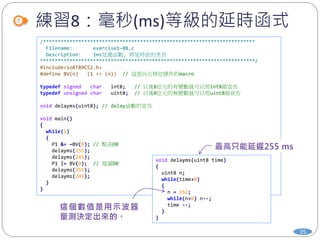
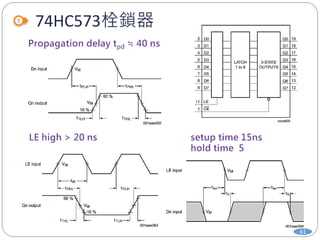
自己定義資料型別關鍵字
25
typedef signed charint8;
typedef unsigned char uint8;
typedef signed short int16;
typedef unsigned short uint16;
typedef signed long int32;
typedef unsigned long uint32;
typedef unsigned char bool;
CG RAM (自製字元圖形)
staticuint8 LCD_DispBar1[] =
{0x10, 0x10, 0x10, 0x10, 0x10, 0x10, 0x10, 0x10};
static uint8 LCD_DispBar2[] =
{0x18, 0x18, 0x18, 0x18, 0x18, 0x18, 0x18, 0x18};
static uint8 LCD_DispBar3[] =
{0x1C, 0x1C, 0x1C, 0x1C, 0x1C, 0x1C, 0x1C, 0x1C};
static uint8 LCD_DispBar4[] =
{0x1E, 0x1E, 0x1E, 0x1E, 0x1E, 0x1E, 0x1E, 0x1E};
static uint8 LCD_DispBar5[] =
{0x1F, 0x1F, 0x1F, 0x1F, 0x1F, 0x1F, 0x1F, 0x1F};
/**********************************************************
* @fn LCD_DefChar
* @brief This function help you define your own pattern
* @param uint8 id: offset of the CGRAM, uint8 *pat points
* to the pattern table (array).
* @return None
***********************************************************/
void LCD_DefChar(uint8 id, uint8 *pat)
{
uint8 i;
LCD_CmdWr(0x40 + ( id<<3 )); // Set address of CGRAM
for(i=0;i<8;i++){
LCD_DataWr(*pat++);
}
}
72
73.
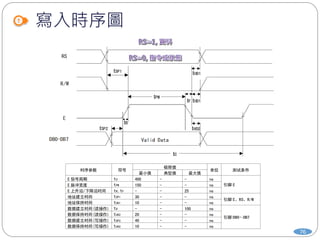
LCM共有11種指令
73
指令
動作
RS R/W DB7DB6 DB5 DB4 DB3 DB2 DB1 DB0
執行
時間
功能設定 0 0 0 0 1 DL(1) N(2) F(3) X X 40 us
清除顯示器 0 0 0 0 0 0 0 0 0 1 1.64ms
游標回左上角 0 0 0 0 0 0 0 0 1 X 40 us
設定輸入模式 0 0 0 0 0 0 0 1 I/D(4) S(4) 40 us
螢幕開或關 0 0 0 0 0 0 1 D C B 40 us
游標/顯示移位 0 0 0 0 0 1 S/C(5) R/L(5) X X 40 us
設定CGRAM地址 0 0 0 1 A A A A A A 40 us
設定DDRAM地址 0 0 1 A A A A A A A 40 us
讀取BF與地址 0 1 BF(6) A A A A A A A 40 us
寫資料至RAM 1 0 D D D D D D D D 40 us
從RAM讀資料 1 1 D D D D D D D D 40 us
74.
