Downloaded 1,962 times
![Books.
Text Books:
Digital Signal Processing
Principles, Algorithms and Applications
By:
John G.Proakis & Dimitris G.Manolakis
Reference Books
1. Digital Signal Processing By.
Sen M. Kuo & Woon-Seng Gan
2. Digital Signal Processing A Practical Approach. By
Emmanuel C. Ifeachor & Barrie W. Jervis
[Handouts]
Digital Signal Processing By. Bores [Avail at ww.bores.com/courses/
Engr. A. R.K. Rajput NFC IET 2
Multan](https://image.slidesharecdn.com/lecturedsp2011-0-120918054047-phpapp02/85/Lecture-Digital-Signal-Processing-Batch-2009-2-320.jpg)

![Signal : f(x1: x2……….. ) is function, A function is a dependent variable of independent
variable(s).
X= Time, Distance, Temperature,….
Type of signal Natural Signal [1D,2D,MD]
Continuous? Discrete Signal
Analog Signal = 1-Cont-time--- 2-Discrete Time ---- A/D -----Digital Signal
Analog and Digital Signals
Analog signal = continuous-time + continuous amplitude
Digital signal = discrete-time + discrete amplitude
Signal Processing
analog system = analog signal input + analog signal output
advantages: easy to interface to real world, do not need A/D or D/A converters,
speed not dependent on clock rate
digital system = digital signal input + digital signal output I re-configurability
using software, greater control over accuracy/resolution, predictable and reproducible A.S
behavior D.S M.
Engr. A. R.K. Rajput NFC IET Multan
.p .p
4
S.p](https://image.slidesharecdn.com/lecturedsp2011-0-120918054047-phpapp02/85/Lecture-Digital-Signal-Processing-Batch-2009-4-320.jpg)







![• Continuos-Time Signal:
A signal x(t) is said to be a continuous time signal if it is
defined for all time t.
• Discrete-Time Signal:
A discrete time signal x[nT] has values specified only at
discrete points in time.
• Signal Processing:
A system characterized by the type of operation that it
performs on the signal. For example, if the operation is
linear, the system is called linear. If the operation is non-
linear, the system is said to be non-linear, and so forth.
Such operations are usually referred to as “Signal
Processing”.
Engr. A. R.K. Rajput NFC IET 12
Multan](https://image.slidesharecdn.com/lecturedsp2011-0-120918054047-phpapp02/85/Lecture-Digital-Signal-Processing-Batch-2009-12-320.jpg)






![Periodic Signals
A continuous signal x(t) is periodic if and only if there
exists a T > 0 such that
x(t + T) = x(t)
where T is the period of the signal in units of time.
f = 1/T is the frequency of the signal in Hz. W = 2π/T is
the angular frequency in radians per second.
The discrete time signal x[nT] is periodic if and only if
there exists an N > 0 such that
x[nT + N] = x[nT]
where N is the period of the signal in number of sample
spacings.
Example:
Frequency = 5 Hz or 10π rad/s
0 0.2 0.4 A. R.K. Rajput NFC IET
Engr. 19
Multan](https://image.slidesharecdn.com/lecturedsp2011-0-120918054047-phpapp02/85/Lecture-Digital-Signal-Processing-Batch-2009-19-320.jpg)

![Discrete Time Sinusoidal Signals
A discrete time sinusoidal signal may be expressed as
x[n] = Acos(wn + θ) -∞ < n < ∞
Properties:
• A discrete time sinusoid is periodic only if its frequency is a
rational number.
• Discrete time sinusoids whose frequencies are separated by
an integer multiple of 2π are identical.
