Download to read offline
![Problem
● Our focus
– People who rely on a feeding staff
● In home, school, hospital, etc.
● Need
– Inhibiting situations
● Illness, cognitive challenges, paralysis, gross motor
control, etc.
– “785 million people have a physical and or mental
disability” [1].](https://image.slidesharecdn.com/midreviewpresentation-130131104758-phpapp02/75/Mid-review-presentation-3-2048.jpg)


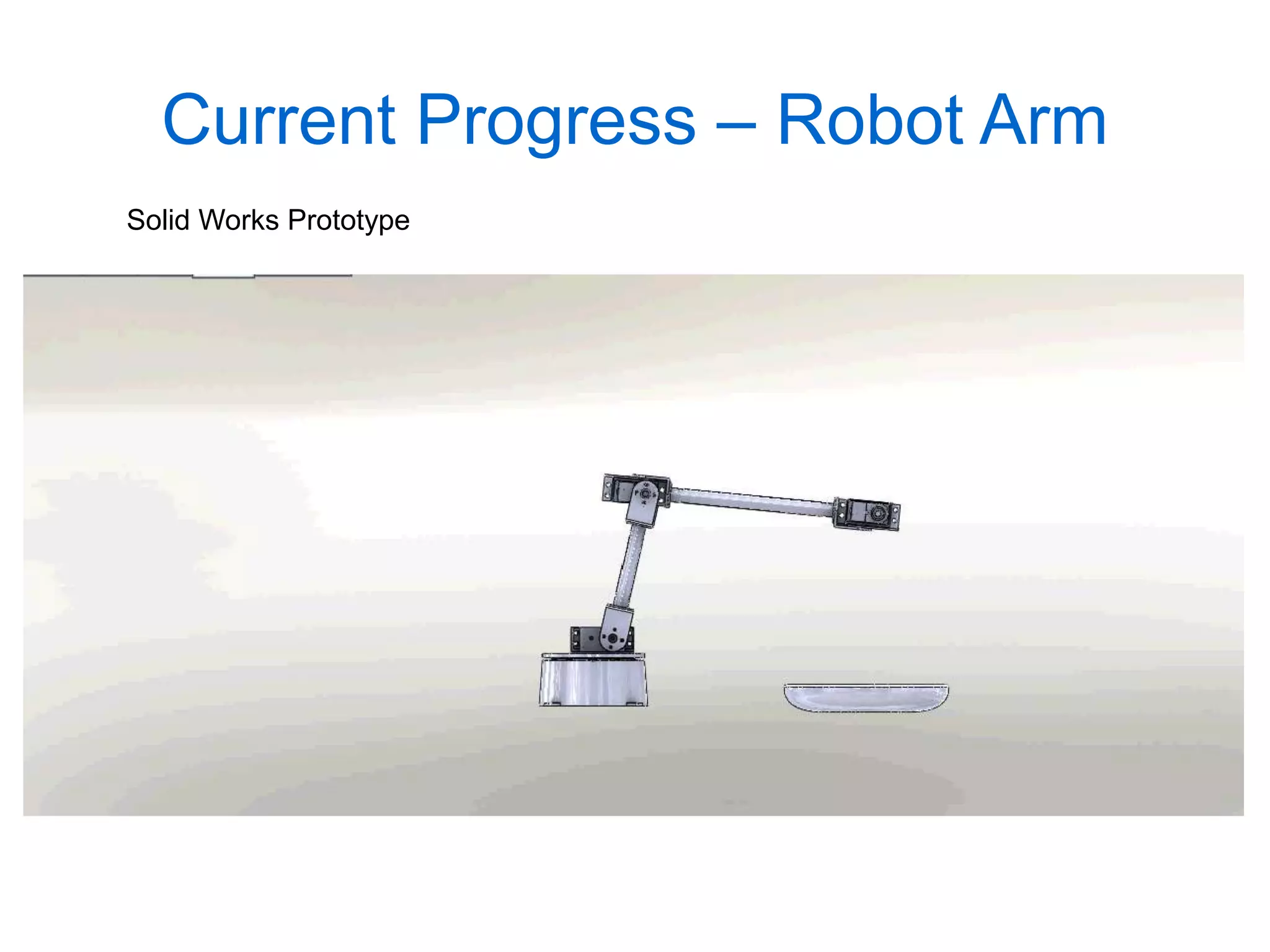
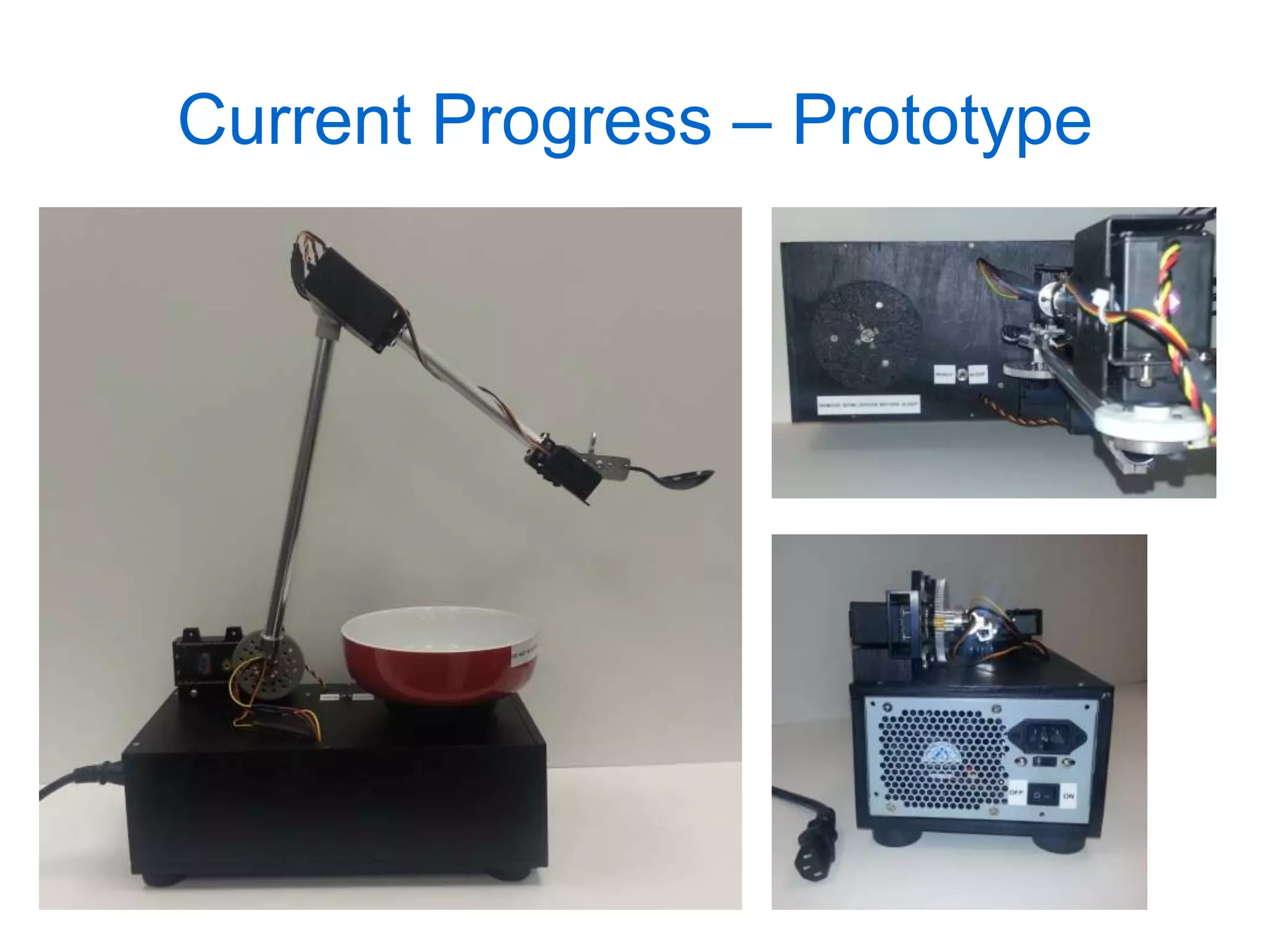
![Current Progress – Robot Arm
● Motors
– 5 DC Servo Motors
● λ1+θ1: SPG785A and Top Mount (7:1)
● θ2: HS-805BB Mega Power Servo
● θ3: HS-322HD Standard Deluxe Servo
● Bowl: HS-1425CR (Continuous Rotation) Servo
SPG785A Top Mount [2] HS-805BB [3]](https://image.slidesharecdn.com/midreviewpresentation-130131104758-phpapp02/75/Mid-review-presentation-10-2048.jpg)
![Current Progress - Sensors
● Proximity Infrared Sensors
– Obstacle avoidance
– Sharp GP2D120XJ00F
● Range: 3cm to 30cm
Sharp Proximity Sensor [4].