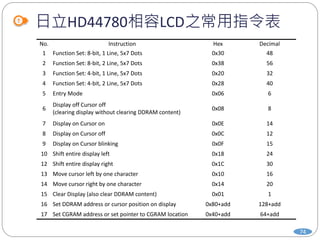
日立HD44780相容LCD之常用指令表
74
No. Instruction HexDecimal
1 Function Set: 8-bit, 1 Line, 5x7 Dots 0x30 48
2 Function Set: 8-bit, 2 Line, 5x7 Dots 0x38 56
3 Function Set: 4-bit, 1 Line, 5x7 Dots 0x20 32
4 Function Set: 4-bit, 2 Line, 5x7 Dots 0x28 40
5 Entry Mode 0x06 6
6
Display off Cursor off
(clearing display without clearing DDRAM content)
0x08 8
7 Display on Cursor on 0x0E 14
8 Display on Cursor off 0x0C 12
9 Display on Cursor blinking 0x0F 15
10 Shift entire display left 0x18 24
12 Shift entire display right 0x1C 30
13 Move cursor left by one character 0x10 16
14 Move cursor right by one character 0x14 20
15 Clear Display (also clear DDRAM content) 0x01 1
16 Set DDRAM address or cursor position on display 0x80+add 128+add
17 Set CGRAM address or set pointer to CGRAM location 0x40+add 64+add
81
/*******************************************************************************************
* @fn LCD_ClrLine
*@brief Clear a certain line
* @param uint8 line: 1 is the first line, and 2 is the second line
* @return None
******************************************************************************************/
void LCD_ClrLine(uint8 line)
{
uint8 i;
if(line < LCD_MaxRows)
{
LCD_CursorSet(line, 0);
for(i=0;i<LCD_MaxCols;i++){
LCD_DataWr(' ');
}
LCD_CursorSet(line, 0);
}
}
/************************************
* @fn LCD_ClrScr
* @brief Clear whole screen
* @param None
* @return None
***********************************/
void LCD_ClrScr(void)
{
LCD_CmdWr(LCD_CMD_CLS);
}
/***********************************************
* @fn LCD_DataWr
* @brief Write a data to the LCD
* @param uint8 data: the data
* @return None
**********************************************/
void LCD_DataWr(uint8 data)
{
delayms(1);
LCD_RS = LCD_SEL_DATA;
LCD_RW = LCD_IO_WRITE;
LCD_DATA_PORT = data;
delayms(1);
LCD_EN = 1;
delayms(1);
LCD_EN = 0;
}
82.
82
/***********************************************************************************
* @fn LCD_CursorSet
*@brief Set the position of the cursor
* @param (uint8 row, uint8 col) sets the position
* @return None
**********************************************************************************/
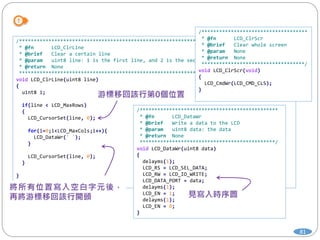
static void LCD_CursorSet(uint8 row, uint8 col)
{
switch(row){
case 0:
if(LCD_MaxRows==1){
if (col < (LCD_MaxCols >> 1)) // If used only one line LCD
LCD_CmdWr(0x80 + col); // First half of line starts at 0x80
else // Second half of line starts at 0xC0
LCD_CmdWr(0xC0 + col - (LCD_MaxCols >> 1));
}else{
LCD_CmdWr(0x80 + col); // select line 1
}
break;
case 1:
LCD_CmdWr(0xC0 + col); // select line 2
break;
case 2:
LCD_CmdWr(0x80 + LCD_MaxCols + col); // select line 3
break;
case 3:
LCD_CmdWr(0xC0 + LCD_MaxCols + col); // select line 4
break;
}
}
83.
83
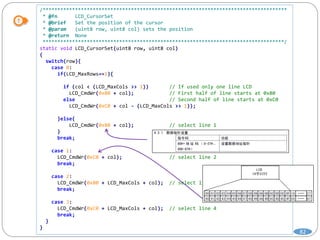
/*************************************************************************************
* @fn LCD_DispChar
*@brief Show a character at specific postion
* @param (uint8 row, uint8 col) is the postion, and char c: the character to show
* @return None
************************************************************************************/
void LCD_DispChar(uint8 row, uint8 col, char c)
{
if(row < LCD_MaxRows && col < LCD_MaxCols)
{
LCD_CursorSet(row, col);
LCD_DataWr(c);
}
}
/***********************************************************************************
* @fn LCD_DispStr
* @brief Display a string from a specific position
* @param (uint8 row, uint8 col) sets the position and char *s is the string
* @return None
*********************************************************************************/
void LCD_DispStr(uint8 row, uint8 col, char *s)
{
uint8 i;
if(row < LCD_MaxRows && col < LCD_MaxCols){
LCD_CursorSet(row, col);
i = col;
while( i < LCD_MaxCols && *s){
LCD_DataWr(*s++);
i++;
}
}
}
84.
/***************************************************************************************************
* @fn LCD_DispHorBar
*@brief Display the horizon bar
* @param (uint8 row, uint8 col) sets the position, uint8 val sets the value of full (100%)
* @return None
***************************************************************************************************/
void LCD_DispHorBar(uint8 row, uint8 col, uint8 val)
{
uint8 i, full, frac;
full = val/5; // how many full blocks to turn on
frac = val%5; // portion of block
if(row < LCD_MaxRows && (col + full -1) < LCD_MaxCols){
i = 0;
LCD_CursorSet(row, col);
while(full > 0)
{
LCD_DataWr(5); // Send Custom character #5, which is full block
i++;
full--;
}
if(frac>0){
LCD_DataWr(frac); // custom char #frac
}
}
}
/**************************************
* @fn LCD_DispHorBarInit
* @brief HorizonBar Initilize
* @param None
* @return None
*************************************/
void LCD_DispHorBarInit(void)
{
LCD_DefChar(1, &LCD_DispBar1[0]);
LCD_DefChar(2, &LCD_DispBar2[0]);
LCD_DefChar(3, &LCD_DispBar3[0]);
LCD_DefChar(4, &LCD_DispBar4[0]);
LCD_DefChar(5, &LCD_DispBar5[0]);
}
84
85.
