第2部~第4部の内容(予定)
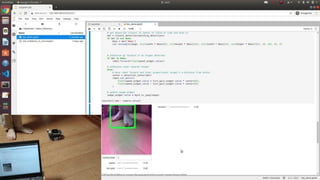
1. 画像処理サンプルや機械学習を用いたサンプルを実行
a. JupyterNotebookを使ったサンプルプログラムでJetson Nano Mouseを操作
b. 上記サンプルプログラムの簡単な解説
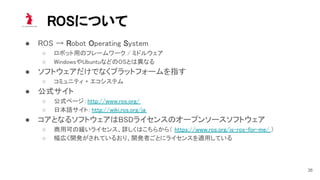
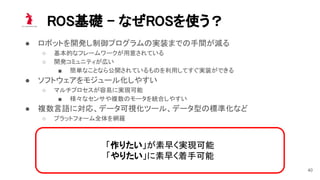
2. ROSの説明
a. ROSが開発されるようになった経緯とその特徴の紹介
3. ROSサンプルを実行
a. アールティが公開しているサンプルプログラムでJetson Nano Mouseを操作
b. 上記サンプルプログラムの簡単な解説
4. 複雑な構成のROSパッケージの紹介
a. 機械学習を用いた画像処理用ROSパッケージなど
ほかのROSパッケージとの連携デモの紹介
b. 使い方を紹介し、詳細を説明した資料を別途配布予定

































































![SSII2022 [TS2] 自律移動ロボットのためのロボットビジョン〜 オープンソースの自動運転ソフトAutowareを解説 〜](https://cdn.slidesharecdn.com/ss_thumbnails/ts2ssii2022r4-220607054405-1c6b5fc2-thumbnail.jpg?width=640&height=640&fit=bounds)


















































