Download as PDF, PPTX


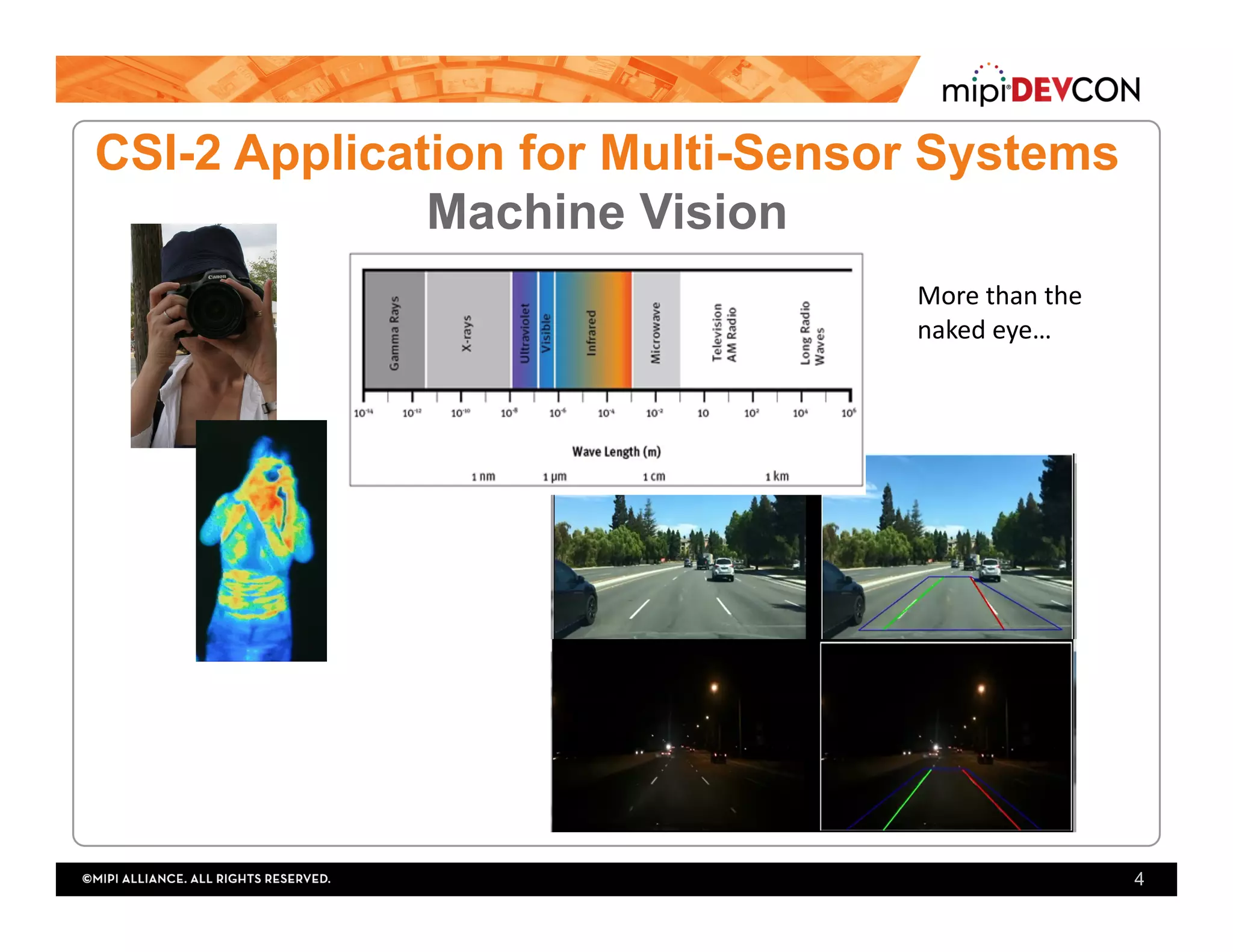
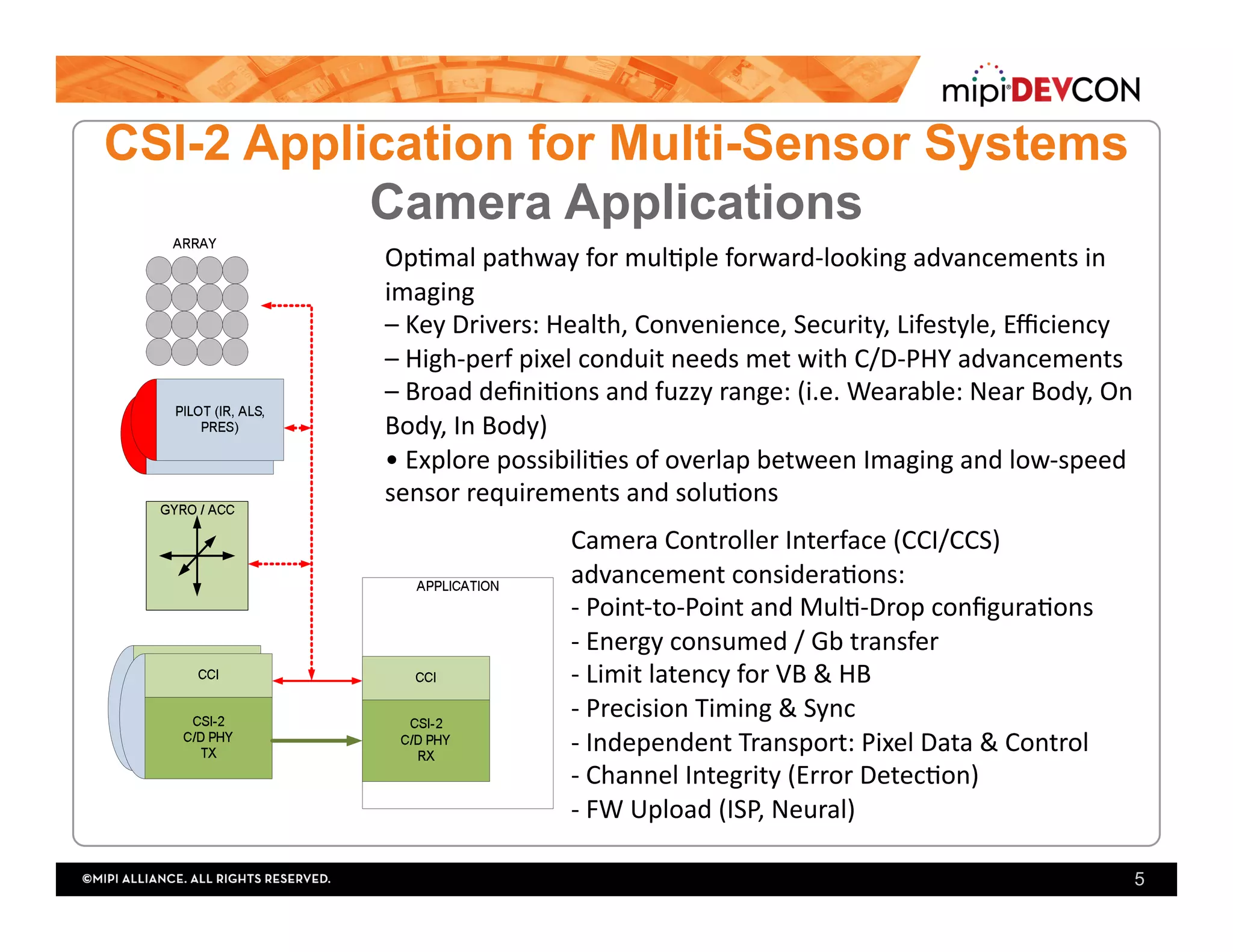
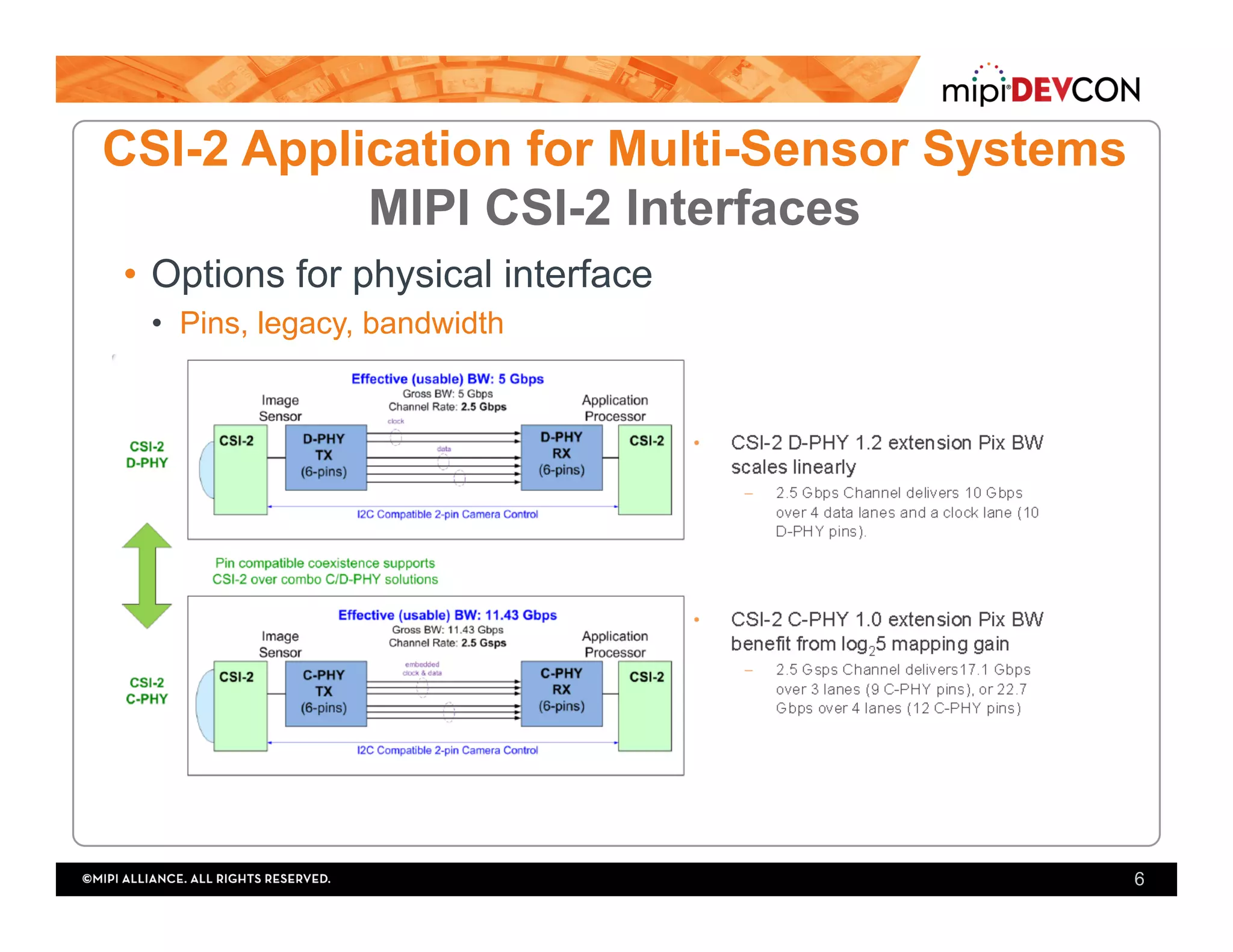
