Download as PDF, PPTX




![39
D:MySimpSystemhaltargetJC51B
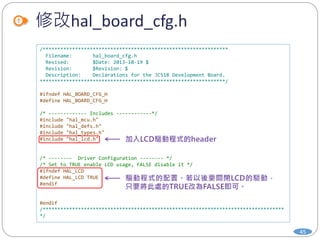
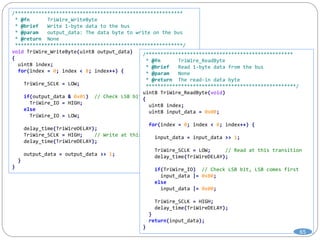
/*********************************************
Filename: hal_lcd.c
Revised: $Date: 2013-10-19 16:21 $
Revision: $Revision: $
Description:
*********************************************/
/******* INCLUDES *******/
#include "hal_board_cfg.h"
#include "hal_defs.h"
#include "hal_types.h"
#include "hal_lcd.h"
/******* CONSTANTS ******/
#define LCD_CMD_FNCT LCD_CMD_FNCT_2 // 8-bits, 2 line
#if (HAL_LCD == TRUE)
/******* LOCAL VARIABLES *********/
char StrL1[]="LCD 1602 Test";
char StrL2[]="Start LCD OK!";
static uint8 LCD_MaxCols;
static uint8 LCD_MaxRows;
// Patterns of horizontal bar
static uint8 LCD_DispBar1[] = {0x10, 0x10, 0x10, 0x10, 0x10, 0x10, 0x10, 0x10};
static uint8 LCD_DispBar2[] = {0x18, 0x18, 0x18, 0x18, 0x18, 0x18, 0x18, 0x18};
static uint8 LCD_DispBar3[] = {0x1C, 0x1C, 0x1C, 0x1C, 0x1C, 0x1C, 0x1C, 0x1C};
static uint8 LCD_DispBar4[] = {0x1E, 0x1E, 0x1E, 0x1E, 0x1E, 0x1E, 0x1E, 0x1E};
static uint8 LCD_DispBar5[] = {0x1F, 0x1F, 0x1F, 0x1F, 0x1F, 0x1F, 0x1F, 0x1F};
/******* FUNCTIONS – API ********/
/**** LOCAL FUNCTIONS *****/
static void LCD_BusyCheck(void);
static void LCD_DataWr(uint8 data);
static void LCD_CmdWr(uint8 cmd);
static void LCD_CursorSet(uint8 row, uint8 col);
#endif
#if (HAL_LCD == TRUE)
…
#endif](https://image.slidesharecdn.com/mcs51iarpart3-150613071723-lva1-app6892/85/MCS-51-IAR-3-39-320.jpg)
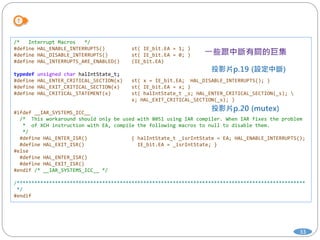
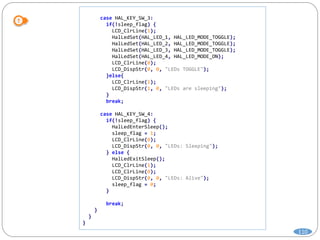
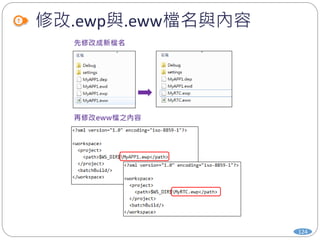
![在進行RTC實驗之前
54
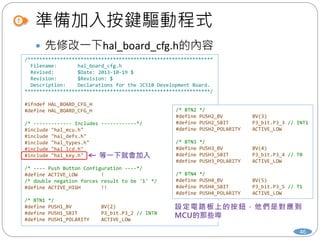
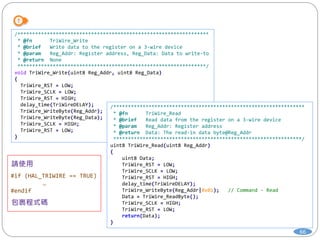
我們現在有按鍵跟LCD驅動程式,何不寫一個應用
程式,完成如exercise4-03.c的進度條顯示程式。
D:MySimpSystemProjectsMyAPP1Source
#include "hal_types.h"
#include "hal_drivers.h"
#include "hal_board_cfg.h"
#include "MyAPP1.h"
void main()
{
uint8 i, percent_bar;
char num[4];
char *str1 = "Dynamic Show";
HalDriverInit();
LCD_DispHorBarInit();
LCD_DispStr(0, 0, str1);
while(1)
{
if (HalKeyRead()==HAL_KEY_SW_1) {
LCD_ClrLine(0);
LCD_ClrLine(1);
for(i=0;i<101;i++)
{
num[0] = (i/100)+0x30;
num[1] = ((i/10)%10)+0x30;
num[2] = (i%10)+0x30;
num[3] = 0x25;
if(num[0]==0x30) {
LCD_DispChar(0, 0, ' ');
if(num[1]==0x30)
LCD_DispChar(0, 1, ' ');
else
LCD_DispChar(0, 1, num[1]);
} else {
LCD_DispChar(0, 0, num[0]);