85
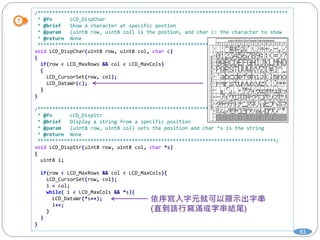
/**********************************************************
* @fn LCD_DefChar
*@brief This function help you define your own pattern
* @param uint8 id: offset of the CGRAM, uint8 *pat points
* to the pattern table (array).
* @return None
***********************************************************/
void LCD_DefChar(uint8 id, uint8 *pat)
{
uint8 i;
LCD_CmdWr(0x40 + ( id<<3 )); // Set address of CGRAM
for(i=0;i<8;i++){
LCD_DataWr(*pat++);
}
}
/********************************************************
* @fn delayms
* @brief delay with ms
* @param time = 0 ~ 255, the maximum delay is 255 ms
* @return None
********************************************************/
void delayms(uint8 time)
{
uint8 n;
while(time>0)
{
n = 162;
while(n>0) n--;
time --;
}
}

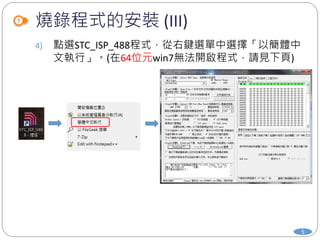
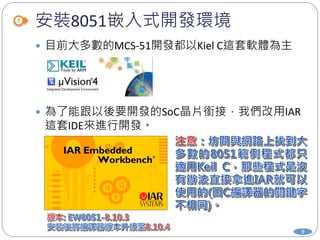


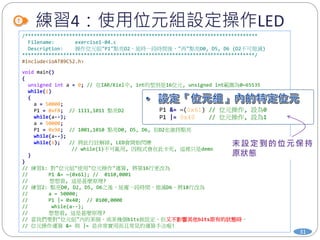
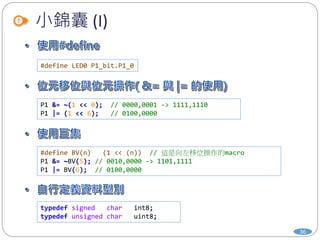
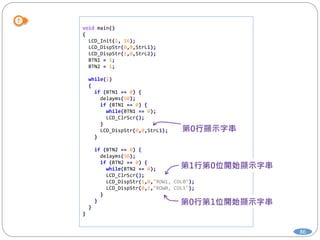
![練習2:點亮多顆顯示器(I)
59
/*******************************************************************
Filename: exercise3-02.c
Description: 依序顯示符號0, 1,2,3, ->, A, b, C, d, E, F
********************************************************************/
#include<ioAT89C52.h>
#define seg_set P2_bit.P2_6
#define pos_set P2_bit.P2_7
#define SEG7LED P0
#define POS7LED P0
typedef unsigned char uint8;
void DispScrClr(void);
void DispShowPos(uint8 pos);
void DispShowSym(uint8 sym_num, uint8 dp);
void delayms(uint8 time);
// 符號表 0,1,2,...,9, A, b, C, d, E, F
uint8 symbols[]={
0x3F,0x06,0x5B,0x4F,
0x66,0x6D,0x7D,0x07,
0x7F,0x6F,0x77,0x7C,
0x39,0x5E,0x79,0x71};
void main()
{
DispScrClr();
uint8 symbol_num;
while(1)
{
DispShowPos(0xF0); // 1111, 0000 (pos0~3)
for(symbol_num=0;symbol_num<16;symbol_num++)
{
if (symbol_num>5){
DispShowPos(0xE0); // 1110, 0000
DispShowSym(symbol_num, 1);
}else{
DispShowSym(symbol_num, 0);
}
delayms(255);
