Download free for 30 days
Sign in
Upload
Language (EN)
Support
Business
Mobile
Social Media
Marketing
Technology
Art & Photos
Career
Design
Education
Presentations & Public Speaking
Government & Nonprofit
Healthcare
Internet
Law
Leadership & Management
Automotive
Engineering
Software
Recruiting & HR
Retail
Sales
Services
Science
Small Business & Entrepreneurship
Food
Environment
Economy & Finance
Data & Analytics
Investor Relations
Sports
Spiritual
News & Politics
Travel
Self Improvement
Real Estate
Entertainment & Humor
Health & Medicine
Devices & Hardware
Lifestyle
Change Language
Language
English
Español
Português
Français
Deutsche
Cancel
Save
Submit search
EN
Uploaded by
Yuki Suga
PDF, PPTX
3,311 views
機械図面の基礎
2015年10月2日のロボティクス表現デザインの講義資料
Technology
◦
Read more
2
Save
Share
Embed
Embed presentation
Download
Download as PDF, PPTX
1
/ 92
2
/ 92
3
/ 92
4
/ 92
5
/ 92
6
/ 92
Most read
7
/ 92
8
/ 92
9
/ 92
10
/ 92
11
/ 92
12
/ 92
13
/ 92
14
/ 92
15
/ 92
16
/ 92
17
/ 92
18
/ 92
19
/ 92
20
/ 92
21
/ 92
22
/ 92
23
/ 92
24
/ 92
Most read
25
/ 92
26
/ 92
27
/ 92
28
/ 92
29
/ 92
30
/ 92
31
/ 92
32
/ 92
33
/ 92
34
/ 92
35
/ 92
36
/ 92
37
/ 92
38
/ 92
39
/ 92
40
/ 92
41
/ 92
42
/ 92
43
/ 92
44
/ 92
45
/ 92
46
/ 92
47
/ 92
48
/ 92
49
/ 92
50
/ 92
51
/ 92
52
/ 92
53
/ 92
54
/ 92
55
/ 92
56
/ 92
57
/ 92
58
/ 92
59
/ 92
60
/ 92
61
/ 92
62
/ 92
63
/ 92
64
/ 92
65
/ 92
66
/ 92
67
/ 92
68
/ 92
69
/ 92
70
/ 92
71
/ 92
72
/ 92
73
/ 92
74
/ 92
75
/ 92
76
/ 92
77
/ 92
78
/ 92
79
/ 92
80
/ 92
81
/ 92
82
/ 92
83
/ 92
84
/ 92
85
/ 92
86
/ 92
87
/ 92
88
/ 92
89
/ 92
90
/ 92
91
/ 92
92
/ 92
More Related Content
PDF
[量子コンピューター勉強会資料] マヨラナ粒子によるスケーラブルな量子コンピューターの設計
by
Takayoshi Tanaka
PDF
老舗メーカーにアジャイル型要求開発を導入してみました(中原慶)
by
Kei Nakahara
PPTX
クラシフィケーション・ツリー法入門
by
H Iseri
PDF
深層生成モデルと世界モデル, 深層生成モデルライブラリPixyzについて
by
Masahiro Suzuki
PPTX
DLゼミ: MobileOne: An Improved One millisecond Mobile Backbone
by
harmonylab
PDF
平滑化処理の繰り返しによる画像セグメンテーションのためのグラフカット
by
MPRG_Chubu_University
PPTX
論文の書き方(研究室用)
by
Takanori Fukui
PDF
Salome mecaトレーニング(初級)「応力解析のはじめかた」
by
Jun Tatsuno
[量子コンピューター勉強会資料] マヨラナ粒子によるスケーラブルな量子コンピューターの設計
by
Takayoshi Tanaka
老舗メーカーにアジャイル型要求開発を導入してみました(中原慶)
by
Kei Nakahara
クラシフィケーション・ツリー法入門
by
H Iseri
深層生成モデルと世界モデル, 深層生成モデルライブラリPixyzについて
by
Masahiro Suzuki
DLゼミ: MobileOne: An Improved One millisecond Mobile Backbone
by
harmonylab
平滑化処理の繰り返しによる画像セグメンテーションのためのグラフカット
by
MPRG_Chubu_University
論文の書き方(研究室用)
by
Takanori Fukui
Salome mecaトレーニング(初級)「応力解析のはじめかた」
by
Jun Tatsuno
What's hot
PDF
LE NUMÉRIQUE POUR ENSEIGNER ET APPRENDRE
by
Marcel Lebrun
PDF
第3回WBAレクチャー:BRAに基づく海馬体の確率的生成モデルの構築
by
The Whole Brain Architecture Initiative
PPTX
深層自己回帰モデルを用いた俳句の生成と評価に関する研究
by
harmonylab
PDF
採用サイト会社説明_202206版
by
DIGITAL VORN
PPTX
【DL輪読会】Standardized Max Logits: A Simple yet Effective Approach for Identifyi...