LCD_DispChar(0, 1, num[1]);
}
LCD_DispChar(0, 2, num[2]);
LCD_DispChar(0, 3, num[3]);
percent_bar = (i*100/125);
LCD_DispHorBar(1, 0, percent_bar);
delayms(200);
}
}
}
}](https://image.slidesharecdn.com/mcs51iarpart3-150613071723-lva1-app6892/85/MCS-51-IAR-3-54-320.jpg)



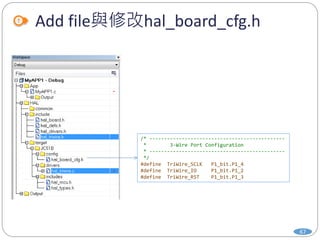
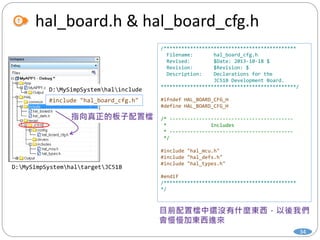
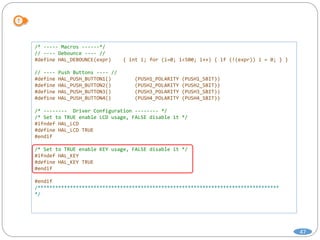
![加入DS1302 RTC驅動程式
/*************************************************************
Filename: hal_ds1302.h
Revised: $Date: 2013-10-18 $
Revision: $Revision: $
Description: This file contains the driver of DS1302 RTC.
*************************************************************/
#ifndef HAL_DS1302_H
#define HAL_DS1302_H
/***** INCLUDES ******/
#include "hal_board.h"
/***** CONSTANTS ******/
// DS1302 Register Address
#define DS1302_SECOND 0x80
#define DS1302_MINUTE 0x82
#define DS1302_HOUR 0x84
#define DS1302_DATE 0x86
#define DS1302_MONTH 0x88
#define DS1302_WEEKDAY 0x8A
#define DS1302_YEAR 0x8C
#define DS1302_WP 0x8E
#define DS1302_TCS 0x90
// DS1302 Register Mask
#define REG_MASK_SECOND 0x70
#define REG_MASK_MINUTE 0x30
#define REG_MASK_HOUR 0x30
#define REG_MASK_DATE 0x30
#define REG_MASK_MONTH 0x10
#define REG_MASK_WEEKDAY 0x00
#define REG_MASK_YEAR 0xF0
#define REG_MASK_HOUR_MODE 0xA0
#define REG_MASK_CH 0x80
// DS1302 Write Protection
#define DS1302_WR_ON 0x00
#define DS1302_WR_OFF 0x80
#define DS1302_START 0x7F
/***** TYPEDEFS ******/
typedef struct __SYSTEMTIME__
{
uint8 Second;
uint8 Minute;
uint8 Hour;
uint8 Hourmode;
uint8 Date;
uint8 Weekday;
uint8 Month;
uint8 Year;
uint8 DateString[11];
uint8 WeekdayString[4];
uint8 TimeString[9];
}SYSTEMTIME;
/***** FUNCTIONS – API ******/
extern void DS1302_Init(void);
extern void DS1302_ReadTime(SYSTEMTIME *Time);
extern void DS1302_WriteTime(SYSTEMTIME *Time);
#endif
73](https://image.slidesharecdn.com/mcs51iarpart3-150613071723-lva1-app6892/85/MCS-51-IAR-3-73-320.jpg)
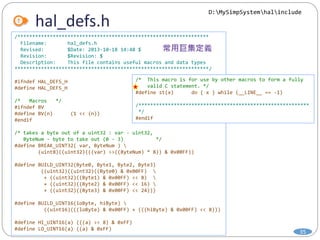
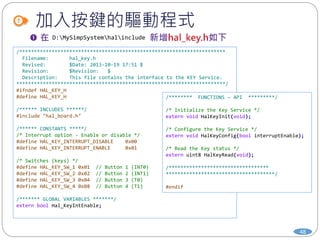
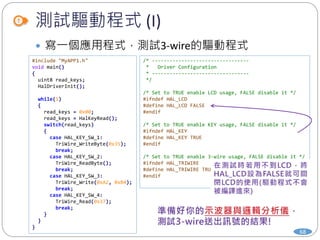
![/********************************************************************
* @fn FormatDec2Reg
* @brief Convert the decimal value in to register data format
* @param dec_data: the decimal value to store
* @return RegValue: the formatted register data