● Analog output](https://image.slidesharecdn.com/midreviewpresentation-130131104758-phpapp02/75/Mid-review-presentation-11-2048.jpg)
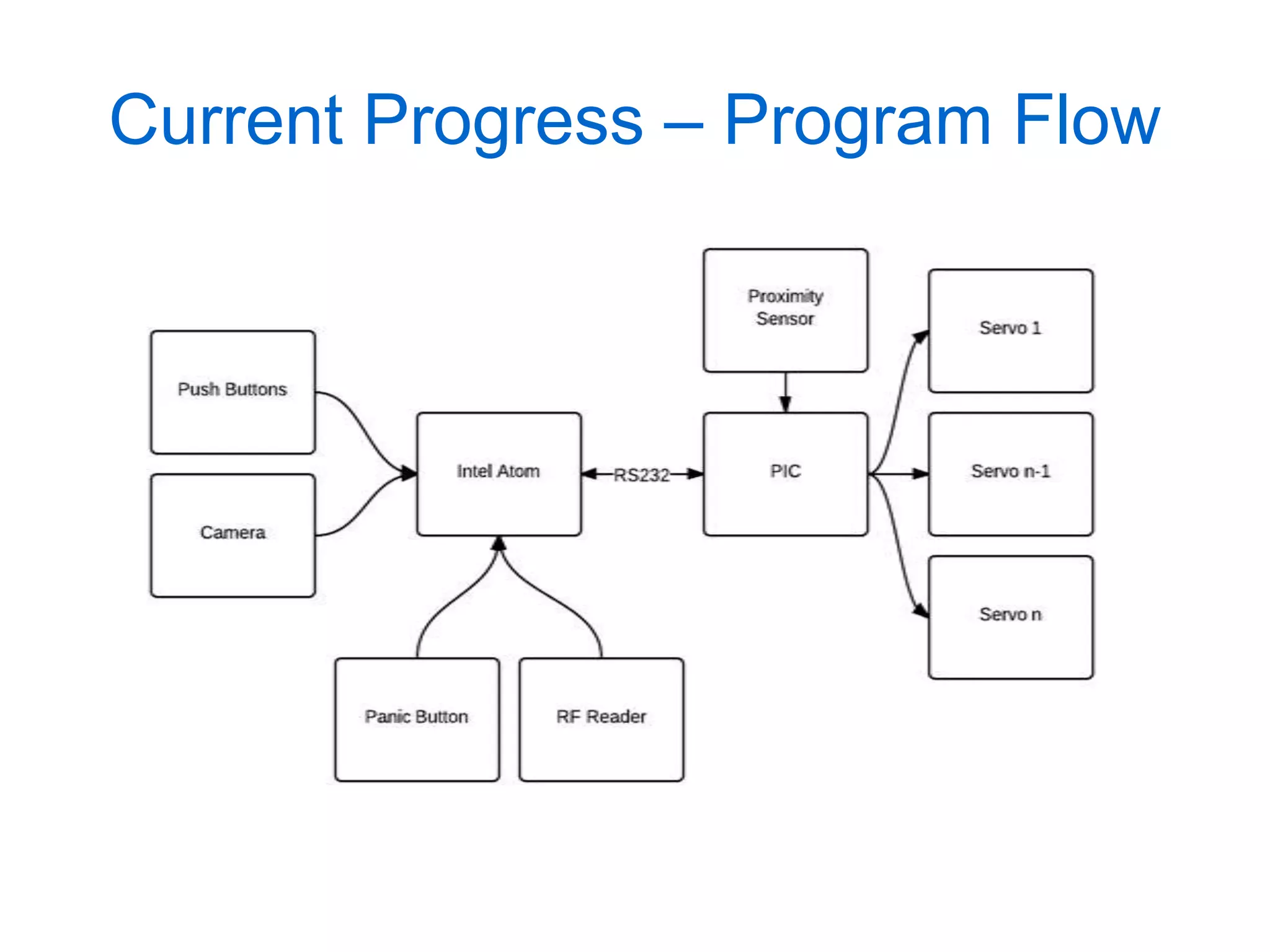
![Current Progress - Control
● Microprocessor
– 5 ADC pins for proximity sensors
– 5 16-bit Timer registers for PWM output
● PWM 16 bit resolution
– DIP package
● PIC32MX series
● PIC24FJ series
Microprocessor 40-DIP package [5].](https://image.slidesharecdn.com/midreviewpresentation-130131104758-phpapp02/75/Mid-review-presentation-12-2048.jpg)
![Key Features – User Interface
● Open Source Computer Vision
– Facial recognition [6]
– Head movement](https://image.slidesharecdn.com/midreviewpresentation-130131104758-phpapp02/75/Mid-review-presentation-19-2048.jpg)


![References
[1] Report: 15 percent of world population is disabled. [Online]. Available:
http://www.washingtonpost.com/national/report-15-percent-of-world-population-is-
disabled/2011/06/09/AGZcqBNH_story.html
[2] SPG785A Top Mount. [Online] Available:
http://www.servocity.com/html/spg785a_top_mount.html
[3] HS-805BB Giant Scale Servo Motor. [Online] Available:
http://www.robotshop.com/hitec-hs805BB-servo-motor.html