by
Deep Learning JP
PDF
Hough forestを用いた物体検出
by
MPRG_Chubu_University
PDF
【論文レベルで理解しよう!】 大規模言語モデル(LLM)編
by
ARISE analytics
PDF
シン モブ・プログラミング 第三形態
by
atsushi nagata
PDF
確率的自己位置推定
by
Horiguchi Shuhei
PPTX
生成AI(ChatGPTなど)を使って実用性を高めるデザインシンキング(思考)入門
by
Koji Fukuoka
PDF
論文紹介 : Vision Transformer with Deformable Attention
by
KazunariHemmi
PDF
KJ法のW型問題解決モデルとU理論、それぞれの問題意識 加筆版
by
nishio
PPTX
【DL輪読会】マルチモーダル 基盤モデル
by
Deep Learning JP
PPTX
ステレオカメラ作成の道
by
ytanno
PPTX
多チャンネルバイラテラルフィルタの高速化
by
Norishige Fukushima
PPTX
Bert(transformer,attention)
by
norimatsu5
PDF
株式会社フィックスターズ 会社説明資料(抜粋)
by
Fixstars Corporation
PDF
cvpaper.challengeについて
by
cvpaper. challenge
LE NUMÉRIQUE POUR ENSEIGNER ET APPRENDRE
by
Marcel Lebrun
第3回WBAレクチャー:BRAに基づく海馬体の確率的生成モデルの構築
by
The Whole Brain Architecture Initiative
深層自己回帰モデルを用いた俳句の生成と評価に関する研究
by
harmonylab
採用サイト会社説明_202206版
by
DIGITAL VORN
【DL輪読会】Standardized Max Logits: A Simple yet Effective Approach for Identifyi...
by
Deep Learning JP
Hough forestを用いた物体検出
by
MPRG_Chubu_University
【論文レベルで理解しよう!】 大規模言語モデル(LLM)編
by
ARISE analytics
シン モブ・プログラミング 第三形態
by
atsushi nagata
確率的自己位置推定
by
Horiguchi Shuhei
生成AI(ChatGPTなど)を使って実用性を高めるデザインシンキング(思考)入門
by
Koji Fukuoka
論文紹介 : Vision Transformer with Deformable Attention
by
KazunariHemmi
KJ法のW型問題解決モデルとU理論、それぞれの問題意識 加筆版
by
nishio
【DL輪読会】マルチモーダル 基盤モデル
by
Deep Learning JP
ステレオカメラ作成の道
by
ytanno
多チャンネルバイラテラルフィルタの高速化
by
Norishige Fukushima
Bert(transformer,attention)
by
norimatsu5
株式会社フィックスターズ 会社説明資料(抜粋)
by
Fixstars Corporation
cvpaper.challengeについて
by
cvpaper. challenge
Similar to 機械図面の基礎
PDF
組み込み入門
by
Yuki Suga
PPTX
ISS2018 seminar
by
Yoshihisa Ijiri
PDF
ロボットについて (ロボットのソフトウェア的側面と分散モジュール開発)
by
Yuki Suga
PPT
基板を作ろう
by
Kazuyuki Nakashima
PDF
北九州デジタルクリエイターコンテスト2013記念講演会
by
Shigeru Kobayashi
PDF
Rtミドルウェアサマーキャンプ資料2021_菅佑樹
by
openrtm
PDF
TechWave塾第14期第4回
by
Shigeru Kobayashi
PDF
3 dプリンタの使い方
by
mgwsuzuki
PPTX
Project Araと新しいものづくりのエコシステム
by
maruyama097
PPT
基板を作ろう(修正版)
by
Kazuyuki Nakashima
PDF
20140921 アトリエ秋葉原 開発ワークショップ_v10
by
Atelier Akihabara
PDF
組み込み入門
by
Yuki Suga
PDF
RTミドルウェアサマーキャンプ資料2022.pdf
by
openrtm
PDF
NEDO特別講座_画像処理・AI技術活用コース_後編
by
NEDOROBOMARC
PPT
#2祖父と孫をつなぐ
by
Toshiko-Seki
PDF
オープンソースハードウェアのケーススタディー
by
Shigeru Kobayashi
PDF
フィジカルコンピューティングとその可能性
by
Shigeru Kobayashi
KEY
Makersを題材にソフトウェア開発を考える
by
Junya Yamaguchi
PDF
Fab Chair
by
Tomoki Hiramoto
KEY
FabLab前後概観
by
Toriningen,Inc.
組み込み入門
by
Yuki Suga
ISS2018 seminar
by
Yoshihisa Ijiri
ロボットについて (ロボットのソフトウェア的側面と分散モジュール開発)
by
Yuki Suga
基板を作ろう
by
Kazuyuki Nakashima
北九州デジタルクリエイターコンテスト2013記念講演会
by
Shigeru Kobayashi
Rtミドルウェアサマーキャンプ資料2021_菅佑樹
by
openrtm
TechWave塾第14期第4回
by
Shigeru Kobayashi
3 dプリンタの使い方
by
mgwsuzuki
Project Araと新しいものづくりのエコシステム
by
maruyama097
基板を作ろう(修正版)
by
Kazuyuki Nakashima
20140921 アトリエ秋葉原 開発ワークショップ_v10
by
Atelier Akihabara
組み込み入門
by
Yuki Suga
RTミドルウェアサマーキャンプ資料2022.pdf
by
openrtm
NEDO特別講座_画像処理・AI技術活用コース_後編
by
NEDOROBOMARC
#2祖父と孫をつなぐ
by
Toshiko-Seki
オープンソースハードウェアのケーススタディー
by
Shigeru Kobayashi
フィジカルコンピューティングとその可能性
by
Shigeru Kobayashi
Makersを題材にソフトウェア開発を考える
by
Junya Yamaguchi
Fab Chair
by
Tomoki Hiramoto
FabLab前後概観
by
Toriningen,Inc.
