X^2 + Y^2 – L1^2 – L2^2)/ 2* L1^2 *L2^2]
Theta1 = arctan(Y/X) – arctan[(L2 sin(Theta2))/ L1 * L2cos(Theta2)]](https://image.slidesharecdn.com/b9a2bc8c-857c-4e75-9c8b-666f83e6b1dd-160616215800/85/NEUROPROSTHETICS-7-320.jpg)






























![The Future of ETFs [INFOGRAPHIC]](https://cdn.slidesharecdn.com/ss_thumbnails/pwc-etfs-infographic-160223160952-thumbnail.jpg?width=640&height=640&fit=bounds)

