*******************************************************************/
uint8 FormatDec2Reg(uint8 dec_data)
{
uint8 RegValue;
RegValue = (dec_data/10)*16 + dec_data%10;
return(RegValue);
}
/*******************************************************************
* @fn DateToStr
* @brief Convert Date (year, month, date, weekday) into string
* @param *Time: Pointer to the struct of current time
* @return None
******************************************************************/
void DateToStr(SYSTEMTIME *Time)
{
uint8 *WeekdayTable[7] = {"Mon", "Tue", "Wen", "Thu", "Fri", "Sat", "Sun"};
Time->DateString[0] = '2';
Time->DateString[1] = '0';
Time->DateString[2] = Time->Year/10 + 0x30; // '0' : ASCII = 0x30
Time->DateString[3] = Time->Year%10 + 0x30;
Time->DateString[4]='-';
Time->DateString[5] = Time->Month/10 + 0x30;
Time->DateString[6] = Time->Month%10 + 0x30;
Time->DateString[7]='-';
Time->DateString[8] = Time->Date/10 + 0x30;
Time->DateString[9] = Time->Date%10 + 0x30;
Time->DateString[10] = '0';
Time->WeekdayString[0] = *(WeekdayTable[(Time->Weekday%10)-1] + 0);
Time->WeekdayString[1] = *(WeekdayTable[(Time->Weekday%10)-1] + 1);
Time->WeekdayString[2] = *(WeekdayTable[(Time->Weekday%10)-1] + 2);
Time->WeekdayString[3] = '0';
}
77](https://image.slidesharecdn.com/mcs51iarpart3-150613071723-lva1-app6892/85/MCS-51-IAR-3-77-320.jpg)
![78
/*****************************************************************************
* @fn TimeToStr
* @brief Convert Time (hour, minute, second) into string
* @param *Time: Pointer to the struct of current time
* @return None
****************************************************************************/
void TimeToStr(SYSTEMTIME *Time)
{
Time->TimeString[0] = Time->Hour/10 + 0x30; // '0' : ASCII = 0x30
Time->TimeString[1] = Time->Hour%10 + 0x30;
Time->TimeString[2] = ':';
Time->TimeString[3] = Time->Minute/10 + 0x30;
Time->TimeString[4] = Time->Minute%10 + 0x30;
Time->TimeString[6] = Time->Second/10 + 0x30;
Time->TimeString[7] = Time->Second%10 + 0x30;
Time->TimeString[8] = '0';
}
#if (HAL_DS1302 == TRUE)
…
#endif](https://image.slidesharecdn.com/mcs51iarpart3-150613071723-lva1-app6892/85/MCS-51-IAR-3-78-320.jpg)


![DS18B20溫度感測器驅動程式
/***************************************************
Filename: hal_ds18b20.h
Revised: $Date: 2013-11-05 $
Revision: $Revision: $
Description: This file contains the interface
to the ds18b20 temperature sensor.