1
0
-1
0 2 4 6 8 10
Engr. A. R.K. Rajput NFC IET 21
Multan](https://image.slidesharecdn.com/lecturedsp2011-0-120918054047-phpapp02/85/Lecture-Digital-Signal-Processing-Batch-2009-21-320.jpg)
![Energy and Power Signals
The total energy of a continuous time signal x(t) is
defined as
T ∞
E x = lim ∫ x ( t )dt = ∫ x 2 ( t )dt
2
T →∞
−T −∞
And its average power is
T/ 2
1 2
Px = lim ∫x ( t )dt
T→ T∞
− /2
T
In the case of a discrete time signal x[nT], the total energy of
the ∞
signal dx = T ∑ x 2 [n ]
E is
n =−∞
And its average power is defined by
2
1 N
Pdx = lim ∑ x[nT]
N → 2N + 1 n =−N
∞
Engr. A. R.K. Rajput NFC IET 22
Multan](https://image.slidesharecdn.com/lecturedsp2011-0-120918054047-phpapp02/85/Lecture-Digital-Signal-Processing-Batch-2009-22-320.jpg)

![Example1:
Compute the signal energy and signal power for
x[nT] = (-0.5)nu(nT), T = 0.01 seconds
Solution:
N 2 ∞ 2
E dx = lim T ∑x(nT ) = 0.01 ∑(−0.5 )
n
N→∞ n =−N n=0
∞ 2n ∞
= .01 ∑ 0.5 )
0 (− = .01 ∑.25 n
0 0
n=0 n=0
[
= 0.01 1 + 0.25 + ( 0.25 ) + ( 0.25 ) + .......
2 3
]
0.01
= = / 75
1
1 − .25
0
Since Edx is finite, the signal power is zero.
Engr. A. R.K. Rajput NFC IET 24
Multan](https://image.slidesharecdn.com/lecturedsp2011-0-120918054047-phpapp02/85/Lecture-Digital-Signal-Processing-Batch-2009-24-320.jpg)
![Example2:
Repeat Example1 for y[nT] = 2ej3nu[nT], T = 0.2 second.
Solution:
2
1 N 1 N 2
Pdx = lim ∑ y (nT) = lim ∑ 2e j3n
N → ∞ 2N + 1 n = − N N → ∞ 2N + 1 n = 0
1 N 2 4 N 4( N + 1)
= lim ∑ 2 = lim ∑ 1 = N →∞
lim
N →∞ 2N + 1 n = 0 N →∞ 2N + 1 n = 0 2N + 1
N 1 1
= lim 4 + = 4× = 2
N → ∞ 2N + 1 2N + 1 2
What is energy of this signal?
Engr. A. R.K. Rajput NFC IET 25
Multan](https://image.slidesharecdn.com/lecturedsp2011-0-120918054047-phpapp02/85/Lecture-Digital-Signal-Processing-Batch-2009-25-320.jpg)
![Tutorial 1: Q3
Determine the signal energy and signal power for each
of the given signals and indicate whether it is an energy
signal or a power signal?
(a) y[nT] = 3( −0.2)n u[n − 3], T = 2 ms
(b) z[nT] = 4(1.1) n u[n + 1] T = 0.02 s
(c)
Engr. A. R.K. Rajput NFC IET 26
Multan](https://image.slidesharecdn.com/lecturedsp2011-0-120918054047-phpapp02/85/Lecture-Digital-Signal-Processing-Batch-2009-26-320.jpg)

![Basic Operations on Signals
(a) Operations performed on dependent
variables
1. Amplitude Scaling:
let x(t) denote a continuous time signal. The signal y(t)
resulting from amplitude scaling applied to x(t) is
defined by
y(t) = cx(t)
where c is the scale factor.
In a similar manner to the above equation, for discrete
time signals we write
y[nT] = cx[nT] 2x(t)
x(t)
Engr. A. R.K. Rajput NFC IET 28
Multan](https://image.slidesharecdn.com/lecturedsp2011-0-120918054047-phpapp02/85/Lecture-Digital-Signal-Processing-Batch-2009-28-320.jpg)


![Time scaling of discrete time systems
10
x[n]
5
0
-3 -2 -1 0 1 2 3
x[0.5n]
10
5
0
-1.5 -1 -0.5 0 0.5 1 1.5
5
x[2n]
0
-6 -4 -2 0 2 4 6
n
Engr. A. R.K. Rajput NFC IET 31
Multan](https://image.slidesharecdn.com/lecturedsp2011-0-120918054047-phpapp02/85/Lecture-Digital-Signal-Processing-Batch-2009-31-320.jpg)
![Time Reversal
• This operation reflects the signal about t = 0
and thus reverses the signal on the time scale.