[4] Infrared Proximity Sensor Short Range - Sharp GP2D120XJ00F. [Online]. Available:
https://www.sparkfun.com/products/8959
[5] PIC Microcontroller. [Online]. Available:
http://media.digikey.com/Photos/Microchip%20Tech%20Photos/PIC18LF44K22-
I%5EP.jpg
[6] OpenCV. [Online]. Available: http://opencv.org/wp-
content/themes/opencv/images/logo.png](https://image.slidesharecdn.com/midreviewpresentation-130131104758-phpapp02/75/Mid-review-presentation-30-2048.jpg)

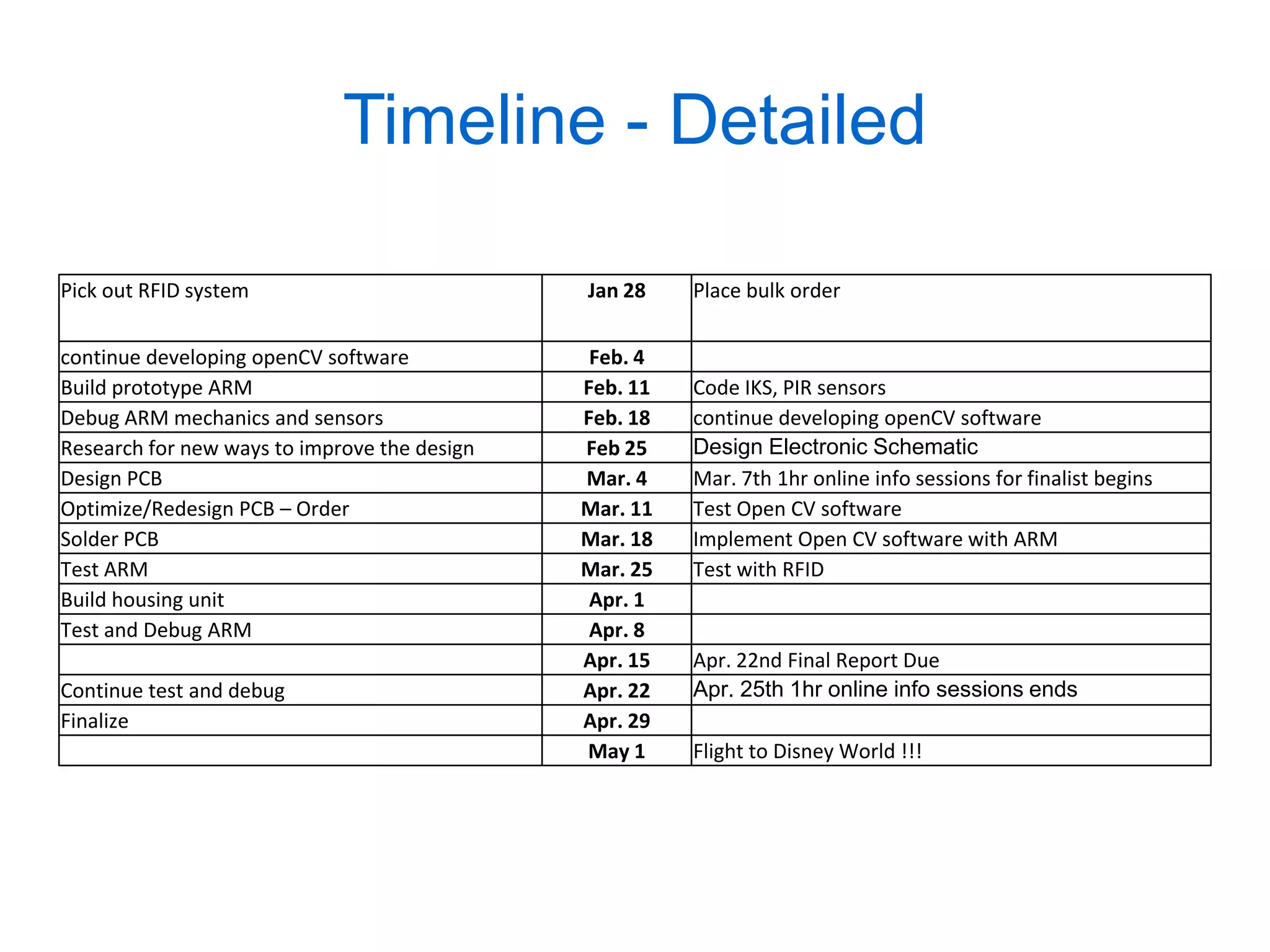
The document proposes the design of an autonomous robotic manipulator to assist people who cannot feed themselves. It describes the problem of people with disabilities requiring feeding assistance. The proposed solution is a robotic feeding arm that can be controlled independently. The current progress includes developing the schematic, prototype, and programming. Key features include safety measures like RFID and sensors, inverse kinematics for positioning, and multiple user interface options. Performance measures and timelines/budgets are provided to evaluate and plan the project. Next steps involve further programming, electronics design, and housing development.


