***************************************************/
#ifndef HAL_DS18B20_H
#define HAL_DS18B20_H
/******* INCLUDES *******/
#include "hal_board.h“
/******* CONSTANTS *******/
// DS18B20 ROM CMDs
#define DS18B20_CMD_SEARCH_ROM 0xF0
#define DS18B20_CMD_READ_ROM 0x33
#define DS18B20_CMD_MATCH_ROM 0x55
#define DS18B20_CMD_SKIP_ROM 0xCC
#define DS18B20_CMD_ALARM_SEARCH 0xEC
// DS18B20 RAM CMDs
#define DS18B20_CMD_CONVERT_TEMP 0x44
#define DS18B20_CMD_READ_SCRATCH 0xBE
#define DS18B20_CMD_WRITE_SCRATCH 0x4E
#define DS18B20_CMD_COPY_SCRATCH 0x48
#define DS18B20_CMD_RECALL_EPROM 0xB8
#define DS18B20_CMD_READ_PSUPPLY 0xB4
// DS18B20 Resolution
#define DS18B20_RES_9BITS 0x1F
#define DS18B20_RES_10BITS 0x3F
#define DS18B20_RES_11BITS 0x5F
#define DS18B20_RES_12BITS 0x7F
#define DS18B20_CONV_TIME 752
/******* TYPEDEFS *******/
typedef struct __TEMPCONFIG__
{
// 2's complement, +85C = 0101, 0101 = 0x55
uint8 Alarm_TH;
// 2's complement, -10C = 1111, 0110 = 0xF6
uint8 Alarm_TL;
uint8 Resolution;
}TEMPCONFIG;
typedef struct __SENSEDTEMP__
{
bool Temp_Sign;
uint8 Temp_Integer;
uint8 Temp_Decimal;
uint8 Resolution;
char TempString[8];
}SENSEDTEMP;
/******* FUNCTIONS - API *******/
extern void DS18B20_Init(void);
extern void DS18B20_ReadTemp(SENSEDTEMP *ttemp);
extern void DS18B20_Config(TEMPCONFIG *tconfig);
#endif
92](https://image.slidesharecdn.com/mcs51iarpart3-150613071723-lva1-app6892/85/MCS-51-IAR-3-92-320.jpg)
![95
// String construction
if(temp_sign) ttemp->TempString[0] = '-';
else ttemp->TempString[0] = ' ';
if((ttemp->Temp_Integer)/100) { // hundred's digit
ttemp->TempString[1] = ((ttemp->Temp_Integer)/100) + '0';
}else{
if(temp_sign) {
ttemp->TempString[0] = ' ';
ttemp->TempString[1] = '-';
}else{
ttemp->TempString[1] = ' ';
}
}
if(((ttemp->Temp_Integer)%100)/10) { // ten's digit
ttemp->TempString[2] = (((ttemp->Temp_Integer)%100)/10) + '0';
}else{
if(temp_sign) {
ttemp->TempString[1] = ' ';
ttemp->TempString[2] = '-';
}else{
ttemp->TempString[2] = ' ';
}
}
ttemp->TempString[3] = ((ttemp->Temp_Integer)%10) + '0';
ttemp->TempString[4] = '.';
ttemp->TempString[5] = (ttemp->Temp_Decimal*625/1000) + '0';
ttemp->TempString[6] = 'C';
ttemp->TempString[7] = '0';
}](https://image.slidesharecdn.com/mcs51iarpart3-150613071723-lva1-app6892/85/MCS-51-IAR-3-95-320.jpg)

![113
/***********************************************************************
Filename: hal_timer.c
Revised: $Date: 2013-11-11 $
Revision: $Revision: $
Description: This file contains the interface to the Timer Service.