}
DispScrClr();
delayms(255);
}
}](https://image.slidesharecdn.com/mcs51iarpart1-150613071712-lva1-app6892/85/MCS-51-IAR-1-59-320.jpg)
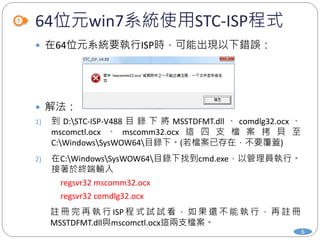
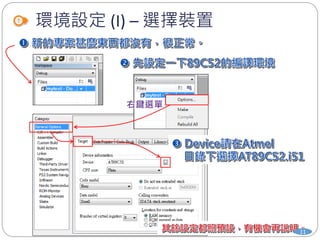
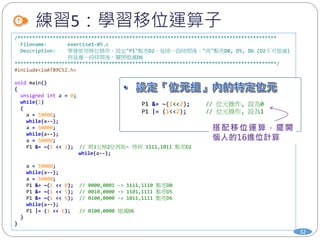
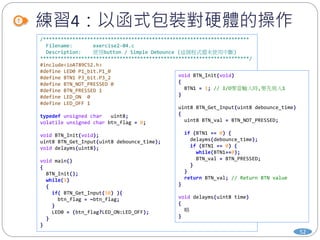
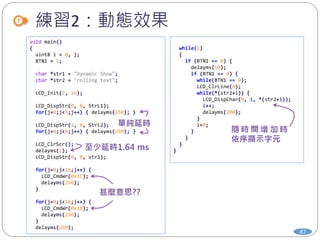
![練習2:點亮多顆顯示器(II)
/**************************************************************************
* @fn DispScrClr
* @brief Clear the Display Screen. Clear all 7-Seg LEDs into blank
* @param None
* @return None
*************************************************************************/
void DispScrClr(void)
{
SEG7LED = 0x00;
seg_set = 1;
seg_set = 0;
POS7LED = 0xFF;
pos_set = 1;
pos_set = 0;
}
/*************************************************************************
* @fn DispShowPos
* @brief Show the Display Screen with assigned positions.
* @param None
* @return None
************************************************************************/
void DispShowPos(uint8 pos)
{
POS7LED = ~pos;
pos_set = 1;
pos_set = 0;
}
/*********************************************************
* @fn DispShowSym
* @brief Show the Symbol with dot-point(dp) or not
********************************************************/
void DispShowSym(uint8 sym_num, uint8 dp)
{
uint8 sym;
if(dp!=0)
sym = symbols[sym_num]|0x80;
else
sym = symbols[sym_num];
SEG7LED = sym;
seg_set = 1;
seg_set = 0;
}
/********************************************************
* @fn delayms
* @brief delay with ms
********************************************************/
void delayms(uint8 time)
{
uint8 n;
while(time>0)
{
n = 162;
while(n>0) n--;
time --;
}
}
60](https://image.slidesharecdn.com/mcs51iarpart1-150613071712-lva1-app6892/85/MCS-51-IAR-1-60-320.jpg)
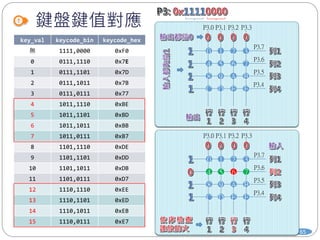
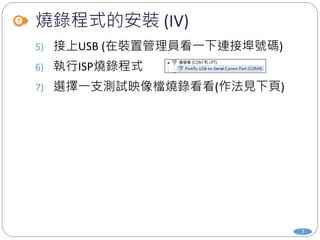
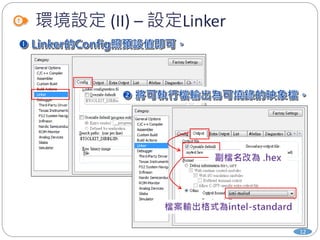
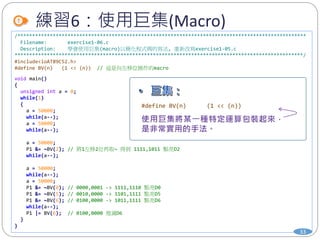