More from Yuki Suga
PDF
OpenRTM-aist入門
by
Yuki Suga
PDF
ネットワーク通信入門
by
Yuki Suga
PDF
Wasanbonの開発
by
Yuki Suga
PDF
適応アルゴリズムとコミュニケーションロボット
by
Yuki Suga
PDF
RTミドルウエア講習会2015
by
Yuki Suga
PPT
RTミドルウエア活用について
by
Yuki Suga
PDF
SI2008 RT-middleware Contest
by
Yuki Suga
PPTX
Robotech2012講習会v01最終版v2
by
Yuki Suga
PDF
RTC-scilab
by
Yuki Suga
PPTX
RTミドルウエアコンテスト2011応募作品「RTno」
by
Yuki Suga
OpenRTM-aist入門
by
Yuki Suga
ネットワーク通信入門
by
Yuki Suga
Wasanbonの開発
by
Yuki Suga
適応アルゴリズムとコミュニケーションロボット
by
Yuki Suga
RTミドルウエア講習会2015
by
Yuki Suga
RTミドルウエア活用について
by
Yuki Suga
SI2008 RT-middleware Contest
by
Yuki Suga
Robotech2012講習会v01最終版v2
by
Yuki Suga
RTC-scilab
by
Yuki Suga
RTミドルウエアコンテスト2011応募作品「RTno」
by
Yuki Suga
Recently uploaded
PDF
ST2024_PM1_2_Case_study_of_local_newspaper_company.pdf
by
akipii ogaoga
PDF
Team Topology Adaptive Organizational Design for Rapid Delivery of Valuable S...
by
akipii ogaoga
PDF
第21回 Gen AI 勉強会「NotebookLMで60ページ超の スライドを作成してみた」
by
嶋 是一 (Yoshikazu SHIMA)
PDF
2025→2026宙畑ゆく年くる年レポート_100社を超える企業アンケート総まとめ!!_企業まとめ_1229_3版
by
sorabatake
PDF
100年後の知財業界-生成AIスライドアドリブプレゼン イーパテントYouTube配信
by
e-Patent Co., Ltd.
PDF
Starlink Direct-to-Cell (D2C) 技術の概要と将来の展望
by
CRI Japan, Inc.
PDF
PMBOK 7th Edition_Project Management Context Diagram
by
akipii ogaoga
PDF
FY2025 IT Strategist Afternoon I Question-1 Balanced Scorecard
by
akipii ogaoga
PDF
Reiwa 7 IT Strategist Afternoon I Question-1 3C Analysis
by
akipii ogaoga
PDF
Reiwa 7 IT Strategist Afternoon I Question-1 Ansoff's Growth Vector
by
akipii ogaoga
PDF
PMBOK 7th Edition_Project Management Process_WF Type Development
by
akipii ogaoga
ST2024_PM1_2_Case_study_of_local_newspaper_company.pdf
by
akipii ogaoga
Team Topology Adaptive Organizational Design for Rapid Delivery of Valuable S...
by
akipii ogaoga
第21回 Gen AI 勉強会「NotebookLMで60ページ超の スライドを作成してみた」
by
嶋 是一 (Yoshikazu SHIMA)
2025→2026宙畑ゆく年くる年レポート_100社を超える企業アンケート総まとめ!!_企業まとめ_1229_3版
by
sorabatake
100年後の知財業界-生成AIスライドアドリブプレゼン イーパテントYouTube配信
by
e-Patent Co., Ltd.
Starlink Direct-to-Cell (D2C) 技術の概要と将来の展望
by
CRI Japan, Inc.
PMBOK 7th Edition_Project Management Context Diagram
by
akipii ogaoga
FY2025 IT Strategist Afternoon I Question-1 Balanced Scorecard
by
akipii ogaoga
Reiwa 7 IT Strategist Afternoon I Question-1 3C Analysis
by
akipii ogaoga
Reiwa 7 IT Strategist Afternoon I Question-1 Ansoff's Growth Vector
by
akipii ogaoga
PMBOK 7th Edition_Project Management Process_WF Type Development
by
akipii ogaoga
機械図面の基礎
1.
SUGAR SWEET ROBOTICS
CO., LTD. ロボティクス表現デザイン講義 機械設計の基礎 ㈱SUGAR SWEET ROBOTICS代表取締役 早稲田大学ヒューマノイド研究所 招聘研究員 芝浦工業大学SIT研究所 客員研究員 東京大学情報理工学系研究科 特任研究員 1 菅 佑樹 @ysuga
2.