Just for demo, Timer2 is not implemented
************************************************************************/
/******** INCLUDES ********/
#include "hal_mcu.h"
#include "hal_defs.h"
#include "hal_types.h"
#include "hal_timer.h"
#include "hal_led.h"
/******** CONSTANTS ********/
// IE BV
#define IE_T0_IntEn_Bit BV(1)
#define IE_T1_IntEn_Bit BV(3)
// IF BV@TCON
#define TCON_T0_IntFlag_Bit BV(5)
#define TCON_T1_IntFlag_Bit BV(7)
// Timer Enable BV@TCON
#define TCON_T0_START_BV BV(4)
#define TCON_T1_START_BV BV(6)
/* Prescale settings and Clock settings */
#define HAL_TIMER_PRESCALE_VAL 12
#define HAL_TIMER_12MHZ 12
/* ISR Vector names */
#define T0_VECTOR timer0
#define T1_VECTOR timer1
/* Opmode Mask */
#define OP_MODE_MASK 0x03 // for checking mode0, 1, 2, 3
/******** TYPEDEFS ********/
typedef struct
{
bool configured;
bool intEnable;
uint8 opMode;
uint8 prescaleVal;
uint8 clock;
uint8 TH;
uint8 TL;
halTimerCBack_t callBackFunc;
} halTimerSettings_t;
/******** GLOBAL VARIABLES ********/
static halTimerSettings_t halTimerRecord[HAL_TIMER_MAX];
/******** FUNCTIONS – Local ********/
uint8 halTimerSetOpMode (uint8 timerId, uint8 opMode);
uint8 halTimerSetCount (uint8 timerId, uint16 timePerTick);
void halTimerSendCallBack (uint8 timerId);
void halProcessTimer0 (void);
void halProcessTimer1 (void);
void halProcessTimer2 (void);](https://image.slidesharecdn.com/mcs51iarpart3-150613071723-lva1-app6892/85/MCS-51-IAR-3-113-320.jpg)
![/***************************************************************************************************
* @fn HalTimerConfig
* @brief Configure the Timer Serivce
* @param timerId - Id of the timer, opMode - Operation mode, cBack - Pointer to callback function
* @return Status of the configuration
***************************************************************************************************/
uint8 HalTimerConfig (uint8 timerId, uint8 opMode, bool intEnable, halTimerCBack_t cBack)
{
if (timerId < HAL_TIMER_MAX) {
halTimerRecord[timerId].configured = TRUE;
halTimerRecord[timerId].opMode = opMode;
halTimerRecord[timerId].intEnable = intEnable;
halTimerRecord[timerId].TH = 0;
halTimerRecord[timerId].TL = 0;
halTimerRecord[timerId].callBackFunc = cBack;
} else {
return HAL_TIMER_PARAMS_ERROR;
}
return HAL_TIMER_OK;
}
/******** FUNCTIONS – API ********/
/*******************************************************************
* @fn HalTimerInit
* @brief Initialize Timer Service
* @param None
* @return None
*******************************************************************/
void HalTimerInit (void)
{ // disable all timer interrupts
IE &= ~(IE_T0_IntEn_Bit|IE_T1_IntEn_Bit);
/* Setup prescale value & clock for timer */
halTimerRecord[HAL_TIMER_0].clock = HAL_TIMER_12MHZ;
halTimerRecord[HAL_TIMER_0].prescaleVal = HAL_TIMER_PRESCALE_VAL;
halTimerRecord[HAL_TIMER_1].clock = HAL_TIMER_12MHZ;
halTimerRecord[HAL_TIMER_1].prescaleVal = HAL_TIMER_PRESCALE_VAL;
}
114](https://image.slidesharecdn.com/mcs51iarpart3-150613071723-lva1-app6892/85/MCS-51-IAR-3-114-320.jpg)
![/*************************************************************************************************
* @fn HalTimerStart
* @brief Start the Timer Service
* @param timerId - ID of the timer
* timerPerTick - number of micro sec per tick, (ticks x prescale) / clock = usec/tick
* @return Status - OK or Not OK
*************************************************************************************************/
uint8 HalTimerStart (uint8 timerId, uint16 timePerTick)
{
if (halTimerRecord[timerId].configured) {
halTimerSetOpMode (timerId, halTimerRecord[timerId].opMode);
halTimerSetCount (timerId, timePerTick);
HalTimerInterruptEnable(timerId, halTimerRecord[timerId].intEnable);
if (timerId == HAL_TIMER_0) TCON |= TCON_T0_START_BV;
if (timerId == HAL_TIMER_1) TCON |= TCON_T1_START_BV;
} else {
return HAL_TIMER_NOT_CONFIGURED;
}
return HAL_TIMER_OK;
}
/***************************************************
* @fn HalTimerStop
* @brief Stop the Timer Service
* @param timerId - ID of the timer
* @return Status - OK or Not OK
**************************************************/
uint8 HalTimerStop (uint8 timerId)