5
x[n]
0
0 1 2 3 4 5
0
n
x[-n]
-5
0 1 2 3 4 5
n
Engr. A. R.K. Rajput NFC IET 32
Multan](https://image.slidesharecdn.com/lecturedsp2011-0-120918054047-phpapp02/85/Lecture-Digital-Signal-Processing-Batch-2009-32-320.jpg)
![Time Shift
A signal may be shifted in time by replacing the
independent variable n by n-k, where k is an
integer. If k is a positive integer, the time shift
results in a delay of the signal by k units of time. If
k is a negative integer, the time shift results in an
advance of the signal by |k| units in time.
x[n]
1
0.5
0 -2
x[n-3] x[n+3]
1 0 2 4 6 8 10
0.5
0 -2 0 2 4 6 8 10
1
0.5
0 -2 0 2 n4
Engr. A. R.K. Rajput NFC IET
Multan
6 8 10 33](https://image.slidesharecdn.com/lecturedsp2011-0-120918054047-phpapp02/85/Lecture-Digital-Signal-Processing-Batch-2009-33-320.jpg)
![2. Addition:
Let x1 [n] and x2[n] denote a pair of discrete time signals.
The signal y[n] obtained by the addition of x1[n] + x2[n]
is defined as
y[n] = x1[n] + x2[n]
Example: audio mixer
3. Multiplication:
Let x1[n] and x2[n] denote a pair of discrete-time signals.
The signal y[n] resulting from the multiplication of the
x1[n] and x2[n] is defined by
y[n] = x1[n].x2[n]
Example: AM Radio Signal
Engr. A. R.K. Rajput NFC IET 34
Multan](https://image.slidesharecdn.com/lecturedsp2011-0-120918054047-phpapp02/85/Lecture-Digital-Signal-Processing-Batch-2009-34-320.jpg)










































![Sampling of Analog Signals
x[n] = x[nT]
Uniform Sampling:
1 1
0.8 0.8
sampled signal
0.6 0.6
analog signal
0.4 0.4
0.2 0.2
0 0
-0.2 -0.2
-0.4 -0.4
-0.6 -0.6
-0.8 -0.8
-1 -1
0 2 4 Engr. A. R.K. Rajput NFC IET
6Multan 0 2 4 6 78
t n](https://image.slidesharecdn.com/lecturedsp2011-0-120918054047-phpapp02/85/Lecture-Digital-Signal-Processing-Batch-2009-78-320.jpg)
![Uniform sampling
• Uniform sampling is the most widely used sampling scheme.
This is described by the relation
x[n] = x[nT] -∞ <n<∞
where x(n) is the discrete time signal obtained by taking samples
of the analogue signal x(t) every T seconds.
The time interval T between successive symbols is called the
Sampling Period or Sampling interval and its reciprocal 1/T = Fs is
called the Sampling Rate (samples per second) or the Sampling
Frequency (Hertz).
A relationship between the time variables t and n of continuous time
and discrete time signals respectively, can be obtained as
n
t = nT = (1) 79
Fs Engr. A. R.K. Rajput NFC IET
Multan](https://image.slidesharecdn.com/lecturedsp2011-0-120918054047-phpapp02/85/Lecture-Digital-Signal-Processing-Batch-2009-79-320.jpg)
![• A relationship between the analog frequency F and the
discrete frequency f may be established as follows.
Consider an analog sinusoidal signal
x(t) = Acos(2πFt + θ)
which, when sampled periodically at a rate Fs = 1/T samples
per second, yields
2πnF
x[nT] = A cos( 2πFnT + Θ) = A cos
F + Θ
(2)
s
But a discrete sinusoid is generally represented as
x[n] = A cos( 2πfn + Θ ) (3)
Comparing (2) and (3) we get
F
f = (4)
Fs
Engr. A. R.K. Rajput NFC IET 80
Multan](https://image.slidesharecdn.com/lecturedsp2011-0-120918054047-phpapp02/85/Lecture-Digital-Signal-Processing-Batch-2009-80-320.jpg)

![Sampling Theorem (cont.)
• Signal sampling at a rate less than the Nyquist rate is
referred to as undersampling.