SUGAR SWEET ROBOTICS
CO., LTD. 自己紹介 2
3.
SUGAR SWEET ROBOTICS
CO., LTD. 自己紹介 • 菅 佑樹 (Yuki Suga) • 2012〜~ 株式会社SUGAR SWEET ROBOTICS代表取締役 • 2010〜~2012 株式会社リバスト • 2007〜~2010 早稲⽥田⼤大学総合機械⼯工学科助⼿手 (菅野研) 3 http://ysuga.net http://sugarsweetrobotics.com
4.
SUGAR SWEET ROBOTICS
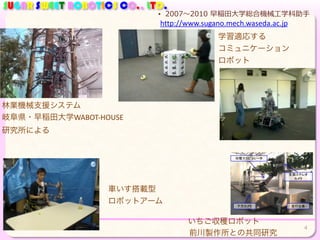
CO., LTD. 林業機械支援システム 学習適応する コミュニケーション ロボット • 2007〜~2010 早稲⽥田⼤大学総合機械⼯工学科助⼿手 4 http://www.sugano.mech.waseda.ac.jp 正面ステレオ カメラ 走行台車下方カメラ 収穫マニピュレータ 車いす搭載型 ロボットアーム いちご収穫ロボット 岐阜県・早稲田大学WABOT-‐HOUSE 研究所による 前川製作所との共同研究
5.
SUGAR SWEET ROBOTICS
CO., LTD. • 2010〜~2012 株式会社リバスト 5 アメリカMobile Robot社 移動台車 Pioneerシリーズ スイス Neuronics社 Katana ロボットアーム カナダ Inuktun社 探索ロボット フランス Aldebaran Robotics社 NAO http://revast.co.jp
6.
SUGAR SWEET ROBOTICS
CO., LTD. • 2012〜~ 株式会社SUGAR SWEET ROBOTICS • http://sugarsweetrobotics.com – ロボットの受託開発・コンサルティング – RTミドルウエアに関する開発 – ロボット⽤用ミドルウエアに関する講演 6
7.
SUGAR SWEET ROBOTICS
CO., LTD. この授業の目的 7
8.
SUGAR SWEET ROBOTICS
CO., LTD. この授業の目的 • ものづくりをしたい人すべて対象 • 図学 • 他人に機械の形,仕組みを伝える技術 • せめて機械系の人にバカにされないように • 僕が欲しかったのはコレジャナイ!を減らす 8
9.
SUGAR SWEET ROBOTICS
CO., LTD. 目標達成度 • 大まかな図形の書き方と読み方 • 細かい規格はどんどん更新されているので省略 • 気持ちを んでもらえる図.議論ができる図 • 図学の教科書を読み始められる準備 9
10.
SUGAR SWEET ROBOTICS
CO., LTD. 図面とは何か • 図面 (drawing sheet) • 設計図.モノをつくるための情報を誰か に伝えるための図 • 言うなればコミュニケーションツール 10
11.
SUGAR SWEET ROBOTICS
CO., LTD. ここでいうコミュニケーション • アイディアを誰かに伝える • つくる人.エンジニア • 同僚.クリエータ • 売る人.ビジネスマン • 偉い人. • 相手によって方法は変わるかもしれない • 今回はエンジニアに伝えるための技術 11
12.
SUGAR SWEET ROBOTICS
CO., LTD. 図面とは何か • オレオレ図面は駄目 • 図面には規格がある.言葉に約束があるのと 一緒. • 日本工業規格 (JIS) • 国際標準化機構 (ISO) • 専門家でなければ,規格を熟知する必要は無い • まずは,ある程度,規格に則って説明する能 力を養おう 12
13.
SUGAR SWEET ROBOTICS
CO., LTD. コンテンツ • ものづくりの基礎 • ものづくりのコミュニケーション • 図学の基礎 • 加工の基礎 • 設計製図の基礎 13
14.
SUGAR SWEET ROBOTICS
CO., LTD. ものづくりのためのコミュニケーション 14
15.
SUGAR SWEET ROBOTICS
CO., LTD. メカトロニクスものづくり 15 機械工学 電気・電子工学 情報工学 メカトロニクス 制御工学 組込み技術 電磁気学 オペレーション システム コンパイラ システム工学 材料力学 流体力学 機械力学 回路理論 半導体 アルゴリズム
16.
SUGAR SWEET ROBOTICS
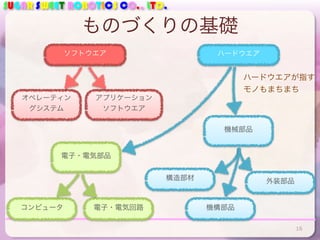
CO., LTD. ものづくりの基礎 16 ソフトウエア ハードウエア オペレーティン グシステム アプリケーション ソフトウエア 電子・電気部品 機械部品 機構部品 外装部品構造部材 電子・電気回路コンピュータ ハードウエアが指す モノもまちまち
17.
SUGAR SWEET ROBOTICS
CO., LTD. メカトロニクスものづくり としてロボットは良い例 17
18.
SUGAR SWEET ROBOTICS
CO., LTD. ロボットとは何か 18
19.