{
switch(timerId)
{
case HAL_TIMER_0:
TCON &= ~(TCON_T0_START_BV); break;
case HAL_TIMER_1:
TCON &= ~(TCON_T1_START_BV); break;
default:
return HAL_TIMER_INVALID_ID;
}
return HAL_TIMER_OK;
} 115](https://image.slidesharecdn.com/mcs51iarpart3-150613071723-lva1-app6892/85/MCS-51-IAR-3-115-320.jpg)
![/***************************************************************************************************
* @fn halTimerSetCount
* @brief
* @param timerId - ID of the timer
* timerPerTick - Number micro sec per ticks
* @return Status - OK or Not OK
***************************************************************************************************/
uint8 halTimerSetCount (uint8 timerId, uint16 timePerTick)
{
uint16 count;
uint8 high_byte, low_byte;
/* Load count = ((sec/tick) x clock) / prescale */
//count = (uint16) (timePerTick*(halTimerRecord[timerId].prescaleVal)/halTimerRecord[timerId].clock);
count = (uint16) (timePerTick);
switch(halTimerRecord[timerId].opMode&OP_MODE_MASK)
{
case HAL_TIMER_MODE_13BITS:
count = (8192 - count);
high_byte = (uint8) (count >> 5);
low_byte = (uint8) (count & 0x07);
break;
case HAL_TIMER_MODE_16BITS:
count = (65536 - count);
high_byte = (uint8) (count >> 8);
low_byte = (uint8) (count & 0x0F);
break;
case HAL_TIMER_MODE_8BITS_AUTO:
count = (256 - (uint8) count);
high_byte = (uint8) count;
low_byte = high_byte ;
break;
case HAL_TIMER_MODE_8BITS_SPLIT:
count = (256 - (uint8) count);
high_byte = (uint8) (count & 0x0F);
low_byte = high_byte ;
break;
default:
break;
}
halTimerRecord[timerId].TH = high_byte;
halTimerRecord[timerId].TL = low_byte;
switch(timerId)
{
case HAL_TIMER_0:
TH0 = halTimerRecord[timerId].TH;
TL0 = halTimerRecord[timerId].TL;
break;
case HAL_TIMER_1:
TH1 = halTimerRecord[timerId].TH;
TL1 = halTimerRecord[timerId].TL;
break;
default:
return HAL_TIMER_INVALID_ID;
}
return HAL_TIMER_OK;
}
116](https://image.slidesharecdn.com/mcs51iarpart3-150613071723-lva1-app6892/85/MCS-51-IAR-3-116-320.jpg)
![/*******************************************************
* @fn halTimerSetOpMode
* @brief Setup operate modes
* @param timerId - ID of the timer
* opMode - operation mode of the timer
* @return Status - OK or Not OK
*******************************************************/
uint8 halTimerSetOpMode (uint8 timerId, uint8 opMode)
{
switch (timerId)
{
case HAL_TIMER_0:
TMOD &= ~(0x0F);
TMOD |= opMode;
break;
case HAL_TIMER_1:
TMOD &= ~(0xF0);
TMOD |= (opMode<<4);
break;
default:
return HAL_TIMER_INVALID_ID;
}
return HAL_TIMER_OK;
}
/************************************************************
* @fn HalTimerInterruptEnable
* @brief Setup interrupt enable
* @param timerId - ID of the timer
* enable - TRUE or FALSE
* @return Status - OK or Not OK
************************************************************/
uint8 HalTimerInterruptEnable (uint8 timerId, bool enable)
{
switch(timerId)
{
case HAL_TIMER_0:
if (halTimerRecord[timerId].intEnable) IE |= IE_T0_IntEn_Bit;
else IE &= ~(IE_T0_IntEn_Bit);
break;
case HAL_TIMER_1:
if (halTimerRecord[timerId].intEnable) IE |= IE_T1_IntEn_Bit;
else IE &= ~(IE_T1_IntEn_Bit);
break;
default:
return HAL_TIMER_INVALID_ID;
}
return HAL_TIMER_OK;
}
117](https://image.slidesharecdn.com/mcs51iarpart3-150613071723-lva1-app6892/85/MCS-51-IAR-3-117-320.jpg)
![118
/******************************************************
* @fn halTimerSendCallBack
* @brief Send Callback back to the caller
* @param timerId - ID of the timer
* @return None
******************************************************/
void halTimerSendCallBack (uint8 timerId)
{
if (halTimerRecord[timerId].callBackFunc)
(halTimerRecord[timerId].callBackFunc) (timerId);
}
/*******************************************
* @fn halProcessTimer0
* @brief Processes Timer 0 Events.
******************************************/
void halProcessTimer0 (void)
{
TCON &= ~(TCON_T0_IntFlag_Bit);
TH0 = halTimerRecord[HAL_TIMER_0].TH;
TL0 = halTimerRecord[HAL_TIMER_0].TL;
halTimerSendCallBack(HAL_TIMER_0);
}
/******************************************
* @fn halProcessTimer1
* @brief Processes Timer 1 Events.
