Download to read offline
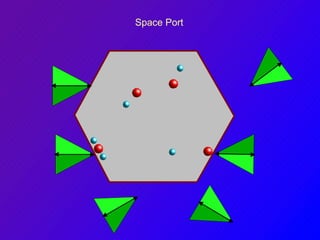
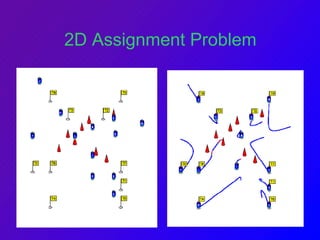

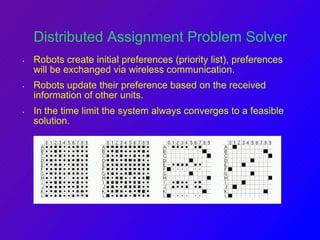

This document discusses a proposed system for self-organized control of manned and unmanned vehicles in space colonies. It would use a distributed assignment problem solver where vehicles select destinations and schedules emerge through wireless communication and preference updating between vehicles. This approach is more adaptable and resilient than centralized control. The goals are to develop simulation programs to test the system under different conditions and identify scenarios to design simulations for system evaluation.
























































![Wassersug richard[1]](https://cdn.slidesharecdn.com/ss_thumbnails/wassersugrichard1-140914105156-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)