SUGAR SWEET ROBOTICS
CO., LTD. ロボットとは何か? 19 アクチュエー タ マイクロ コントローラ センサ
20.
SUGAR SWEET ROBOTICS
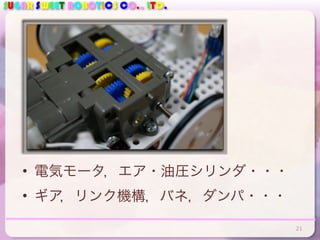
CO., LTD. アクチュエータ • ロボットの動きを生み出す筋肉 20
21.
SUGAR SWEET ROBOTICS
CO., LTD. • 電気モータ,エア・油圧シリンダ・・・ • ギア,リンク機構,バネ,ダンパ・・・ 21
22.
SUGAR SWEET ROBOTICS
CO., LTD. センサ • ロボットの動きを計測する目 22
23.
SUGAR SWEET ROBOTICS
CO., LTD. エンコーダ • ロータの縞模様を 計測することで, 回転した角度を求 める 23
24.
SUGAR SWEET ROBOTICS
CO., LTD. • 赤外線を出す素子と 受ける素子がセット になっている 24 発光 受光 反射光アリ 反射光ナシ 時間
25.
SUGAR SWEET ROBOTICS
CO., LTD. コンピュータ 25
26.
SUGAR SWEET ROBOTICS
CO., LTD. コンピュータをプログラムする • プログラミング言語 • C, C++, C# • Python, Java • Javascript • Haskell, Lisp • 制御工学 • 数学・物理学 • ロボティクス • 運動学 • SLAM • 論理的思考力! 26
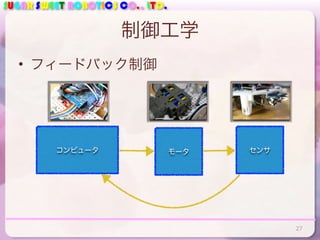
27.
SUGAR SWEET ROBOTICS
CO., LTD. 制御工学 • フィードバック制御 27 コンピュータ センサモータ
28.
SUGAR SWEET ROBOTICS
CO., LTD. 28 コンピュータの力目標距離を 受け取る 目標距離までの 差を計算 モータの出力を計算 モータを回す 少し待つ どれくらい回ったかセ ンサで確認 回った角度から進んだ距 離を計算 差が小さい 終了 小さい まだ大きい
29.
SUGAR SWEET ROBOTICS
CO., LTD. プログラミング言語 • 用途に応じていろいろ使えると良い • C, C++, Java, C# • マイコンなど組み込み,PCで動くアプリケーション, サーバーソフトウエアなど汎用的につかえる言語 • Python, Ruby • 複数のツールを組み合わせるようなスクリプトを書くなど • PHP, Javascript • ブラウザで動くウェブサイト・アプリ • Matlab, Scilab, R • 行列・確率統計などの科学技術計算 29
30.
SUGAR SWEET ROBOTICS
CO., LTD. ロボティクス • 運動学 • ロボットアームの手先を目的の位置に移 動させるために,各関節をどの角度にす れば良いか? • SLAM • 移動ロボットに搭載したレーザーレンジ センサから,環境マップを構築しながら, 自分の位置を推定する計算法 30
31.
SUGAR SWEET ROBOTICS
CO., LTD. メカトロニクスなものづくり と図面 31
32.
SUGAR SWEET ROBOTICS
CO., LTD. それぞれの分野で図面も違う 32 機械工学 電気・電子工学 情報工学 • ソフトウエア仕様書 • フローチャート • ブロック図 • UML • アイディアスケッチ • 仕様書 • 機械図面 • ブロック図 • 回路図 今日はこれ
33.
SUGAR SWEET ROBOTICS
CO., LTD. それぞれの分野で図面も違う 33 機械工学 電気・電子工学 情報工学 • ソフトウエア仕様書 • フローチャート • ブロック図 • UML • アイディアスケッチ • 仕様書 • 機械図面 • ブロック図 • 回路図
34.
SUGAR SWEET ROBOTICS
CO., LTD. 機械図面にもいろいろある 34 • アイディアスケッチ • 仕様書 • 設計図 • 部品図 • 加工図 • 組立図 企画段階 設計開発段階 設計担当 加工担当 組立担当 企画立案 • ひとまず,基礎中の基礎を学んでおこう
35.
SUGAR SWEET ROBOTICS
CO., LTD. 加工の基礎 35
36.
SUGAR SWEET ROBOTICS
CO., LTD. 加工法について知ること • 描いた形すべてが作ることが出来る訳ではない • 3Dプリンタとか万能じゃない • 形は出来るが,機能として満たすには材料と加 工法について知る必要がある • 安価かつ性能のよい加工法はたくさんある 36
37.
SUGAR SWEET ROBOTICS
CO., LTD. 機械加工の基礎 37
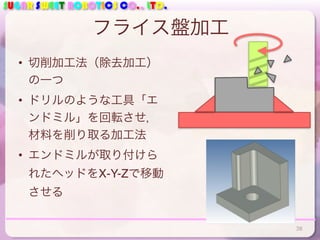
38.
