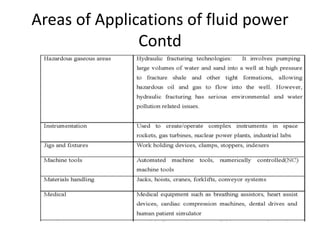
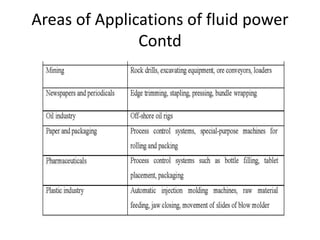
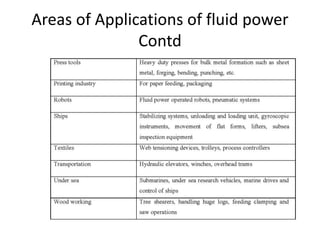
This document provides an overview of a course on Fluid Power Systems. The course covers topics such as flow through pipes and fittings, analysis of pipe networks, fluid power components and circuits, design of fluid power systems, and properties of hydraulic fluids. It includes relevant textbooks and the contents of the first chapter on introductions to fluid power systems, which defines fluid power systems, classifications of applications, advantages, basic components of hydraulic and pneumatic systems, and their operation. Comparisons are made between hydraulic and pneumatic systems as well as hydraulic systems and electrical systems.