Dokumen ini membahas mekanika Hamilton yang menggantikan pendekatan Newtonian dalam menganalisis gerak benda ketika gaya tidak dapat diketahui. Konsep kekekalan energi dijelaskan, menunjukkan bahwa energi total dalam sistem mekanik tetap konstan, dan diilustrasikan melalui contoh kasus termasuk gerak osilator harmonik dan pergerakan di bawah medan sentral. Dengan pendekatan Hamilton, fungsi energi sistem dinyatakan sebagai kombinasi energi kinetik dan potensial, serta hukum kekekalan energi berlaku untuk sistem dengan medan gaya konstan.

![KEKEKALAN ENERGI DARI TINJAUAN
LANGRANGE
• Dalam hal ini T adalah fungsi kecepatan kuadrat. Jika digunakan teorema Euler untuk suatu fungsi
homogen dikerjakan pada fungsi ini akan diperoleh:
𝑖
𝑞𝑖
𝜕𝐿
𝑞𝑖
=
𝑖
𝑞𝑖
𝜕𝑇
𝑞𝑖
= 2𝑇
• Dengan mensubtitusikan persamaan ini ke pers [6.1] didapat bahwa:
E = T ( q, 𝑞 ) - ∪ (q) (Persamaan 2)
• Dan jika dinyatakan dalam koordinat Cartesioan
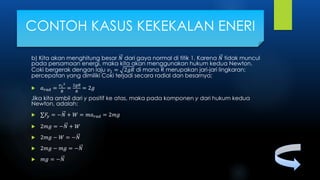
𝑎
𝑚 𝑎 𝑣 𝑎
2
+ 𝑈(𝑟1, 𝑟2, … ) (Persamaan 3)
• Dengan cara ini energi suatu sistem dapat ditulis mengandung dua suku yang berbeda yaitu energi
kinetik yang bergantung pada kecepatan dan energi potensial yang bergantung pada koordinat
partikel yang bersangkutan.
MENU](https://image.slidesharecdn.com/mekanikaii-150720054437-lva1-app6891/85/Mekanika-II-9-320.jpg)










































![Modul Ajar KBC Fikih Kelas 2 MI [MODULKELAS.COM]](https://cdn.slidesharecdn.com/ss_thumbnails/modulajarkbcfikihkelas2mimodulkelas-260129153051-998e7c8f-thumbnail.jpg?width=640&height=640&fit=bounds)