• Signal sampling at a rate greater than the Nyquist rate is
known as the oversampling.
Example 1:
The following analogue signals are sampled at a sampling frequency of 40
Hz. Find the corresponding discrete time Signals.
(i) x(t) = cos2π(10)t (ii) y(t) = cos2π(50)t
Solution:
(i) 10 π
x1[ n] =cos 2π =cos
n n
40 2
50 5π π
(ii) x2 [n] = cos 2π n = cos n = cos(2πn + πn / 2) = cos n
40 2 2
As, Shows identical in [ x1(n) & x2(n)] sinusoidal signals & indistinguishable. Ambiguity
is there for samples values. x(t) yield same values as y(t) when two are sampled at Fs=40,
then
Note: The frequency F2 = 50 Hz is an alias of F1 = 10 Hz. All of the
Engr. A. R.K. Rajput NFC IET 82
sinusoids cos2π(F1 + 40k)t, t = 1,2,3,… are aliases.
Multan](https://image.slidesharecdn.com/lecturedsp2011-0-120918054047-phpapp02/85/Lecture-Digital-Signal-Processing-Batch-2009-82-320.jpg)
![Example 2
Consider the analog signal
x(t) = 3cos100πt
(a) Determine the minimum required sampling rate to
avoid aliasing.
(b) Suppose that the signal is sampled at the rate Fs = 200
Hz. What is the discrete time signal obtained after
sampling?
Solution:
(a) The frequency of the analog signal is F = 50 Hz.
Hence the minimum sampling rate to avoid aliasing
is 100Hz.
100π π
(b) x[n] = 3 cos 200 n = 3 cos 2 n
Engr. A. R.K. Rajput NFC IET 83
Multan](https://image.slidesharecdn.com/lecturedsp2011-0-120918054047-phpapp02/85/Lecture-Digital-Signal-Processing-Batch-2009-83-320.jpg)


![Some Elementary Discrete Time signals
• Unit Impulse or unit sample sequence:
It is defined as
,
1 n= 0
δn ] =
[
0 n ≠0
In words, the unit sample sequence is a signal that is zero
everywhere, except at t = 0.
1
0.8
0.6
0.4
0.2
0
-3 -2 -1 0 1 2 3
Unit impulse function
Engr. A. R.K. Rajput NFC IET 86
Multan](https://image.slidesharecdn.com/lecturedsp2011-0-120918054047-phpapp02/85/Lecture-Digital-Signal-Processing-Batch-2009-86-320.jpg)
![Some Elementary Discrete Time signals
• Unit step signal
It is defined as
,
1 n ≥0
u[n ] =
0 n <0
2
1.8
1.6
1.4
1.2
1
0.8
0.6
0.4
0.2
00 1 2 3 4 5 6 7
Engr. A. R.K. Rajput NFC IET 87
Multan](https://image.slidesharecdn.com/lecturedsp2011-0-120918054047-phpapp02/85/Lecture-Digital-Signal-Processing-Batch-2009-87-320.jpg)
![Some Elementary Discrete Time signals
• Unit Ramp signal
It is defined as
n, n ≥ 0
r[n] =
0 n < 0
6
5
4
3
2
1
00 1 2 3 4 5 6
Engr. A. R.K. Rajput NFC IET 88
Multan](https://image.slidesharecdn.com/lecturedsp2011-0-120918054047-phpapp02/85/Lecture-Digital-Signal-Processing-Batch-2009-88-320.jpg)
![Some Elementary Discrete Time signals
• Exponential Signal
The exponential signal is a sequence of the form
x[n] = an, for all n
If the parameter a is real, then x[n] is a real signal. The
following figure illustrates x[n] for various values of
a.