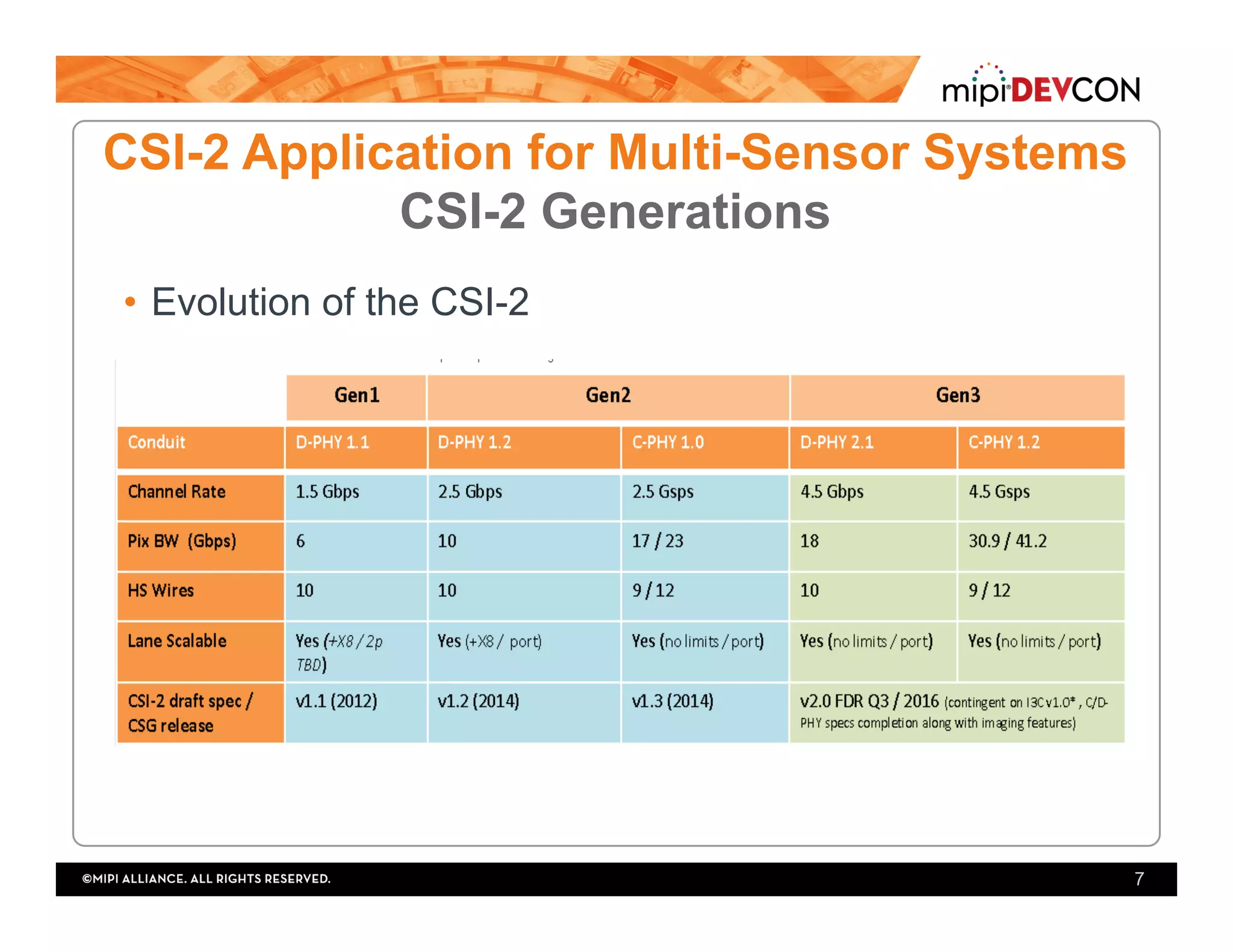
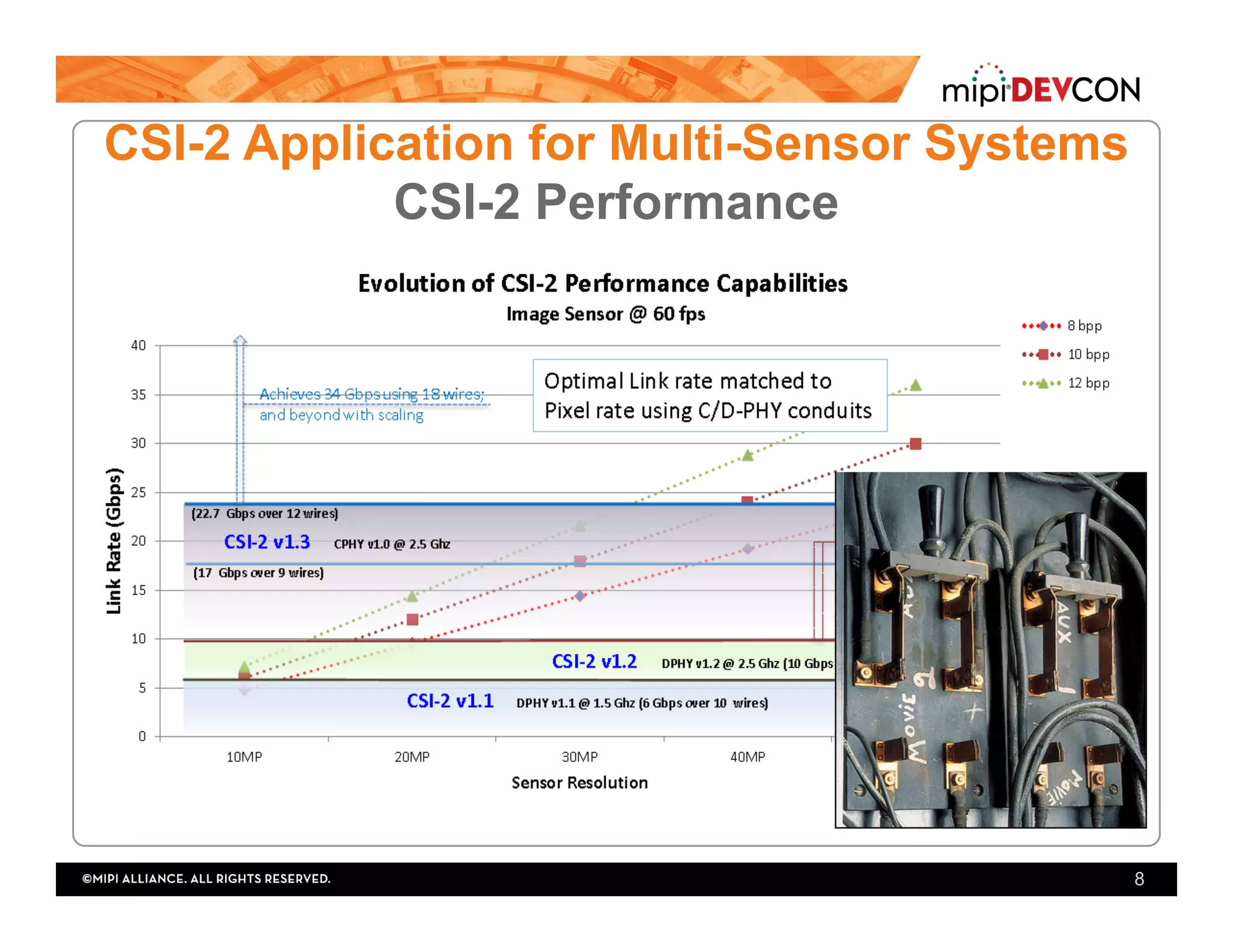
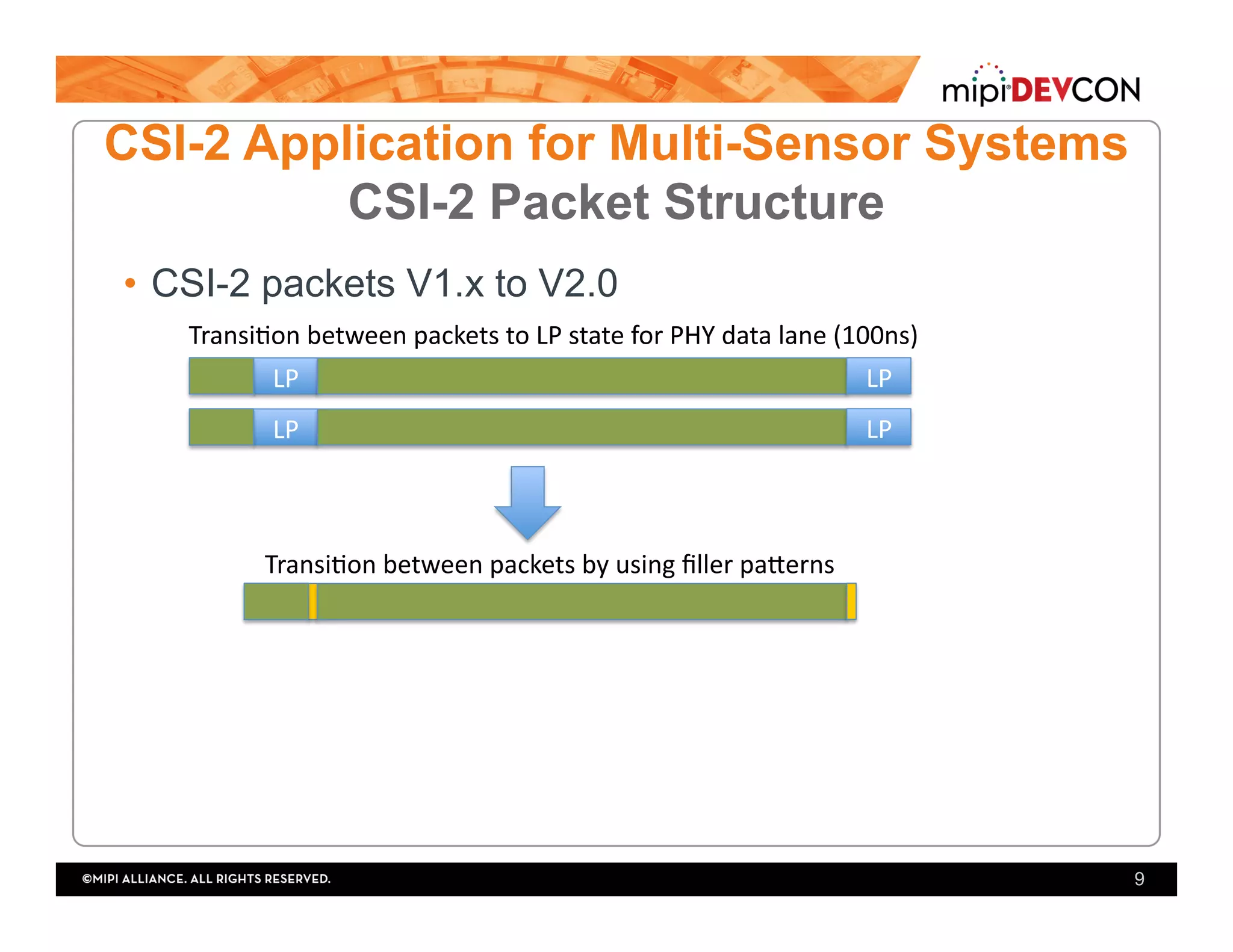
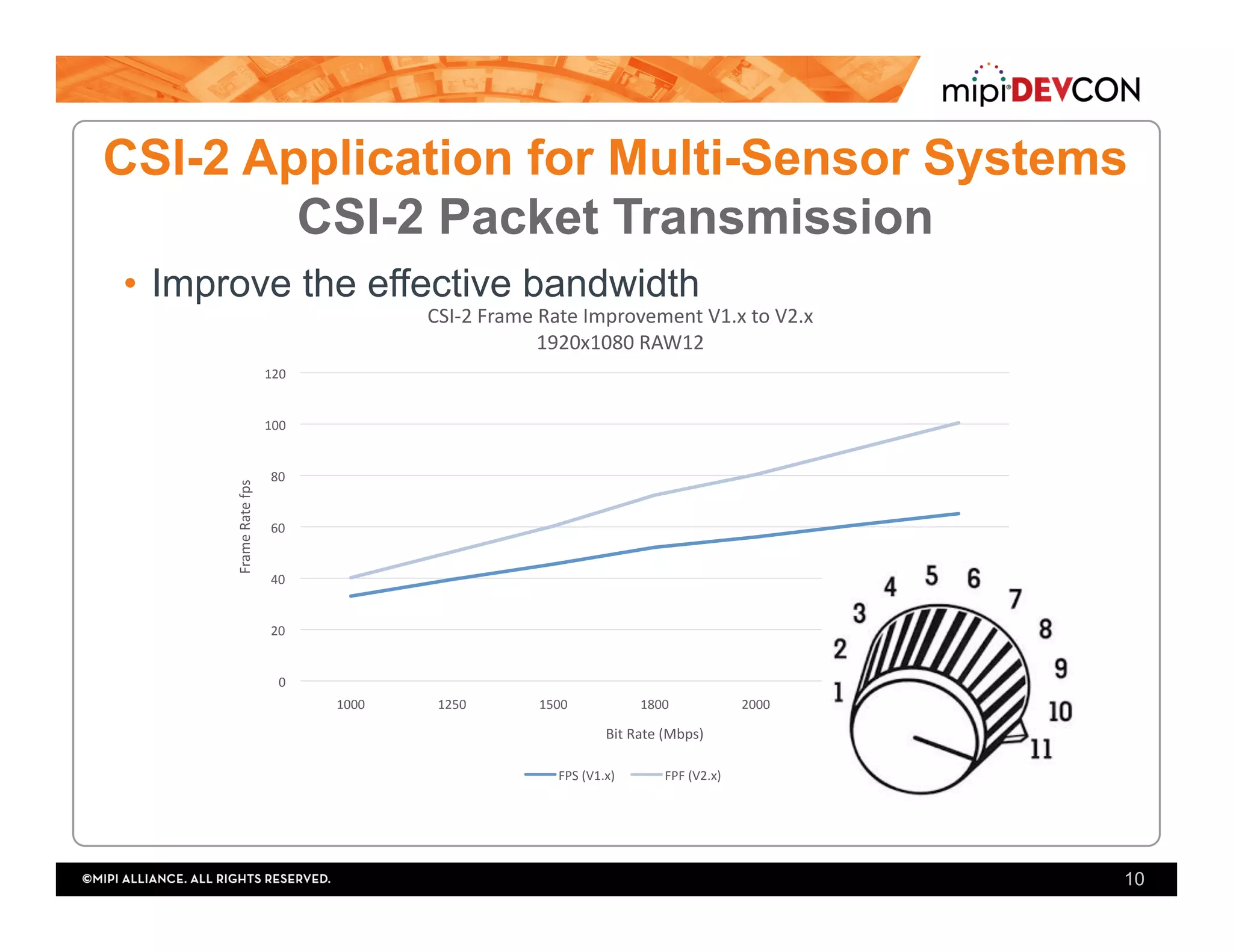
