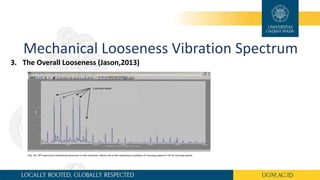
This document discusses mechanical looseness in machines. It defines mechanical looseness as improper contact between component parts, characterized by high amplitude vibrations at harmonics of the running frequency. There are two types of mechanical looseness: non-rotating caused by loose stationary parts, and rotating caused by clearance between rotating and stationary elements. Specific causes mentioned include loose foundation bolts, bearing liner loose in cap, and loose impeller on a shaft. The effects are increased vibration levels and potential for detached parts to cause damage. Vibration spectrum analysis can help identify the type of looseness based on the harmonic frequencies present.