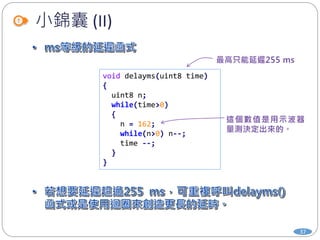
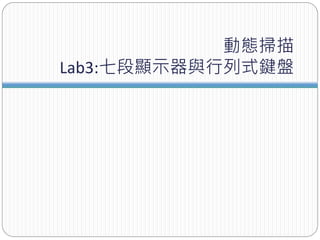
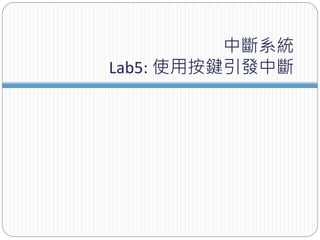
![練習4:將按下掃描鍵盤值顯示出來
66
/*********************************************************
Filename: exercise3-04.c
Description: keypad scan
*********************************************************/
#include<ioAT89C52.h>
#define seg_set P2_bit.P2_6
#define pos_set P2_bit.P2_7
#define KeyPort P3
typedef unsigned char uint8;
uint8 KeypadScan(void);
uint8 KeyPushed(uint8 keycode);
volatile uint8 n;
void delayms(uint8 time);
uint8 symbols[]={
0x3F,0x06,0x5B,0x4F,
0x66,0x6D,0x7D,0x07,
0x7F,0x6F,0x77,0x7C,
0x39,0x5E,0x79,0x71};
void main()
{
// use POS4 of 7-seg LED to show the pushed key number
P0=0xEF;
pos_set=1;
pos_set=0;
while(1)
{
KeyPort = 0xF0; // H4-1(input), L4-0(output)
if(KeyPort!=0xF0) {
delayms(25);
n = KeyPushed(KeypadScan());
}
if(n!=0xFF) {
P0=symbols[n];
seg_set=1;
seg_set=0;
}else{
P0=0x00;
seg_set=1;
seg_set=0;
}
}
}](https://image.slidesharecdn.com/mcs51iarpart1-150613071712-lva1-app6892/85/MCS-51-IAR-1-66-320.jpg)
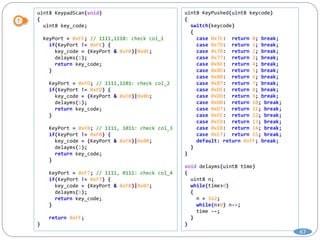
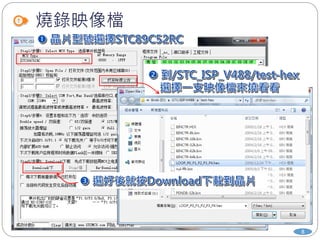
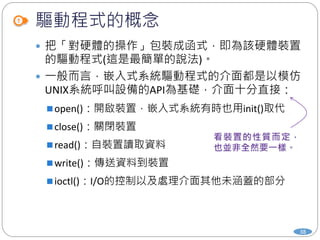
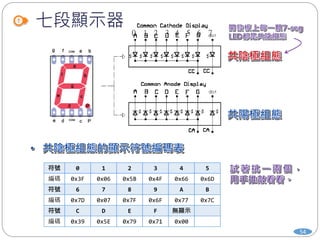
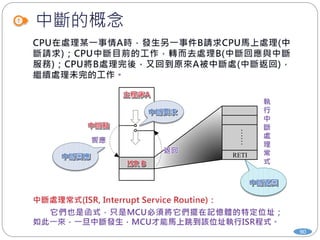
![CG RAM (自製字元圖形)
static uint8 LCD_DispBar1[] =
{0x10, 0x10, 0x10, 0x10, 0x10, 0x10, 0x10, 0x10};
static uint8 LCD_DispBar2[] =
{0x18, 0x18, 0x18, 0x18, 0x18, 0x18, 0x18, 0x18};
static uint8 LCD_DispBar3[] =
{0x1C, 0x1C, 0x1C, 0x1C, 0x1C, 0x1C, 0x1C, 0x1C};
static uint8 LCD_DispBar4[] =
{0x1E, 0x1E, 0x1E, 0x1E, 0x1E, 0x1E, 0x1E, 0x1E};
static uint8 LCD_DispBar5[] =
{0x1F, 0x1F, 0x1F, 0x1F, 0x1F, 0x1F, 0x1F, 0x1F};
/**********************************************************
* @fn LCD_DefChar
* @brief This function help you define your own pattern
* @param uint8 id: offset of the CGRAM, uint8 *pat points
* to the pattern table (array).