SUGAR SWEET ROBOTICS
CO., LTD. フライス盤加工 • 切削加工法(除去加工) の一つ • ドリルのような工具「エ ンドミル」を回転させ, 材料を削り取る加工法 • エンドミルが取り付けら れたヘッドをX-Y-Zで移動 させる 38
39.
SUGAR SWEET ROBOTICS
CO., LTD. 39 フライス盤 マシニングセンタ
40.
SUGAR SWEET ROBOTICS
CO., LTD. 旋盤加工 • 切削加工法(除去加工)の 一つ • 円筒形の材料を回転させ, バイトと呼ばれる工具を押 し当てて削り取る加工法 • 高速で加工ができ,精度が 良く,固い材料も比較的簡 単に加工できる 40
41.
SUGAR SWEET ROBOTICS
CO., LTD. 41 旋盤加工機
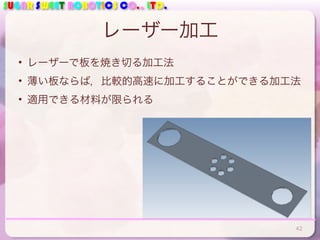
42.
SUGAR SWEET ROBOTICS
CO., LTD. レーザー加工 • レーザーで板を焼き切る加工法 • 薄い板ならば,比較的高速に加工することができる加工法 • 適用できる材料が限られる 42
43.
SUGAR SWEET ROBOTICS
CO., LTD. 43 レーザー加工機
44.
SUGAR SWEET ROBOTICS
CO., LTD. 板金加工 • 板状の金属材料を曲げ たり,叩いたり,切断 したり,型抜きをした り,溶接したりする加 工法の総称 • 安価で入手しやすい材 料からいろいろな形状 が得られる 44
45.
SUGAR SWEET ROBOTICS
CO., LTD. 45 プレス加工機
46.
SUGAR SWEET ROBOTICS
CO., LTD. 鋳物・射出成形 • 金型に溶かした材料を流し込んで形状 を得る加工法 • 型自体の加工が難しいが,材料が無駄 にならないため経済的 • プラスチック製品の加工で主に使われ る手法 46
47.
SUGAR SWEET ROBOTICS
CO., LTD. 47 射出成形機
48.
SUGAR SWEET ROBOTICS
CO., LTD. 放電加工 • 銅や真鍮の工具部品を材料に近づけ つつ,材料と工具の間に高電圧を掛 け火花を飛ばし,材料を蒸発させて 除去する加工法 • 固い材料も加工できるが,加工速度 が遅い • ワイヤー状の工具で放電加工をし, 固い板を焼き切るなどの加工も可能 • 金型加工によく使われる手法 48
49.
SUGAR SWEET ROBOTICS
CO., LTD. 49 放電加工機 ワイヤー放電加工機
50.
SUGAR SWEET ROBOTICS
CO., LTD. 溶接 • 材料を熱して繋ぎ合わせる加 工法 • 焼き切る作業も溶接加工法に 含まれる • ボルト・ナットなどで繋ぎ合 わせるよりも強力かつ軽量 • 技術が特殊で,適用しにくい 材料も多い 50
51.
SUGAR SWEET ROBOTICS
CO., LTD. 3次元プリンタ • 溶かしたプラスチックなどの材料を積み 上げていくことで形状を得る • 紫外線で硬化する特殊なプラスチックを 使う場合(光造形)など,様々な手法が あるが,総じて3次元プリンタと呼ばれ ている • 材料が限られるが,近年は金属材料でも 使えるものが実用化されている • 加工速度が遅く,大量生産には向かない • 積み上げた面ごとに亀裂が入りやすく, 強度は低め 51
52.
SUGAR SWEET ROBOTICS
CO., LTD. 早稲田ものづくり工房 • 実際の工作機械を使うことが出来る • ものづくりをする学生をサポートするプロジェクトがある • http://www.koubou.sci.waseda.ac.jp 52
53.
SUGAR SWEET ROBOTICS
CO., LTD. 加工方法を知ることで • 部品の加工方法を考え ながら設計を検討する • 早く安価に製作 • 強くて軽い設計 • 標準的な機械部品を組 み合わせれば安価に 53 実際にあった 駄目な設計
54.
SUGAR SWEET ROBOTICS
CO., LTD. 図面の基礎 54
55.
SUGAR SWEET ROBOTICS
CO., LTD. 図形の表し方 • 線の種類 • 投影法 • 投影図 • 断面図 • 寸法 55
56.
SUGAR SWEET ROBOTICS
CO., LTD. 線の種類と投影図 56
57.
SUGAR SWEET ROBOTICS
CO., LTD. 線の種類 • 太い実線 • 細い実線 • 破線 • 一点鎖線 • 二点鎖線 57
58.
SUGAR SWEET ROBOTICS
CO., LTD. 投影法 • 3次元の形状を2次元の図面上で表す にはどうすればいいか • 斜投影 • 斜め上からの投影図 • 全体を俯瞰で知るには良い • 穴が貫通しているかがわからない • 反対側がわからない • 寸法が入れにくい 58 穴は貫通してる?
