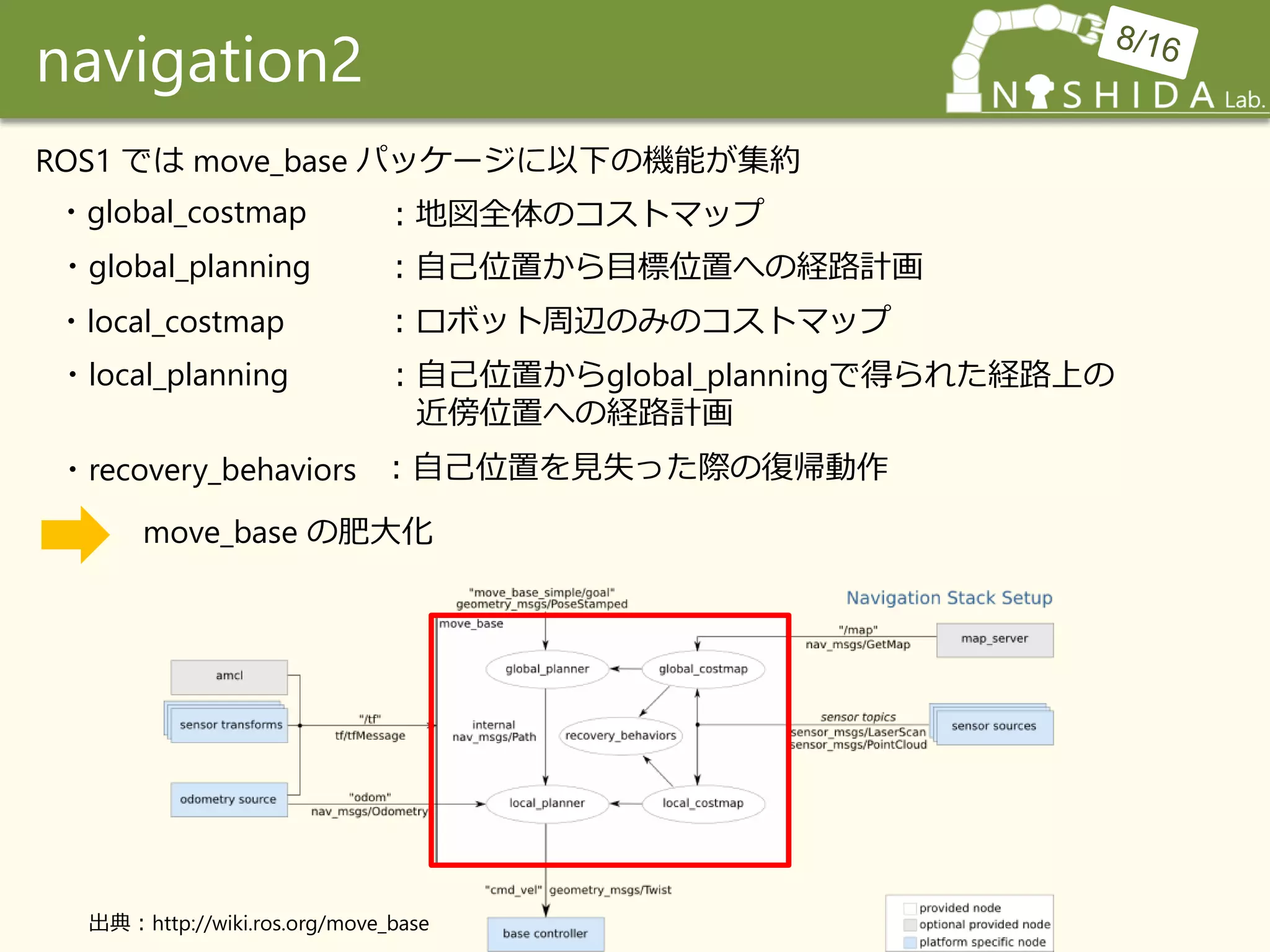
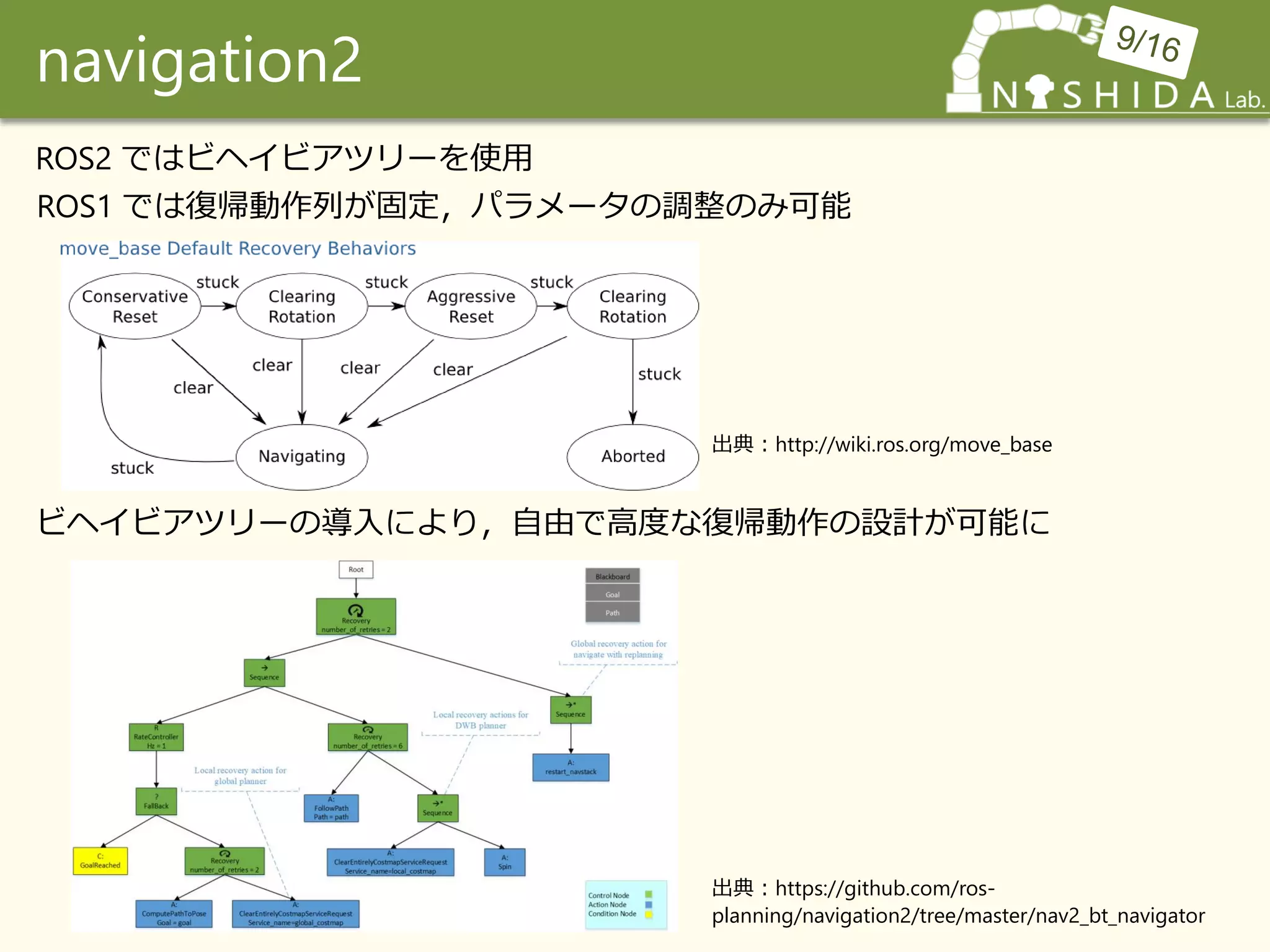
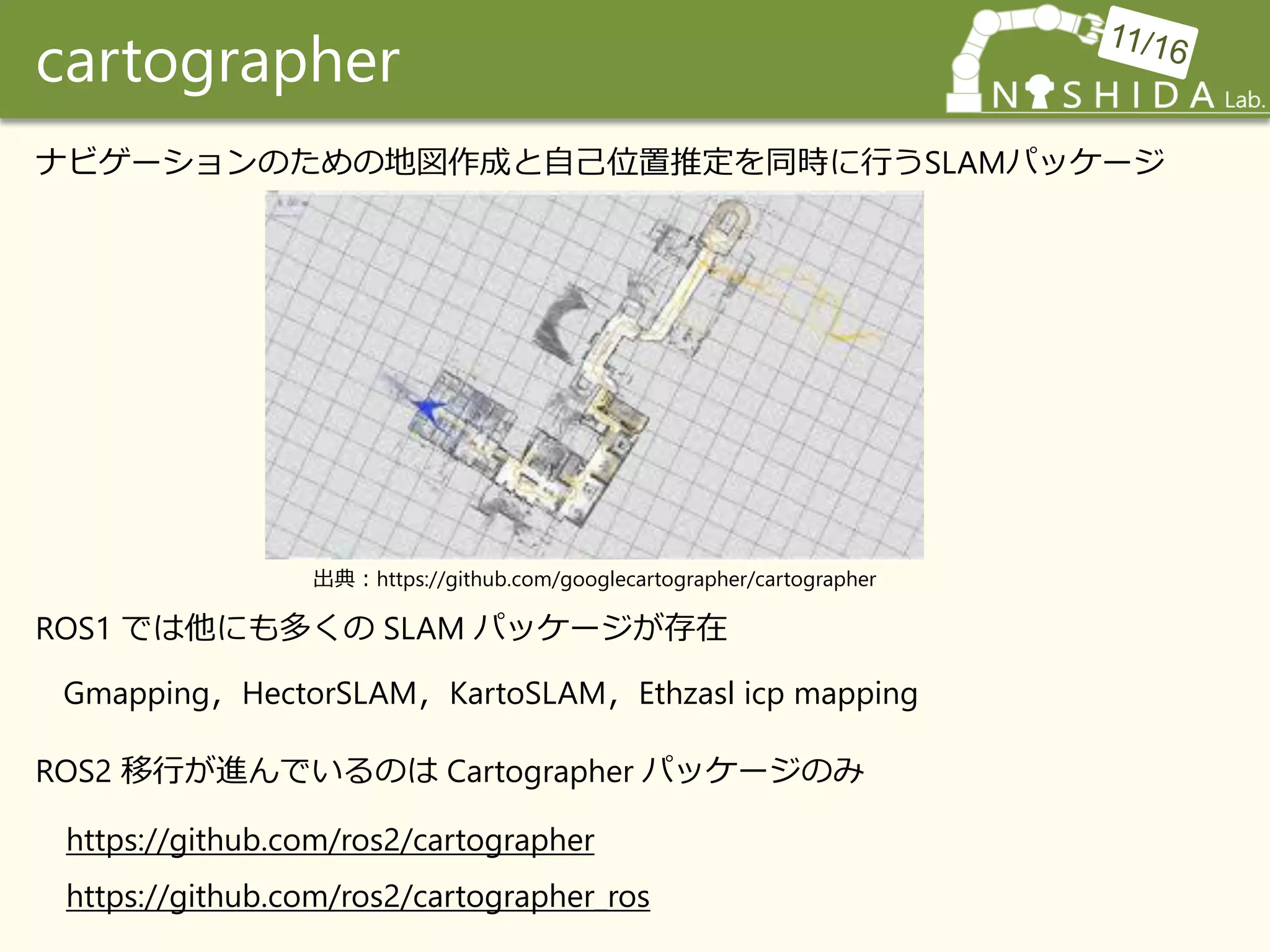
ROS2勉強合宿 @別府温泉での輪講資料 6人目 「第5.1節-第5.7節 ROS2に対応したツール/パッケージ」 - rosbag2 - rviz2 - ros2_intel_realsense - navigation2 - cartgrapher - moveit2 - Gazebo - Ignition Acropolis
























![SSII2021 [TS1] Visual SLAM ~カメラ幾何の基礎から最近の技術動向まで~](https://cdn.slidesharecdn.com/ss_thumbnails/ts1-01-210607042113-thumbnail.jpg?width=640&height=640&fit=bounds)

