* @return None
***********************************************************/
void LCD_DefChar(uint8 id, uint8 *pat)
{
uint8 i;
LCD_CmdWr(0x40 + ( id<<3 )); // Set address of CGRAM
for(i=0;i<8;i++){
LCD_DataWr(*pat++);
}
}
72](https://image.slidesharecdn.com/mcs51iarpart1-150613071712-lva1-app6892/85/MCS-51-IAR-1-72-320.jpg)

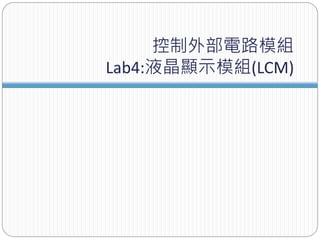
![79
static uint8 LCD_MaxCols;
static uint8 LCD_MaxRows;
static uint8 LCD_DispBar1[] = {0x10, 0x10, 0x10, 0x10, 0x10, 0x10, 0x10, 0x10};
static uint8 LCD_DispBar2[] = {0x18, 0x18, 0x18, 0x18, 0x18, 0x18, 0x18, 0x18};
static uint8 LCD_DispBar3[] = {0x1C, 0x1C, 0x1C, 0x1C, 0x1C, 0x1C, 0x1C, 0x1C};
static uint8 LCD_DispBar4[] = {0x1E, 0x1E, 0x1E, 0x1E, 0x1E, 0x1E, 0x1E, 0x1E};
static uint8 LCD_DispBar5[] = {0x1F, 0x1F, 0x1F, 0x1F, 0x1F, 0x1F, 0x1F, 0x1F};
char StrL1[]="LCD 1602 Test";
char StrL2[]="OK";
static void LCD_CursorSet(uint8 row, uint8 col);
void LCD_DataWr(uint8 data);
void LCD_CmdWr(uint8 cmd);
void LCD_Init(uint8 maxrows, uint8 maxcols);
void LCD_DispChar(uint8 row, uint8 col, char c);
void LCD_DispStr(uint8 row, uint8 col, char *s);
void LCD_ClrLine(uint8 line);
void LCD_ClrScr(void);
void LCD_DefChar(uint8 id, uint8 *pat);
void LCD_DispHorBarInit(void);
void LCD_DispHorBar(uint8 row, uint8 col, uint8 val);
void delayms(uint8 time);](https://image.slidesharecdn.com/mcs51iarpart1-150613071712-lva1-app6892/85/MCS-51-IAR-1-79-320.jpg)
![/***************************************************************************************************
* @fn LCD_DispHorBar
* @brief Display the horizon bar
* @param (uint8 row, uint8 col) sets the position, uint8 val sets the value of full (100%)
* @return None
***************************************************************************************************/
void LCD_DispHorBar(uint8 row, uint8 col, uint8 val)
{
uint8 i, full, frac;
full = val/5; // how many full blocks to turn on
frac = val%5; // portion of block
if(row < LCD_MaxRows && (col + full -1) < LCD_MaxCols){
i = 0;
LCD_CursorSet(row, col);
while(full > 0)
{
LCD_DataWr(5); // Send Custom character #5, which is full block
i++;
full--;
}
if(frac>0){
LCD_DataWr(frac); // custom char #frac
}
}
}
/**************************************
* @fn LCD_DispHorBarInit
* @brief HorizonBar Initilize
* @param None
* @return None
*************************************/
void LCD_DispHorBarInit(void)
{
LCD_DefChar(1, &LCD_DispBar1[0]);
LCD_DefChar(2, &LCD_DispBar2[0]);
LCD_DefChar(3, &LCD_DispBar3[0]);
LCD_DefChar(4, &LCD_DispBar4[0]);
LCD_DefChar(5, &LCD_DispBar5[0]);
}
84](https://image.slidesharecdn.com/mcs51iarpart1-150613071712-lva1-app6892/85/MCS-51-IAR-1-84-320.jpg)
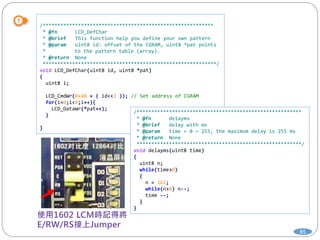
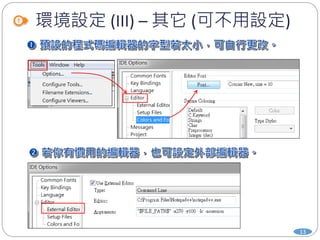
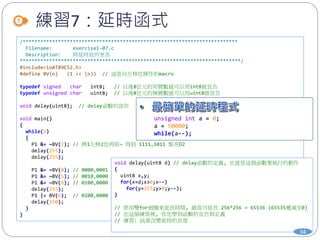
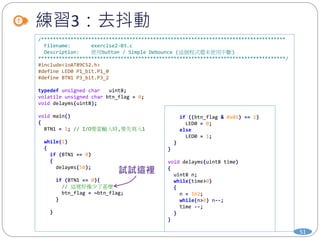
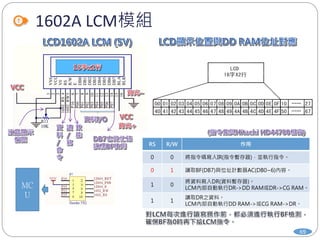
![練習3:進度條製作
88
void main()
{
uint8 i, percent_bar;
char num[4];
BTN1 = 1;
char *str1 = "Dynamic Show";