59.
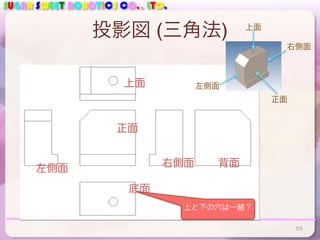
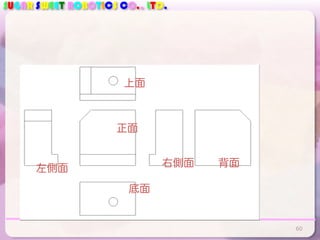
SUGAR SWEET ROBOTICS
CO., LTD. 投影図 (三角法) 59 上面 底面 正面 左側面 右側面 背面 上と下の穴は一緒? 左側面 正面 右側面 上面
60.
SUGAR SWEET ROBOTICS
CO., LTD. 60 上面 底面 正面 左側面 右側面 背面
61.
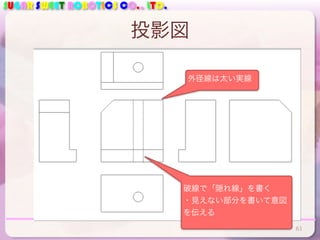
SUGAR SWEET ROBOTICS
CO., LTD. 投影図 61 破線で「隠れ線」を書く ・見えない部分を書いて意図 を伝える 外径線は太い実線
62.
SUGAR SWEET ROBOTICS
CO., LTD. 断面図 62
63.
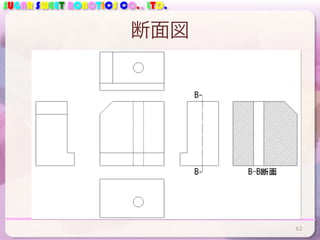
SUGAR SWEET ROBOTICS
CO., LTD. 覚えておくべき細かな約束 63
64.
SUGAR SWEET ROBOTICS
CO., LTD. 書く側のポイント • 2種類以上の解釈ができないよう に書く • 断面図や,部分投影図を足す • 注釈を付ける • 正面図は,その部品の機能を表 すものにする • 中心線や中心マークは,図のわ かりやすさを補助する 64
65.
SUGAR SWEET ROBOTICS
CO., LTD. 読む側のポイント • 最低限,これくらいは知っとけ • 投影図 • 断面図 • 隠れ線 65
66.
SUGAR SWEET ROBOTICS
CO., LTD. 寸法の入れ方 66
67.
SUGAR SWEET ROBOTICS
CO., LTD. 基本的な長さ寸法 • 対象となる線に並行な両向き矢印 • 細い実線 • 単位はミリメートル • 数値は水平か,右側から読む配置 • 狭いところでは矢印は反転 • 基本的に垂直・水平方向に寸法を 取る 67
68.
SUGAR SWEET ROBOTICS
CO., LTD. 長さ寸法 • 累進寸法 • 角を原点と決めて記入 • 加工法によってはわか りやすい 68
69.
SUGAR SWEET ROBOTICS
CO., LTD. 円の寸法 • 円の直径は「Φ」を付ける • 小さな円の直径は,寸法 線を延長して書く 69
70.
SUGAR SWEET ROBOTICS
CO., LTD. 複数の図に寸法を入れる 70
71.
SUGAR SWEET ROBOTICS
CO., LTD. その他の寸法 • 表面アラサ記号 • 三角が接している面が 対象 • 数値が低いほど滑らか • 浮いているアラサ記号 は全体を表す • 方言が多い 71
72.
SUGAR SWEET ROBOTICS
CO., LTD. その他の図面要素 • 幾何交差 • 基準面 (A) に対する位置度 • それ以外に,平面度,円筒度,同心度,平行度,垂 直度など,幾何的な特性について許容誤差を指定 72
73.
SUGAR SWEET ROBOTICS
CO., LTD. 73
74.
SUGAR SWEET ROBOTICS
CO., LTD. 書く側のポイント • 寸法や公差記号の入れ方でセンスがわかる • 精度や公差の問題 • 加工方法と寸法の入れ方の対応 74
75.
SUGAR SWEET ROBOTICS
CO., LTD. 読む側のポイント • 最低限これだけは知っとけ • 寸法の見方.どこの長さを指しているか • 累進寸法 • 直径寸法 75
76.
SUGAR SWEET ROBOTICS
CO., LTD. 設計製図の基礎 76
77.
SUGAR SWEET ROBOTICS
CO., LTD. 設計製図とは • 設計と製図はリンクしてる • 機械は結構,標準的な機械要素の組み合わせ技術 • 機械要素の図化方法について知っておくと便利 • 多くの機械要素について知っておくことが助けになる • 数値計算は専門家に任せて良い • 標準品を組み合わせて安価に作る • 図面に機械要素は頻繁に出てくる • 作図法にルールがある 77
78.
SUGAR SWEET ROBOTICS
CO., LTD. ネジの図面 • ボルト • M○×△でネジの部分の 太さと長さ • ほとんどが規格で決まっ ている • 外径の太線と,ネジを表 す破線でネジ部を表す • 注釈があれば丁寧 78 ボルトの頭
79.
