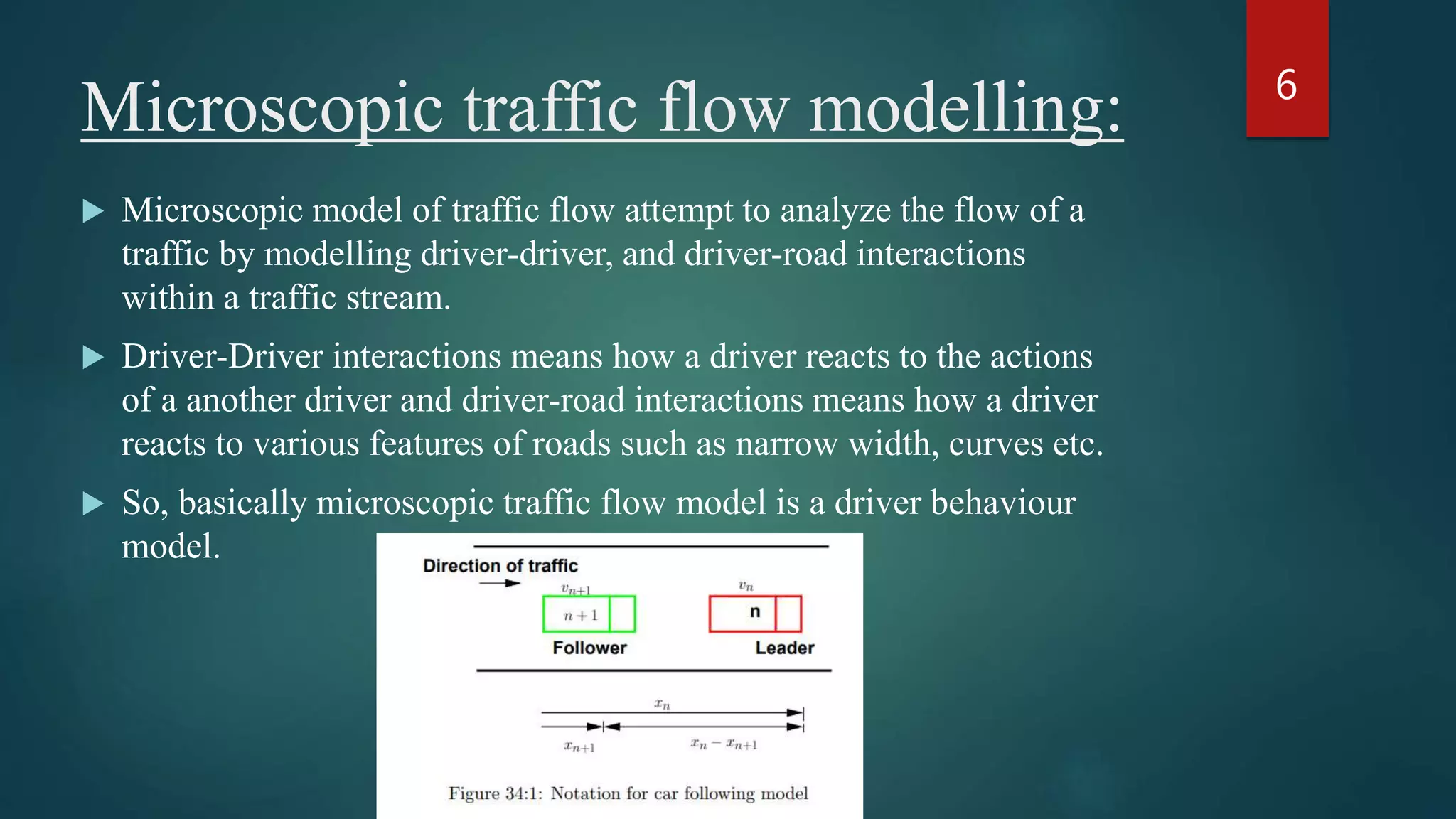
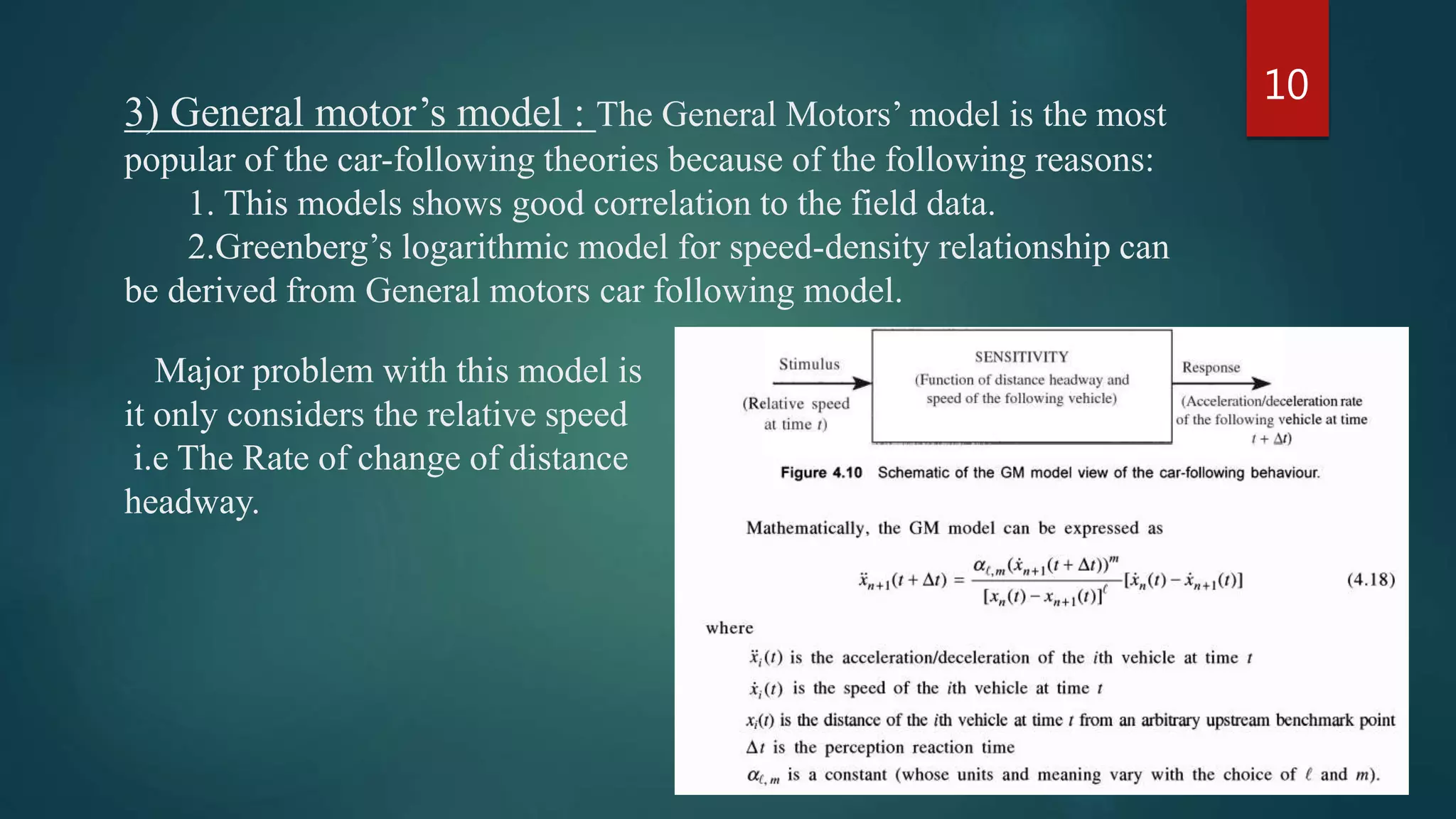
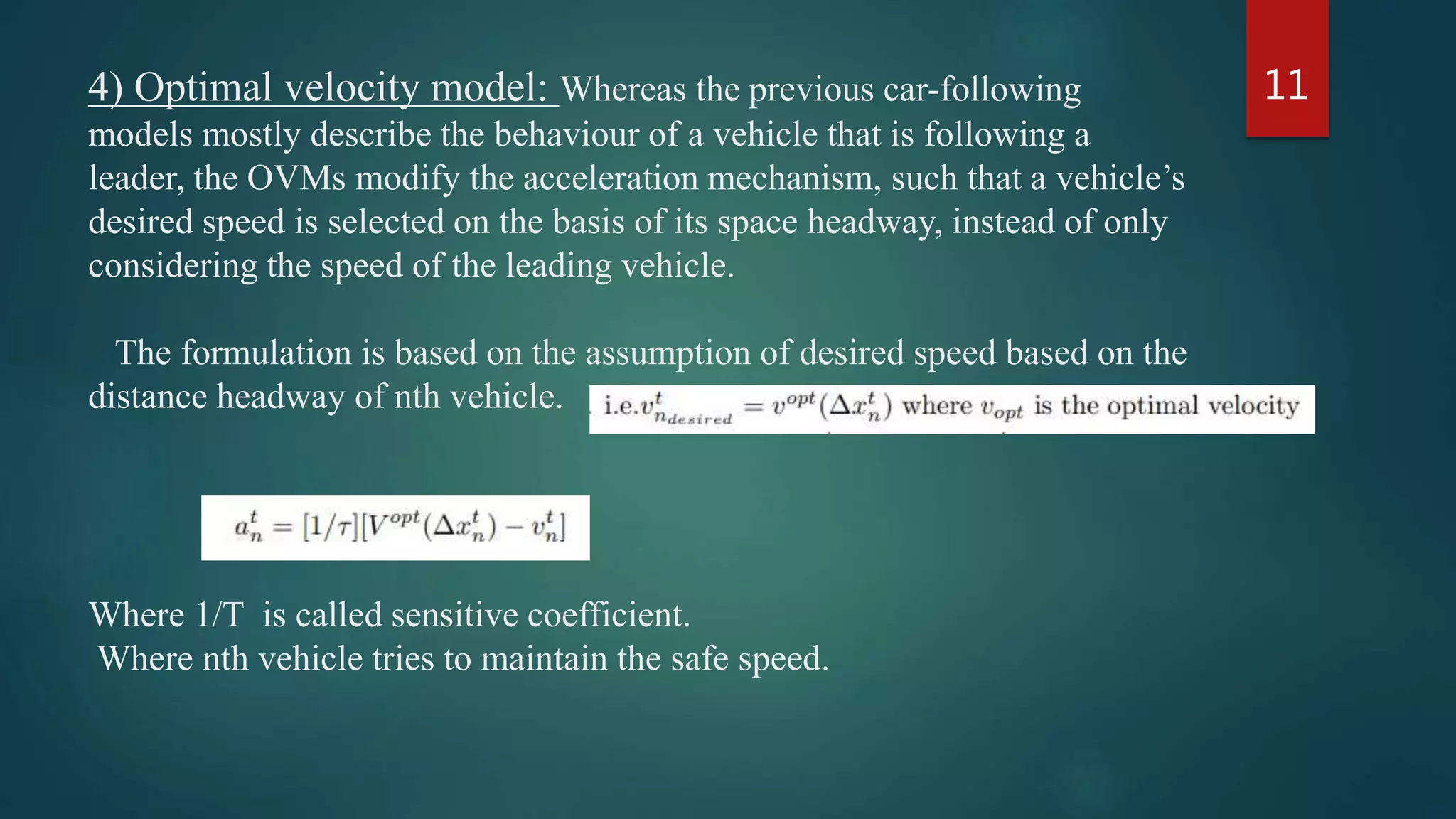
This document presents an overview of microscopic traffic flow modeling. It discusses the objectives of traffic flow modeling like reducing congestion and optimizing traffic. It classifies models as macroscopic, mesoscopic, and microscopic. Microscopic models attempt to analyze traffic by modeling driver-driver and driver-road interactions. Various car following models are described, including the Pipes, Forbes, General Motors, Optimal Velocity, and Wiedemann models. Microscopic models help analyze small changes in traffic over time and space to better understand traffic behavior.