LCD_Init(2, 16);
LCD_DispHorBarInit();
LCD_DispStr(0, 0, str1);
while(1)
{
if (BTN1 == 0) {
delayms(50);
if (BTN1 == 0) {
while(BTN1 == 0);
LCD_ClrLine(0);
LCD_ClrLine(1);
for(i=0;i<101;i++)
{
num[0] = (i/100)+0x30;
num[1] = ((i/10)%10)+0x30;
num[2] = (i%10)+0x30;
num[3] = 0x25;
if(num[0]==0x30) {
LCD_DispChar(0, 0, ' ');
if(num[1]==0x30)
LCD_DispChar(0, 1, ' ');
else
LCD_DispChar(0, 1, num[1]);
} else {
LCD_DispChar(0, 0, num[0]);
LCD_DispChar(0, 1, num[1]);
}
LCD_DispChar(0, 2, num[2]);
LCD_DispChar(0, 3, num[3]);
percent_bar = (i*100/125);
LCD_DispHorBar(1, 0, percent_bar);
delayms(200);
}
}
}
}
}](https://image.slidesharecdn.com/mcs51iarpart1-150613071712-lva1-app6892/85/MCS-51-IAR-1-88-320.jpg)


![[嵌入式系統] MCS-51 實驗 - 使用 IAR (2)](https://cdn.slidesharecdn.com/ss_thumbnails/mcs51iarpart2-150613071717-lva1-app6891-thumbnail.jpg?width=640&height=640&fit=bounds)
![[ZigBee 嵌入式系統] ZigBee Architecture 與 TI Z-Stack Firmware](https://cdn.slidesharecdn.com/ss_thumbnails/zigbeearchitecture-150613072045-lva1-app6892-thumbnail.jpg?width=640&height=640&fit=bounds)

![[ZigBee 嵌入式系統] ZigBee 應用實作 - 使用 TI Z-Stack Firmware](https://cdn.slidesharecdn.com/ss_thumbnails/zigbeeappimplementation-150613072040-lva1-app6891-thumbnail.jpg?width=640&height=640&fit=bounds)
![[嵌入式系統] 嵌入式系統進階](https://cdn.slidesharecdn.com/ss_thumbnails/advembedded-150613071653-lva1-app6892-thumbnail.jpg?width=640&height=640&fit=bounds)



















![RF Module Design - [Chapter 4] Transceiver Architecture](https://cdn.slidesharecdn.com/ss_thumbnails/rfch4-150613070346-lva1-app6891-thumbnail.jpg?width=640&height=640&fit=bounds)
![RF Module Design - [Chapter 2] Noises](https://cdn.slidesharecdn.com/ss_thumbnails/rfch2-150613070344-lva1-app6892-thumbnail.jpg?width=640&height=640&fit=bounds)
![Multiband Transceivers - [Chapter 1]](https://cdn.slidesharecdn.com/ss_thumbnails/ch1-150613070932-lva1-app6891-thumbnail.jpg?width=640&height=640&fit=bounds)
![Multiband Transceivers - [Chapter 5] Software-Defined Radios](https://cdn.slidesharecdn.com/ss_thumbnails/ch5-150613070934-lva1-app6892-thumbnail.jpg?width=640&height=640&fit=bounds)
![RF Module Design - [Chapter 1] From Basics to RF Transceivers](https://cdn.slidesharecdn.com/ss_thumbnails/rfch1-150613070344-lva1-app6892-thumbnail.jpg?width=640&height=640&fit=bounds)
![[嵌入式系統] MCS-51 實驗 - 使用 IAR (3)](https://cdn.slidesharecdn.com/ss_thumbnails/mcs51iarpart3-150613071723-lva1-app6892-thumbnail.jpg?width=640&height=640&fit=bounds)
![RF Module Design - [Chapter 7] Voltage-Controlled Oscillator](https://cdn.slidesharecdn.com/ss_thumbnails/rfch7-150613070347-lva1-app6892-thumbnail.jpg?width=640&height=640&fit=bounds)
![RF Module Design - [Chapter 3] Linearity](https://cdn.slidesharecdn.com/ss_thumbnails/rfch3-150613070345-lva1-app6891-thumbnail.jpg?width=640&height=640&fit=bounds)
![Multiband Transceivers - [Chapter 2] Noises and Linearities](https://cdn.slidesharecdn.com/ss_thumbnails/ch2-150613070933-lva1-app6892-thumbnail.jpg?width=640&height=640&fit=bounds)