0<a<1 a>1
-1<a<0 a<-1
Engr. A. R.K. Rajput NFC IET 89
Multan](https://image.slidesharecdn.com/lecturedsp2011-0-120918054047-phpapp02/85/Lecture-Digital-Signal-Processing-Batch-2009-89-320.jpg)
![Some Elementary Discrete Time signals
• Exponential Signal (cont)
when the parameter a is complex valued, it can be expressed
as
jθ
a = re
where r and θ are now the parameters. Hence we may
express x[n] as
x[n] = r n e jθ = r n ( cos θn + j sin θn )
Since x[n] is now complex valued, it can be represented
graphically by plotting the real part
x R [n] = r cos θ n
n
as a function of n, and separately plotting the imaginary part
x I [n] = r n sin θ n
as a function of n. (see plots on the next slide)
Engr. A. R.K. Rajput NFC IET 90
Multan](https://image.slidesharecdn.com/lecturedsp2011-0-120918054047-phpapp02/85/Lecture-Digital-Signal-Processing-Batch-2009-90-320.jpg)
![1
xR[n] = (0.9)ncos(πn/10)
0.5
0
-0.5
0 10 20 30 40 50 60
1
xI[n] = (0.9)nsin(πn/10)
0.5
0
-0.5
0 10 20 30 40 50 60
Engr. A. R.K. Rajput NFC IET 91
Multan](https://image.slidesharecdn.com/lecturedsp2011-0-120918054047-phpapp02/85/Lecture-Digital-Signal-Processing-Batch-2009-91-320.jpg)
![Exponential Signal (cont.)
Alternatively, the signal x[n] may be graphically represented by the
amplitude or magnitude function
|x[n]| = rn
and the phase function
Φ[n] = θn
The following figure illustrates |x[n| and Φ[n] for r = 0.9 and θ = π/10.
|x[n]|
2
0 0 5 10
-
π
Φ[n]
0
-π
- Engr. A. R.K. Rajput NFC IET
0 5 10 92
n
Multan](https://image.slidesharecdn.com/lecturedsp2011-0-120918054047-phpapp02/85/Lecture-Digital-Signal-Processing-Batch-2009-92-320.jpg)
![Discrete Time Systems
• A discrete time system is a device or algorithm that operates
on a discrete time signal x[n], called the input or excitation,
according to some well defined rule, to produce another
discrete time signal y[n] called the output or response of the
system.
• We express the general relationship between x[n] and y[n] as
y[n] = H{x[n]}
where the symbol H denotes the transformation (also called
an operator), or processing performed by the system on x[n]
to produce y[n].
x[n] Discrete Time System y[n]
H
Engr. A. R.K. Rajput NFC IET 93
Multan](https://image.slidesharecdn.com/lecturedsp2011-0-120918054047-phpapp02/85/Lecture-Digital-Signal-Processing-Batch-2009-93-320.jpg)
![Example 4
• Determine the response of the following
systems to the input signal:
| n |, −3 ≤n ≤ 3
x[n] =
0, otherwise
(a) y[n] = x[n]
(b) y[n] = x[n-1]
(c) y[n] = x[n+1]
(d) y[n] = (1/3)[x[n+1] + x[n] + x[n-1]]
(e) y[n] = max[x[n+1],x[n],x[n-1]]
n
(f) y[n] = ∑x[k ]
k =−∞
Engr. A. R.K. Rajput NFC IET 94
Multan](https://image.slidesharecdn.com/lecturedsp2011-0-120918054047-phpapp02/85/Lecture-Digital-Signal-Processing-Batch-2009-94-320.jpg)
![• Solution:
(a) In this case the output is exactly the same as the input
signal. Such a system is known as the identity System.
(b) y[n] = [……,3, 2, 1, 0, 1, 2, 3,……]
(c) y[n] = […….,3, 2, 1, 0, 1, 2, 3,…….]
(d) y[n] = […., 5/3, 2, 1, 2/3, 1, 2, 5/3, 1, 0,…]
(e) y[n] = [0, 3, 3, 3, 2, 1, 2, 3, 3, 3, 0, ….]
(f) y[n] = […,0, 3, 5, 6, 6, 7, 9, 12, 0, …]
Engr. A. R.K. Rajput NFC IET 95
Multan](https://image.slidesharecdn.com/lecturedsp2011-0-120918054047-phpapp02/85/Lecture-Digital-Signal-Processing-Batch-2009-95-320.jpg)
![Classification of Discrete Time Systems
• Static versus Dynamic Systems
A discrete time system is called static or memory-less if its
output at any instant n depends at most on the input sample
at the same time, but not on the past or future samples of the
input. In any other case, the system is said to be dynamic or
to have memory.