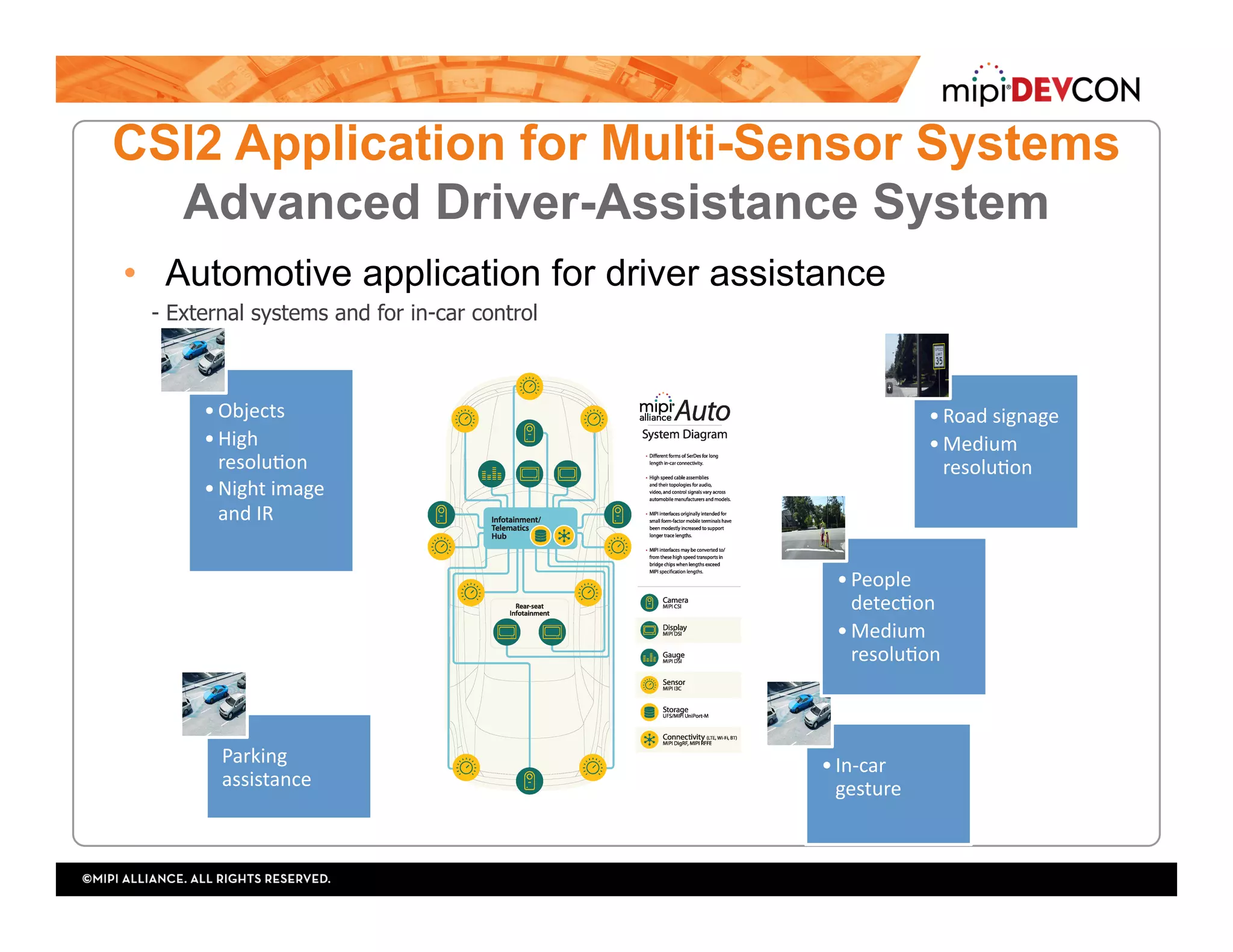
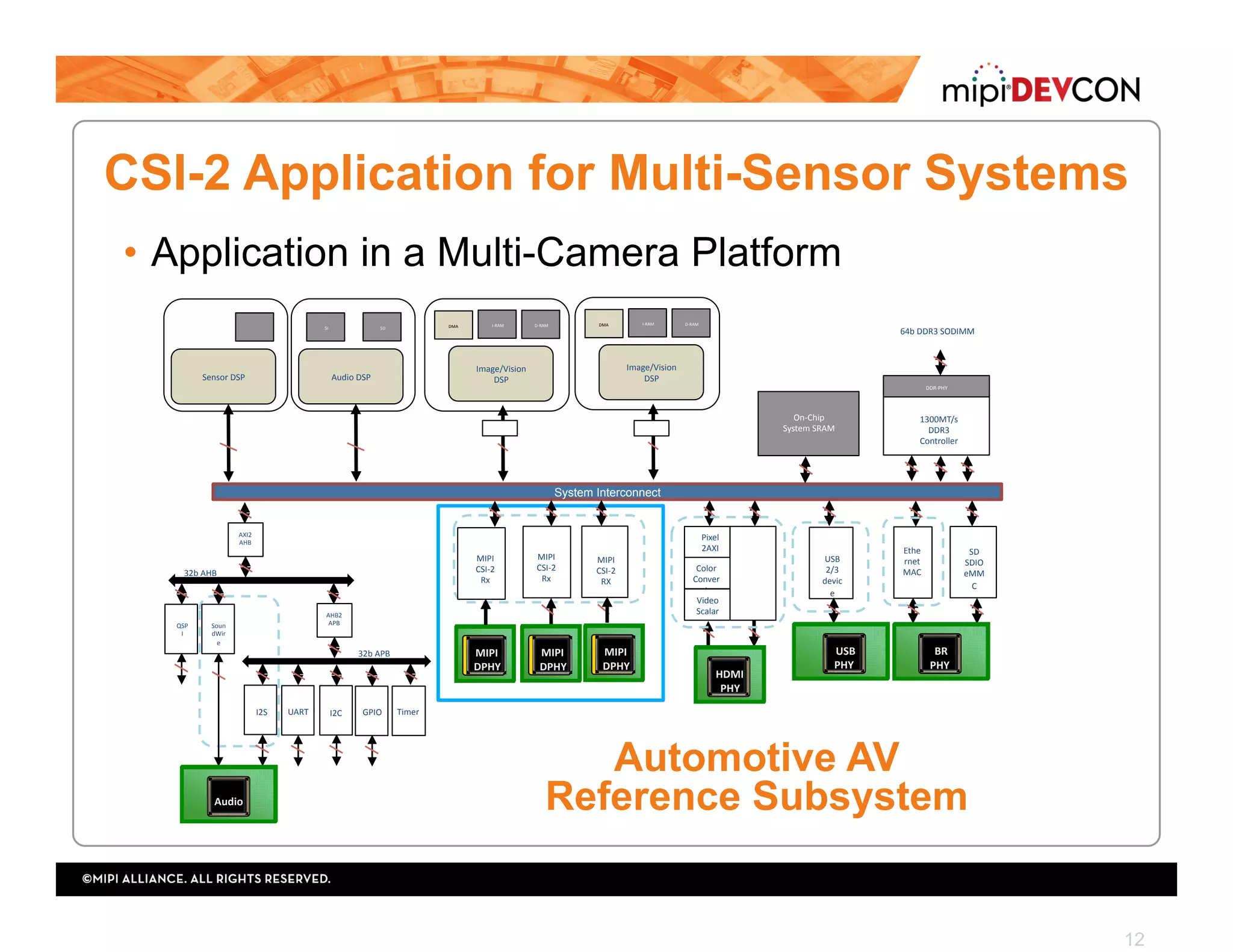
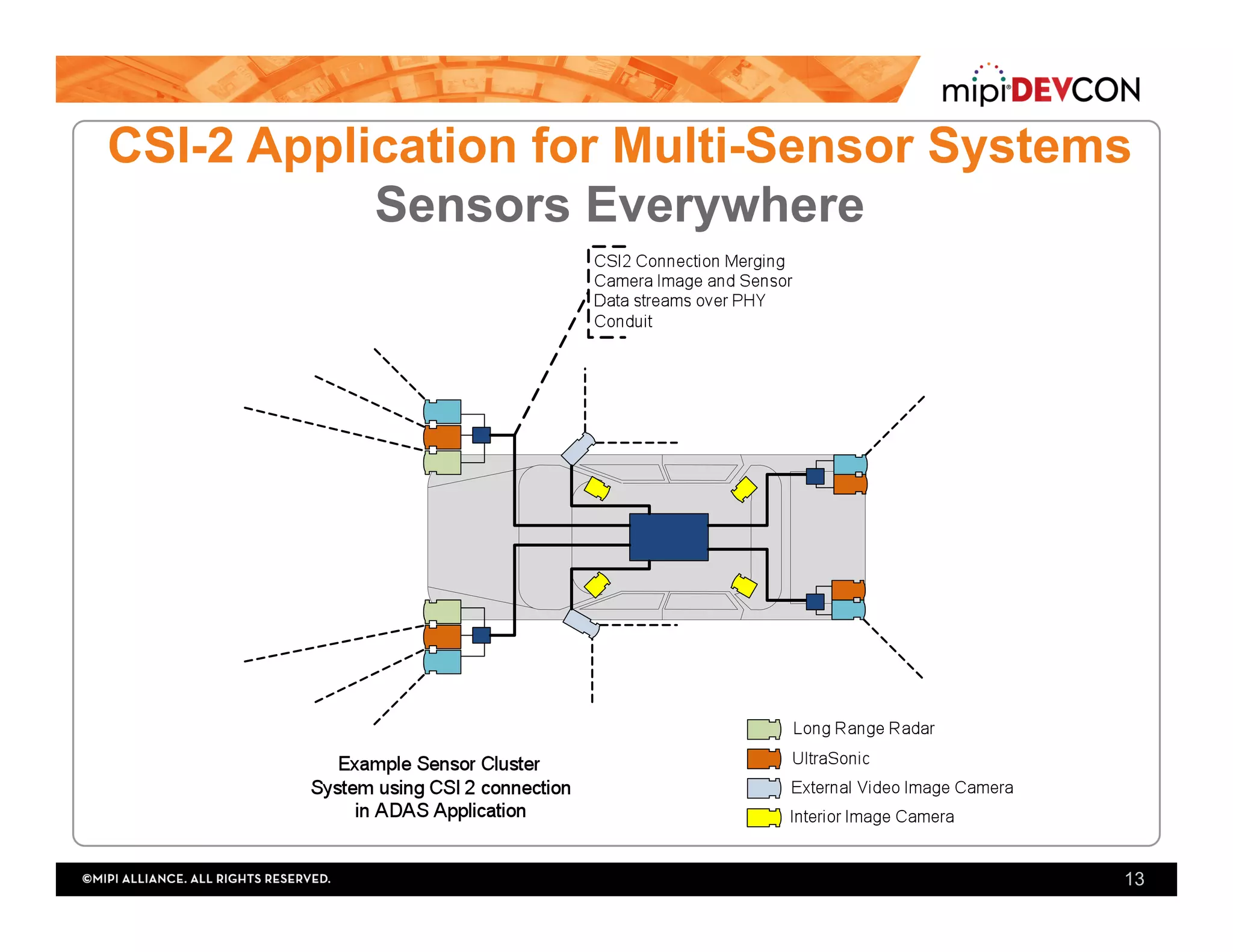