![Multiband Transceivers - [Chapter 3] Basic Concept of Comm. Systems](https://cdn.slidesharecdn.com/ss_thumbnails/ch3-150613070933-lva1-app6892-thumbnail.jpg?width=640&height=640&fit=bounds)
![RF Module Design - [Chapter 5] Low Noise Amplifier](https://cdn.slidesharecdn.com/ss_thumbnails/rfch5-150613070346-lva1-app6891-thumbnail.jpg?width=640&height=640&fit=bounds)

![RF Module Design - [Chapter 8] Phase-Locked Loops](https://cdn.slidesharecdn.com/ss_thumbnails/rfch8-150613070348-lva1-app6892-thumbnail.jpg?width=640&height=640&fit=bounds)
![RF Module Design - [Chapter 6] Power Amplifier](https://cdn.slidesharecdn.com/ss_thumbnails/rfch6-150613070347-lva1-app6891-thumbnail.jpg?width=640&height=640&fit=bounds)
![Multiband Transceivers - [Chapter 7] Multi-mode/Multi-band GSM/GPRS/TDMA/AMP...](https://cdn.slidesharecdn.com/ss_thumbnails/ch7-150613070936-lva1-app6892-thumbnail.jpg?width=640&height=640&fit=bounds)
![Multiband Transceivers - [Chapter 6] Multi-mode and Multi-band Transceivers](https://cdn.slidesharecdn.com/ss_thumbnails/ch6-150613070935-lva1-app6891-thumbnail.jpg?width=640&height=640&fit=bounds)
![Multiband Transceivers - [Chapter 7] Spec. Table](https://cdn.slidesharecdn.com/ss_thumbnails/ch7table-150613070936-lva1-app6892-thumbnail.jpg?width=640&height=640&fit=bounds)
![Multiband Transceivers - [Chapter 4] Design Parameters of Wireless Radios](https://cdn.slidesharecdn.com/ss_thumbnails/ch4-150613070934-lva1-app6892-thumbnail.jpg?width=640&height=640&fit=bounds)
![射頻電子 - [實驗第四章] 微波濾波器與射頻多工器設計](https://cdn.slidesharecdn.com/ss_thumbnails/e4-150613065110-lva1-app6892-thumbnail.jpg?width=640&height=640&fit=bounds)
![射頻電子 - [實驗第三章] 濾波器設計](https://cdn.slidesharecdn.com/ss_thumbnails/e3-150613065109-lva1-app6891-thumbnail.jpg?width=640&height=640&fit=bounds)


























![Agilent ADS 模擬手冊 [實習3] 壓控振盪器模擬](https://cdn.slidesharecdn.com/ss_thumbnails/3adsosc-150613072819-lva1-app6892-thumbnail.jpg?width=640&height=640&fit=bounds)
![Agilent ADS 模擬手冊 [實習2] 放大器設計](https://cdn.slidesharecdn.com/ss_thumbnails/2adsamp-150613072818-lva1-app6892-thumbnail.jpg?width=640&height=640&fit=bounds)
![Agilent ADS 模擬手冊 [實習1] 基本操作與射頻放大器設計](https://cdn.slidesharecdn.com/ss_thumbnails/1adsbasics-150613072812-lva1-app6891-thumbnail.jpg?width=640&height=640&fit=bounds)
![射頻電子實驗手冊 - [實驗8] 低雜訊放大器模擬](https://cdn.slidesharecdn.com/ss_thumbnails/simlab8-150613072425-lva1-app6891-thumbnail.jpg?width=640&height=640&fit=bounds)
![射頻電子實驗手冊 - [實驗7] 射頻放大器模擬](https://cdn.slidesharecdn.com/ss_thumbnails/simlab7-150613072420-lva1-app6892-thumbnail.jpg?width=640&height=640&fit=bounds)
![射頻電子實驗手冊 [實驗6] 阻抗匹配模擬](https://cdn.slidesharecdn.com/ss_thumbnails/simlab6-150613072411-lva1-app6892-thumbnail.jpg?width=640&height=640&fit=bounds)
![射頻電子實驗手冊 [實驗1 ~ 5] ADS入門, 傳輸線模擬, 直流模擬, 暫態模擬, 交流模擬](https://cdn.slidesharecdn.com/ss_thumbnails/simlab15-150613072411-lva1-app6892-thumbnail.jpg?width=640&height=640&fit=bounds)