Examples: y[n] = x2[n] is a memory-less system, whereas the
following are the dynamic systems:
(a) y[n] = x[n] + x[n-1] + x[n-2]
(b) y[n] = 2x[n] + 3x[n-4]
Engr. A. R.K. Rajput NFC IET 96
Multan](https://image.slidesharecdn.com/lecturedsp2011-0-120918054047-phpapp02/85/Lecture-Digital-Signal-Processing-Batch-2009-96-320.jpg)
![Time Invariant versus Time Variant Systems
• A system is said to be time invariant if a time delay or time
advance of the input signal leads to an identical time shift in
the output signal. This implies that a time-invariant system
responds identically no matter when the input is applied.
Stated in another way, the characteristics of a time invariant
system do not change with time. Otherwise the system is said
to be time variant.
• Example1: Determine if the system shown in the figure is
time invariant or time variant.
Solution: y[n] = x[n] – x[n-1] y[n]
x[n]
Now if the input is delayed by k units +
in time and applied to the system, the -
Output is Z-1
y[n,k] = n[n-k] – x[n-k-1] (1)
On the other hand, if we delay y[n] by k units in time, we obtain
y[n-k] = x[n-k] – x[n-k-1] (2)
(1) and (2) show that the system is time invariant.
Engr. A. R.K. Rajput NFC IET 97
Multan](https://image.slidesharecdn.com/lecturedsp2011-0-120918054047-phpapp02/85/Lecture-Digital-Signal-Processing-Batch-2009-97-320.jpg)
![Time Invariant versus Time Variant Systems
• Example 2: Determine if the following systems are time invariant or
time variant.
(a) y[n] = nx[n] (b) y[n] = x[n]cosw0n
Solution:
(a) The response to this system to x[n-k] is
y[n,k] = nx[n-k] (3)
Now if we delay y[n] by k units in time, we obtain
y[n-k] = (n-k)x[n-k]
= nx[n-k] – kx[n-k] (4)
which is different from (3). This means the system is time-variant.
(b) The response of this system to x[n-k] is
y[n,k] = x[n-k]cosw0n (5)
If we delay the output y[n] by k units in time, then
y[n-k] = x[n-k]cosw0[n-k]
which is different from that given in (5), hence the system is time
variant.
Engr. A. R.K. Rajput NFC IET 98
Multan](https://image.slidesharecdn.com/lecturedsp2011-0-120918054047-phpapp02/85/Lecture-Digital-Signal-Processing-Batch-2009-98-320.jpg)
![Linear versus Non-linear
Systems
A system H is linear if and only if
H[a1x1[n] + a2x2[n]] = a1H[x1[n]] + a2H[x2[n]]
for any arbitrary input sequences x1[n] and x2[n], and any
arbitrary constants a1 and a2.
a1
x1[n]
y1[n]
a2 + H
x2[n]
a1
x1[n] H
y2[n]
+
a2
x2[n] H
If y1[n] = y2[n], then H is linear.Rajput NFC IET
Engr. A. R.K.
Multan
99](https://image.slidesharecdn.com/lecturedsp2011-0-120918054047-phpapp02/85/Lecture-Digital-Signal-Processing-Batch-2009-99-320.jpg)
![Examples
Determine if the following systems are linear or nonlinear.
(a) y[n] = nx[n]
Solution:
For two input sequences x1[n] and x2[n], the corresponding outputs
are
y1[n] = nx1[n] and y2[n] = nx2[n]
A linear combination of the two input sequences results in the
output
H[a1x1[n] + a2x2[n]] = n[a1x1[n] + a2x2[n]] = na1x1[n] + na2x2[n] (1)
On the other hand, a linear combination of the two outputs results in
the out
a1y1[n] + a2y2[n] = a1nx1[n] + a2nx2[n] (2)
Since the right hand sides of (1) and (2) are identical, the system is
linear.