SUGAR SWEET ROBOTICS
CO., LTD. 雌ねじ • ボルト側を「雄ねじ」 • ネジ穴側を「雌ねじ」 • 穴の外径線の周りに,ネジ を表す破線を書く • 断面にネジ穴が出る場合も ほぼ同様 • ネジはJIS規格がよく更新さ れるので,方言が多い 79
80.
SUGAR SWEET ROBOTICS
CO., LTD. ネジ関連の知識 • ザグリ • ボルトの頭が部品に隠れる ように,穴の口を広く切り 込んでおく加工 • 皿ザグリ ー 皿ネジ • 深ザグリ ー ボルト 80
81.
SUGAR SWEET ROBOTICS
CO., LTD. 軸・軸受け • 「軸」とは動力を伝達する円筒 形の部品 • 通常は「軸受け」で支持 • 「プーリ」や「歯車」を連結する • プーリにトルクを伝達するために 「キー」や「スプライン」「セ レーション」などを使う 81 軸受け キー
82.
SUGAR SWEET ROBOTICS
CO., LTD. 歯車 • てこの原理で増速・減速する • ピッチ円 • 歯車のかみ合いを摩擦車のこ すり合いに見立てる • 摩擦車の直径の比=ギア比 • 摩擦車=ピッチ円 • 図面は,ピッチ円のみ書く省略法 が用いられることがある • 平歯車・かさ歯車・冠歯車・ラックと ピニオン・ウォームギア・遊星歯車 82
83.
SUGAR SWEET ROBOTICS
CO., LTD. ベルト・チェーン • 伝達する軸間の距離を長くできる • ベルト・プーリ • ベルトは静粛で無潤滑 • 歯付きベルトは高負荷対応 • チェーン・スプロケット • 自転車やフォークリフトのチェーン • チェーンは高負荷伝達可能 • 潤滑が必要 83
84.
SUGAR SWEET ROBOTICS
CO., LTD. 組立図 • 機械要素と,それを結合する部品を組み合 わせるとこうなるよ,という図 • 機械の機能のコンセプトを示すために使え る図 84
85.
SUGAR SWEET ROBOTICS
CO., LTD. 組立図 • モータからの出力をプーリで受け,直径の大きな軸に伝える • 動部にはベアリング 85 プーリ モータ ベアリング 出力軸
86.
SUGAR SWEET ROBOTICS
CO., LTD. 86
87.
SUGAR SWEET ROBOTICS
CO., LTD. 断面図が部品を表しやすい • 断面図は別の部品のときはハッチ ングが違う • 色分けすることもある • バルーンが部品番号 • 通常は部品表がある • ネジなどは省略される場合アリ • ベアリングの表記 87
88.
SUGAR SWEET ROBOTICS
CO., LTD. 達成目標 • 断面を切った組立図くらい書けると良い • メカニズムや,センサなどの部品の位置 関係がわかる・伝えることが出来る • 寸法を適宜入れる・読むことが出来る • 基本的な機械要素について知っている 88
89.
SUGAR SWEET ROBOTICS
CO., LTD. まとめ • コミュ力を磨け • 空気を読んだりする技術ではない • 工学的コミュニケーション • 相手の分野に半歩で良いから足を踏み入れ なければ,本物の人は相手にしてくれない 89
90.
SUGAR SWEET ROBOTICS
CO., LTD. 参考文献 90
91.
SUGAR SWEET ROBOTICS
CO., LTD. 課題1 • 右の図の物体の図面を書け • 物体の縦x横x高さは50x50x50mm • 凸部の厚さは20.つまりフランジの長さは15. • 面取りは10x10 • 段付き円筒穴は,Φ12貫通,ザグリ部はΦ15で深さ5.底面 から25,前面から25の位置 • 底部の取り付け穴はΦ4.5貫通で前面から25,フランジ端面 から7.5の位置 • 凸部に開けられた段付き円筒穴は断面図で表すこと • 断面方向は任意だが,円筒の中心軸に沿って切断すること • すべての長さ寸法を入れること • 二重寸法禁止 • 手書きで良いが,直線や直角は定規で,円はコンパスで書 くこと. 91前面 フランジ端面 段付き穴 取り付け穴 面取り
92.
SUGAR SWEET ROBOTICS
CO., LTD. 終わり SUGAR SWEET ROBOTICS 菅 佑樹 ysuga@ssr.tokyo 92
Download











































































![[量子コンピューター勉強会資料] マヨラナ粒子によるスケーラブルな量子コンピューターの設計](https://cdn.slidesharecdn.com/ss_thumbnails/20180315microsoftquantumdevice-180317073848-thumbnail.jpg?width=640&height=640&fit=bounds)

































