*****************************************/
void halProcessTimer1 (void)
{
TCON &= ~(TCON_T1_IntFlag_Bit);
TH1 = halTimerRecord[HAL_TIMER_1].TH;
TL1 = halTimerRecord[HAL_TIMER_1].TL;
halTimerSendCallBack(HAL_TIMER_1);
}
/****** INTERRUPT SERVICE ROUTINE ******/
/***************************************
* @fn halTimer0Isr
* @brief Timer 0 ISR
**************************************/
HAL_ISR_FUNCTION( halTimer0Isr, T0_VECTOR )
{
halProcessTimer0();
}
/***************************************
* @fn halTimer1Isr
* @brief Timer 1 ISR
**************************************/
HAL_ISR_FUNCTION( halTimer1Isr, T1_VECTOR )
{
halProcessTimer1();
}
/***************************************
***************************************/
#if (HAL_TIMER == TRUE)
…
#endif](https://image.slidesharecdn.com/mcs51iarpart3-150613071723-lva1-app6892/85/MCS-51-IAR-3-118-320.jpg)

This document discusses the DS1302 real-time clock chip, detailing its features, such as timekeeping capabilities and dual power supply options. It outlines practical exercises to create an electronic clock that displays date and time on an LCD, emphasizing program structuring and driver integration. Various embedded programming design patterns and structures are described to aid in the development of applications using the DS1302 and LCD components.

![[嵌入式系統] MCS-51 實驗 - 使用 IAR (1)](https://cdn.slidesharecdn.com/ss_thumbnails/mcs51iarpart1-150613071712-lva1-app6892-thumbnail.jpg?width=640&height=640&fit=bounds)

























![RF Module Design - [Chapter 8] Phase-Locked Loops](https://cdn.slidesharecdn.com/ss_thumbnails/rfch8-150613070348-lva1-app6892-thumbnail.jpg?width=640&height=640&fit=bounds)
![RF Module Design - [Chapter 1] From Basics to RF Transceivers](https://cdn.slidesharecdn.com/ss_thumbnails/rfch1-150613070344-lva1-app6892-thumbnail.jpg?width=640&height=640&fit=bounds)
![Multiband Transceivers - [Chapter 1]](https://cdn.slidesharecdn.com/ss_thumbnails/ch1-150613070932-lva1-app6891-thumbnail.jpg?width=640&height=640&fit=bounds)
![RF Module Design - [Chapter 2] Noises](https://cdn.slidesharecdn.com/ss_thumbnails/rfch2-150613070344-lva1-app6892-thumbnail.jpg?width=640&height=640&fit=bounds)
![Multiband Transceivers - [Chapter 5] Software-Defined Radios](https://cdn.slidesharecdn.com/ss_thumbnails/ch5-150613070934-lva1-app6892-thumbnail.jpg?width=640&height=640&fit=bounds)
![RF Module Design - [Chapter 7] Voltage-Controlled Oscillator](https://cdn.slidesharecdn.com/ss_thumbnails/rfch7-150613070347-lva1-app6892-thumbnail.jpg?width=640&height=640&fit=bounds)
![Multiband Transceivers - [Chapter 3] Basic Concept of Comm. Systems](https://cdn.slidesharecdn.com/ss_thumbnails/ch3-150613070933-lva1-app6892-thumbnail.jpg?width=640&height=640&fit=bounds)
![[ZigBee 嵌入式系統] ZigBee 應用實作 - 使用 TI Z-Stack Firmware](https://cdn.slidesharecdn.com/ss_thumbnails/zigbeeappimplementation-150613072040-lva1-app6891-thumbnail.jpg?width=640&height=640&fit=bounds)
![RF Module Design - [Chapter 5] Low Noise Amplifier](https://cdn.slidesharecdn.com/ss_thumbnails/rfch5-150613070346-lva1-app6891-thumbnail.jpg?width=640&height=640&fit=bounds)
![Multiband Transceivers - [Chapter 2] Noises and Linearities](https://cdn.slidesharecdn.com/ss_thumbnails/ch2-150613070933-lva1-app6892-thumbnail.jpg?width=640&height=640&fit=bounds)
