Downloaded 177 times

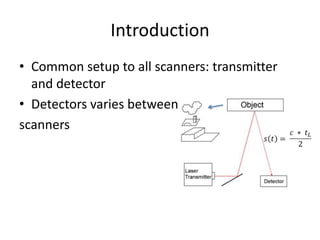
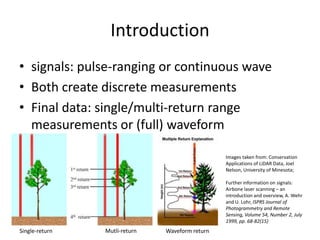
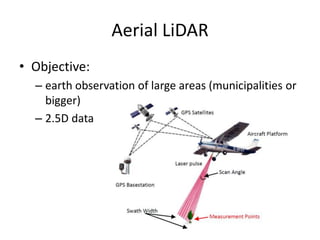
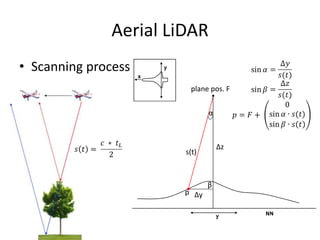
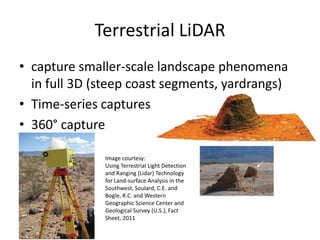

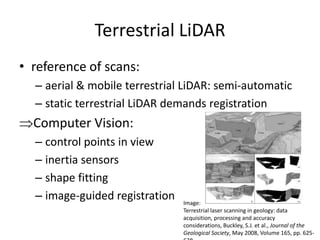
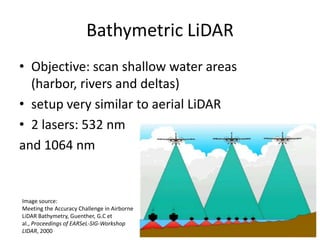
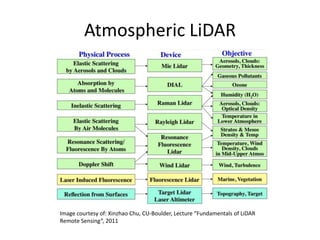

This document provides an overview of different types of LiDAR acquisition methods. Aerial LiDAR is used to capture large areas and generates 2.5D data by scanning from aircraft. Terrestrial LiDAR captures smaller areas in full 3D using static or mobile ground-based units. Bathymetric LiDAR maps shallow underwater areas using dual lasers. Atmospheric LiDAR surveys air properties by transmitting laser pulses and analyzing backscatter. Common to all is using a laser transmitter and detector to measure discrete points or full waveforms, with variations depending on the objective and environment.