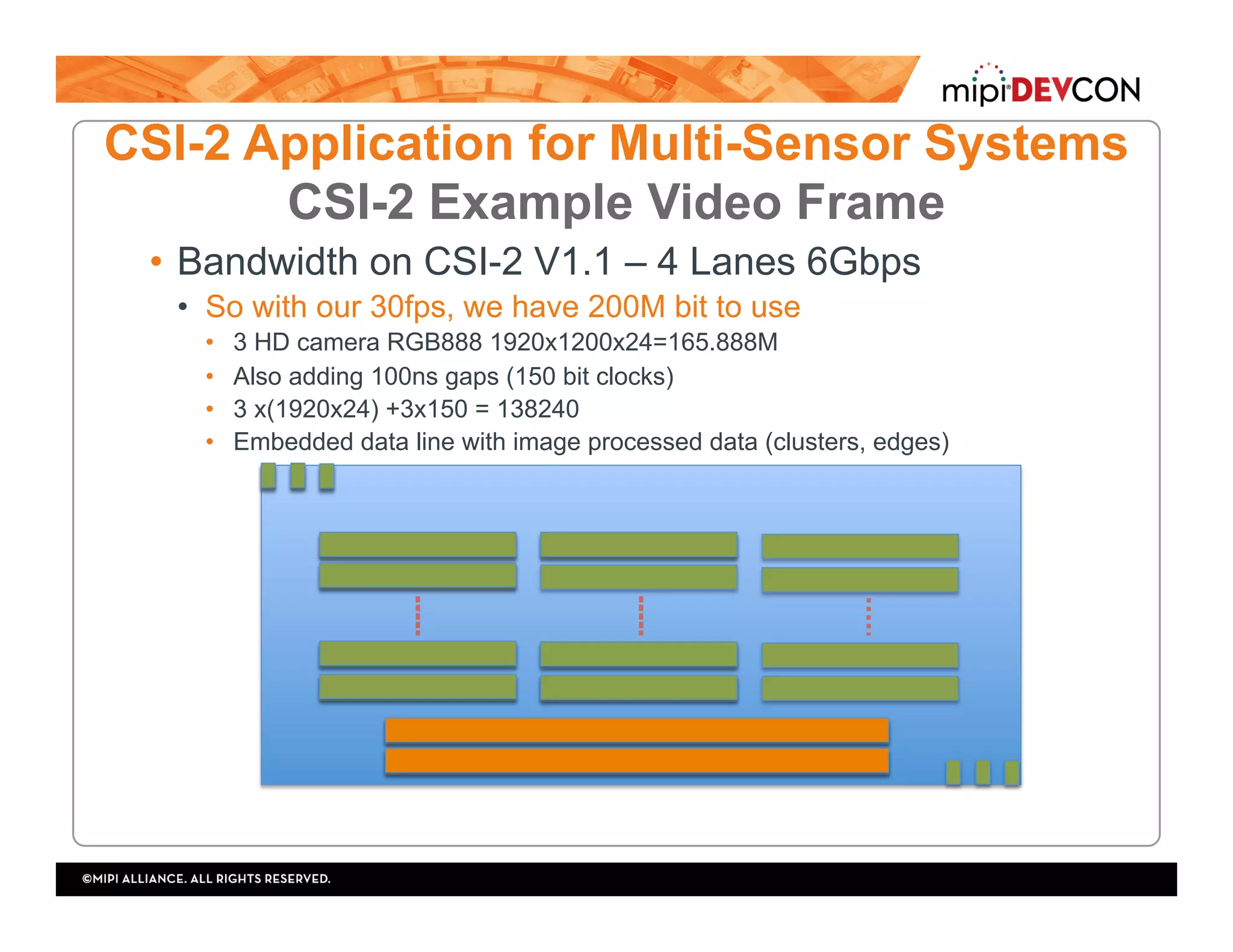
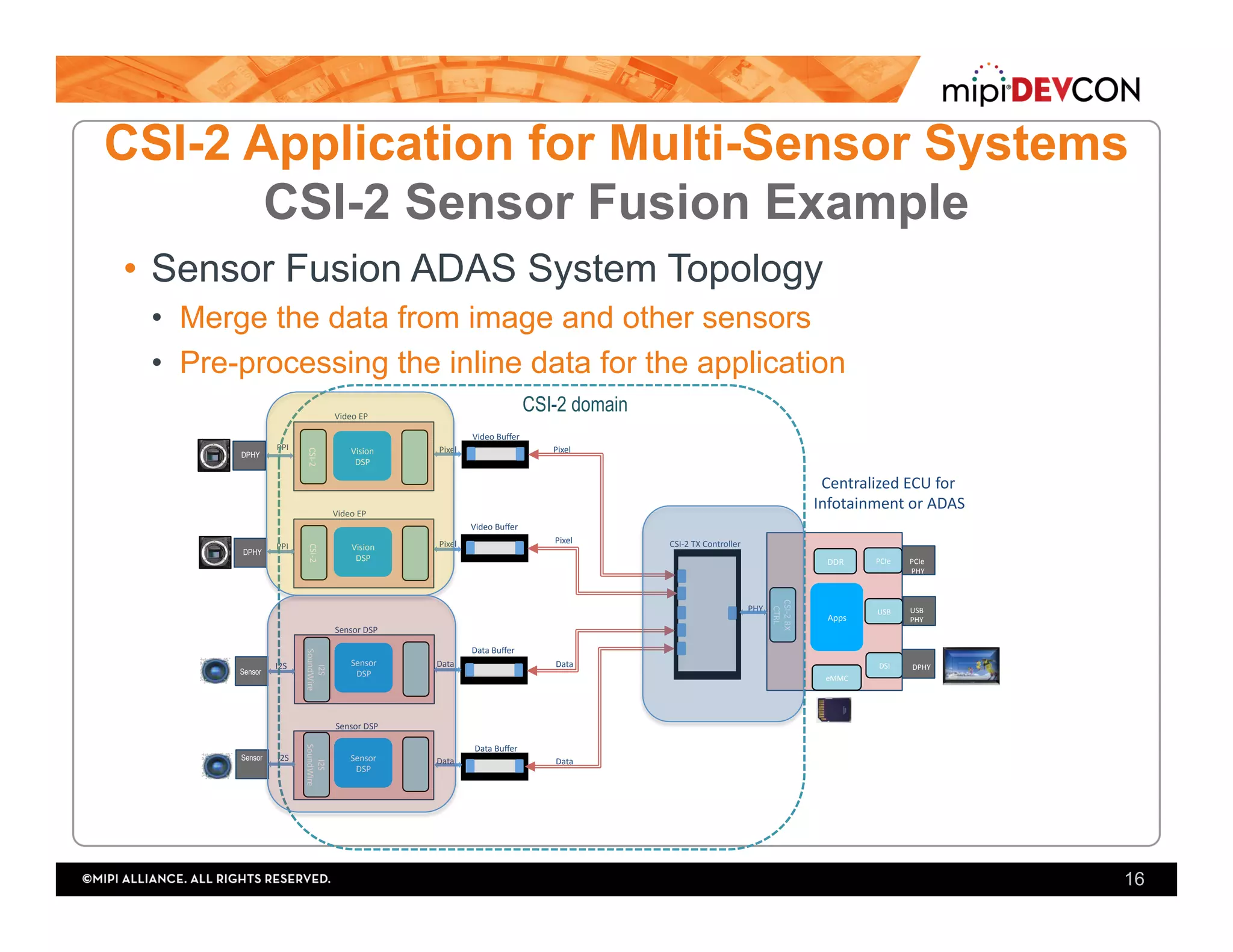
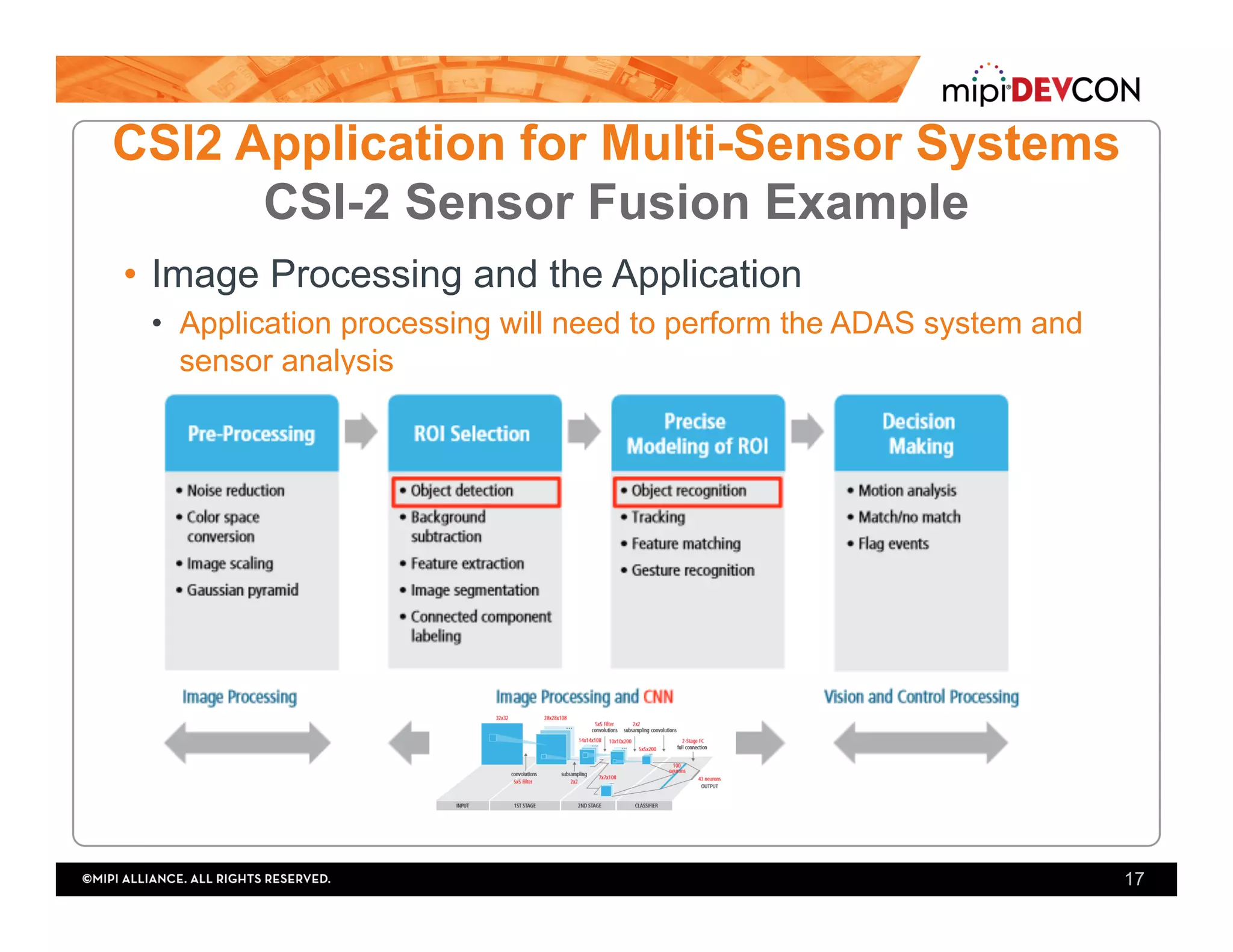
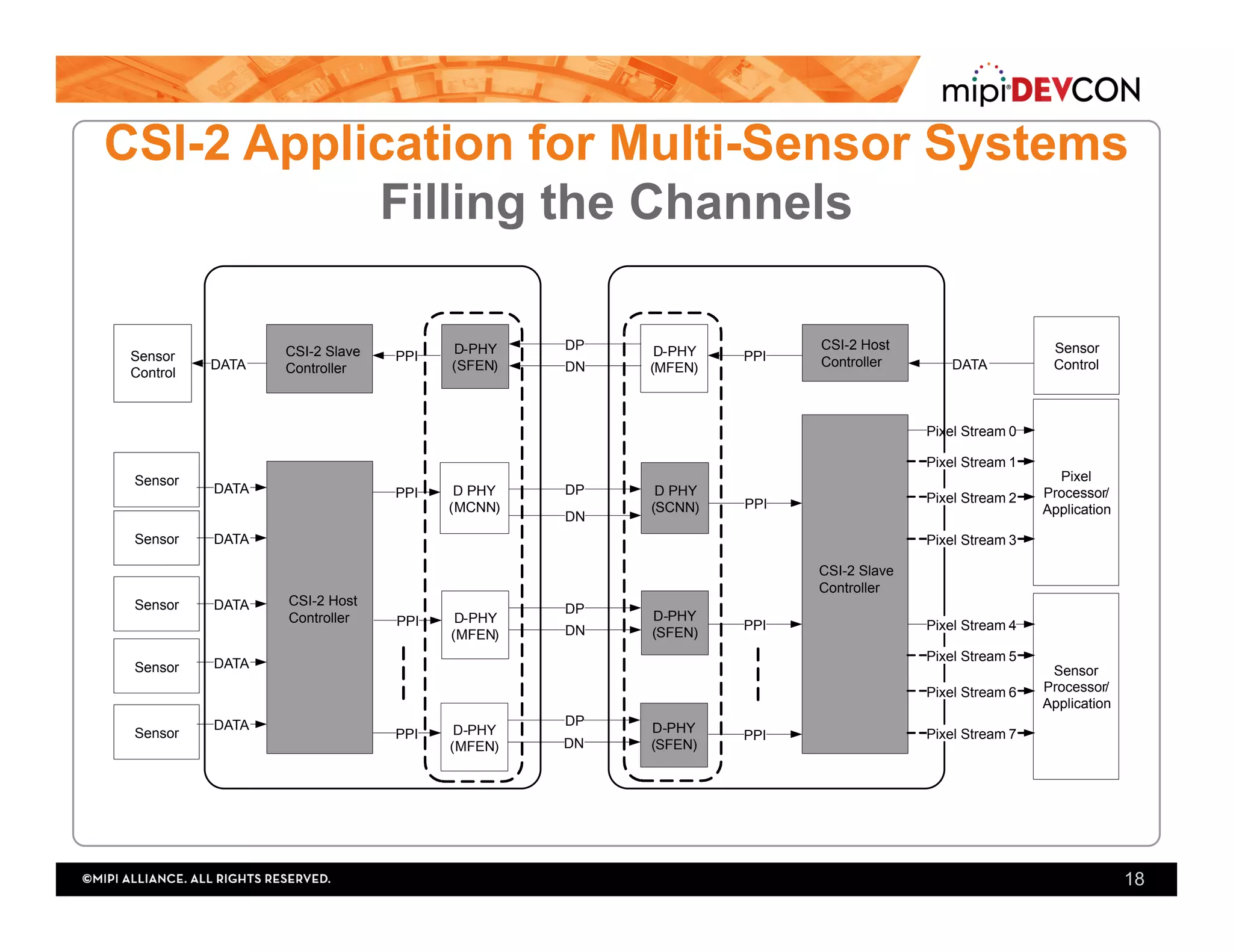