![[嵌入式系統] MCS-51 實驗 - 使用 IAR (2)](https://cdn.slidesharecdn.com/ss_thumbnails/mcs51iarpart2-150613071717-lva1-app6891-thumbnail.jpg?width=640&height=640&fit=bounds)
![RF Module Design - [Chapter 3] Linearity](https://cdn.slidesharecdn.com/ss_thumbnails/rfch3-150613070345-lva1-app6891-thumbnail.jpg?width=640&height=640&fit=bounds)

![[嵌入式系統] 嵌入式系統進階](https://cdn.slidesharecdn.com/ss_thumbnails/advembedded-150613071653-lva1-app6892-thumbnail.jpg?width=640&height=640&fit=bounds)
![RF Module Design - [Chapter 4] Transceiver Architecture](https://cdn.slidesharecdn.com/ss_thumbnails/rfch4-150613070346-lva1-app6891-thumbnail.jpg?width=640&height=640&fit=bounds)
![RF Module Design - [Chapter 6] Power Amplifier](https://cdn.slidesharecdn.com/ss_thumbnails/rfch6-150613070347-lva1-app6891-thumbnail.jpg?width=640&height=640&fit=bounds)
![[ZigBee 嵌入式系統] ZigBee Architecture 與 TI Z-Stack Firmware](https://cdn.slidesharecdn.com/ss_thumbnails/zigbeearchitecture-150613072045-lva1-app6892-thumbnail.jpg?width=640&height=640&fit=bounds)
![Multiband Transceivers - [Chapter 7] Multi-mode/Multi-band GSM/GPRS/TDMA/AMP...](https://cdn.slidesharecdn.com/ss_thumbnails/ch7-150613070936-lva1-app6892-thumbnail.jpg?width=640&height=640&fit=bounds)
![Multiband Transceivers - [Chapter 7] Spec. Table](https://cdn.slidesharecdn.com/ss_thumbnails/ch7table-150613070936-lva1-app6892-thumbnail.jpg?width=640&height=640&fit=bounds)
![Multiband Transceivers - [Chapter 6] Multi-mode and Multi-band Transceivers](https://cdn.slidesharecdn.com/ss_thumbnails/ch6-150613070935-lva1-app6891-thumbnail.jpg?width=640&height=640&fit=bounds)














![Eee iv-microcontrollers [10 es42]-assignment](https://cdn.slidesharecdn.com/ss_thumbnails/eee-iv-microcontrollers10es42-assignment-190903091039-thumbnail.jpg?width=640&height=640&fit=bounds)









![Agilent ADS 模擬手冊 [實習3] 壓控振盪器模擬](https://cdn.slidesharecdn.com/ss_thumbnails/3adsosc-150613072819-lva1-app6892-thumbnail.jpg?width=640&height=640&fit=bounds)
![Agilent ADS 模擬手冊 [實習2] 放大器設計](https://cdn.slidesharecdn.com/ss_thumbnails/2adsamp-150613072818-lva1-app6892-thumbnail.jpg?width=640&height=640&fit=bounds)
![Agilent ADS 模擬手冊 [實習1] 基本操作與射頻放大器設計](https://cdn.slidesharecdn.com/ss_thumbnails/1adsbasics-150613072812-lva1-app6891-thumbnail.jpg?width=640&height=640&fit=bounds)
![射頻電子實驗手冊 - [實驗8] 低雜訊放大器模擬](https://cdn.slidesharecdn.com/ss_thumbnails/simlab8-150613072425-lva1-app6891-thumbnail.jpg?width=640&height=640&fit=bounds)
![射頻電子實驗手冊 - [實驗7] 射頻放大器模擬](https://cdn.slidesharecdn.com/ss_thumbnails/simlab7-150613072420-lva1-app6892-thumbnail.jpg?width=640&height=640&fit=bounds)
![射頻電子實驗手冊 [實驗6] 阻抗匹配模擬](https://cdn.slidesharecdn.com/ss_thumbnails/simlab6-150613072411-lva1-app6892-thumbnail.jpg?width=640&height=640&fit=bounds)
![射頻電子實驗手冊 [實驗1 ~ 5] ADS入門, 傳輸線模擬, 直流模擬, 暫態模擬, 交流模擬](https://cdn.slidesharecdn.com/ss_thumbnails/simlab15-150613072411-lva1-app6892-thumbnail.jpg?width=640&height=640&fit=bounds)
![Multiband Transceivers - [Chapter 4] Design Parameters of Wireless Radios](https://cdn.slidesharecdn.com/ss_thumbnails/ch4-150613070934-lva1-app6892-thumbnail.jpg?width=640&height=640&fit=bounds)



