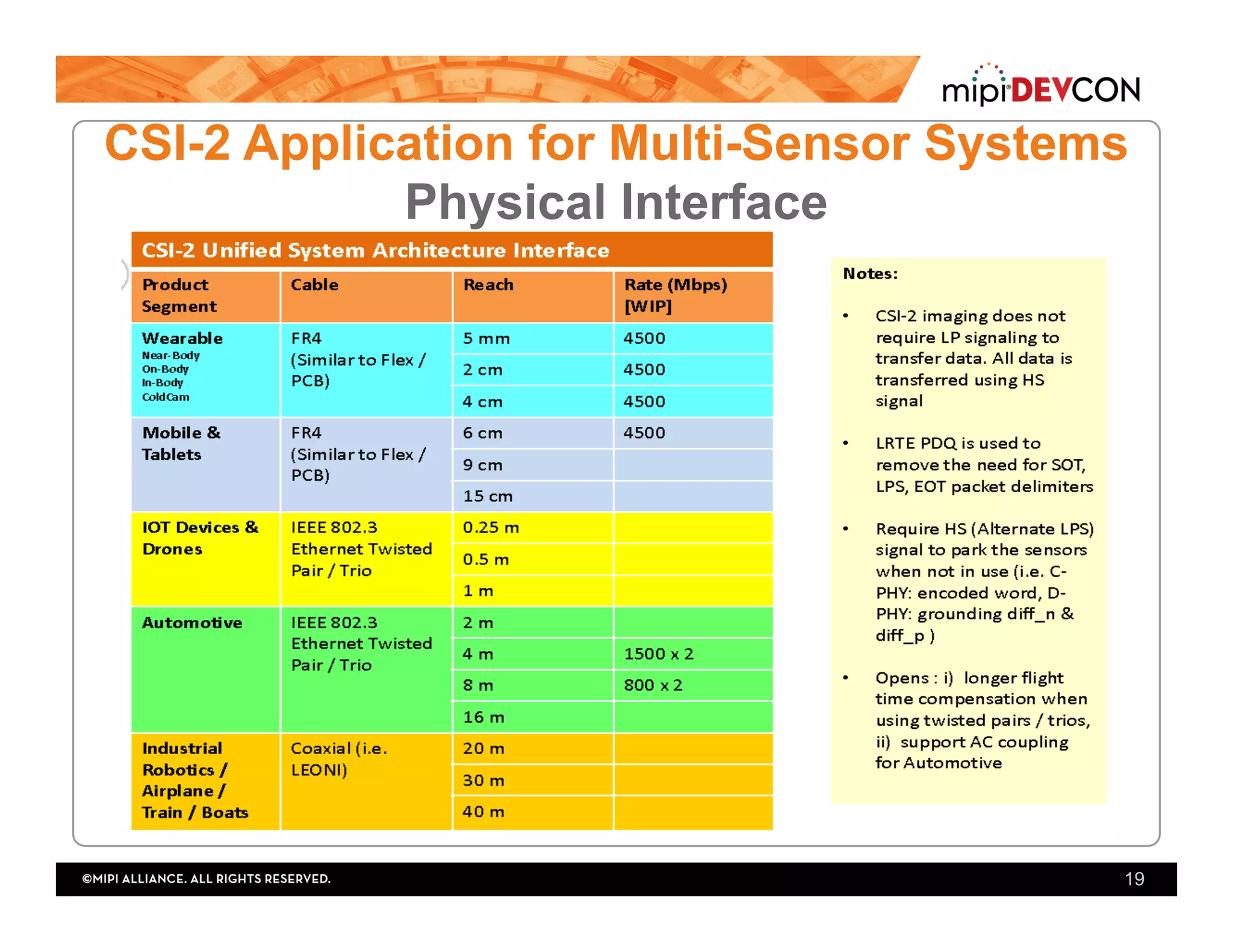
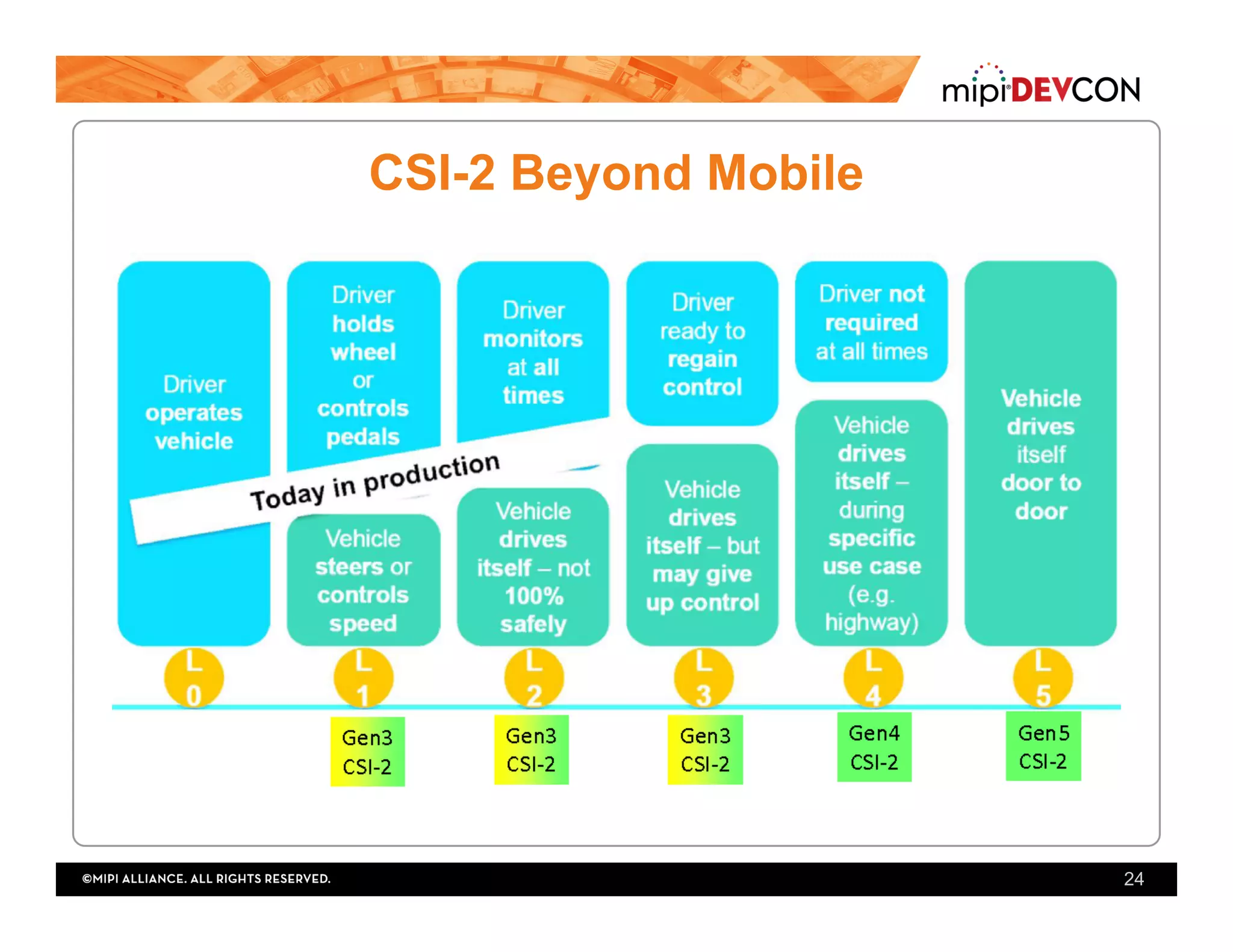

The document discusses the increasing demand for multi-camera and sensor fusion systems in various applications such as mobile, IoT, and automotive. It highlights advancements in MIPI CSI-2 interfaces and their role in enhancing imaging performance, including the requirements for processing data from multiple sensors. Key topics include the evolution of CSI-2 technology, its application in advanced driver-assistance systems, and considerations for functional safety and system architecture.