Engr. A. R.K. Rajput NFC IET 100
Multan](https://image.slidesharecdn.com/lecturedsp2011-0-120918054047-phpapp02/85/Lecture-Digital-Signal-Processing-Batch-2009-100-320.jpg)
![(b) y[n] = Ax[n] + B
Solution:
Assuming that the system is excited by x1[n] and x2[n]
separately, we obtain the corresponding outputs
y1[n] = Ax1[n] + B and y2 = Ax2[n] + B
A linear combination of x1[n] and x2[n] produces the
output
y3[n] = H[a1x1[n] + a2x2[n]] = A[a1x1[n] + a2x2[n]] + B
= Aa1x1[n] + Aa2x2[n] + B (3)
On the other hand, if the system were linear, its output to
the linear combination of x1[n] and x2[n] would be a linear
combination of y1[n] and y2[n], that is,
a1y1[n] + a2y2[n] = a1Ax1[n] + a1B + a2Ax2[n] + a2B (4)
Clearly, (3) and (4) are different and hence the system is
nonlinear. Under what A. R.K. Rajput NFCwould it be linear? 101
Engr.
conditions IET
Multan](https://image.slidesharecdn.com/lecturedsp2011-0-120918054047-phpapp02/85/Lecture-Digital-Signal-Processing-Batch-2009-101-320.jpg)
![Causal versus Noncausal Systems
A system is said to be causal if the output of the system at
any time n [i.e. y[n]) depends only on present and past
inputs but does not depend on future inputs.
Example: Determine if the systems described by the
following input-output equations are causal or
noncausal. n
(a) y[n] = x[n] – x[n-1] (b) y[n] = ax[n] (c) y[n] = ∑ x[k ]
k = −∞
(d) y[n] = x[n] + 3x[n+4] (e) y[n] = x[n2]
(f) y[n] = x[-n]
Solution: The systems (a), (b) and (c) are causal,
others are non-causal.
Engr. A. R.K. Rajput NFC IET 102
Multan](https://image.slidesharecdn.com/lecturedsp2011-0-120918054047-phpapp02/85/Lecture-Digital-Signal-Processing-Batch-2009-102-320.jpg)


![1-The Direct Z- Transform
The z-transform of a sequence x[n] is
∞
X ( z) = ∑z x[ n ]
n=
−∞
−
n
Where z is a complex variable. For convenience, the z-transform of a
signal x[n] is denoted by X(z) = Z{x[n]}
We may obtain the Fourier transform from the z transform by
making the substitution X ( z ) = ω . This corresponds to
e j
restricting z = Also with z =r jω ,
1
e
∞
jω jω −
X (r e ) = ∑[ n]( r e
x ) n
n= ∞
−
That is, the z-transform is the Fourier transform of the sequence x[n]r - n . for r=1
this becomes the Fourier transform of x[n].
The Fourier transform therefore corresponds to the z-transform evaluated on the
unit circle:
DSP Slide 105 Engr. A. R.K. Rajput NFC IET
Multan](https://image.slidesharecdn.com/lecturedsp2011-0-120918054047-phpapp02/85/Lecture-Digital-Signal-Processing-Batch-2009-105-320.jpg)
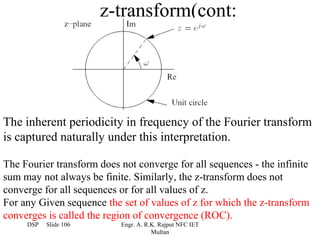
![z-transform(cont:
The Fourier transform of x[n] exists if the sum ∑− x[ n ]
∞
n= ∞
converges. However, the z-transform of x[n] is just the Fourier
transform of the sequence x[n]r -n. The z-transform therefore exists
(or converge) if
X ( z ) = ∑ =−∞ x[ n]r <∞
∞ −n
n
This leads to the condition −
∑
n
<∞
∞
n= ∞
−
x[ n] z
for the existence of the z-transform. The ROC therefore consists of a
ring in the z-plane:
In specific cases the inner radius of this ring may include the origin, and the outer
radius may extend to infinity. If the ROC includes the unit circle=
DSP Slide 107 Engr. A. R.K. Rajput NFC IET z 1 , then
the Fourier transform will converge. Multan](https://image.slidesharecdn.com/lecturedsp2011-0-120918054047-phpapp02/85/Lecture-Digital-Signal-Processing-Batch-2009-107-320.jpg)

![Example: right-sided exponential sequence
Consider the signal x[n] = anu[n]. This has the z-transform
∞ ∞
X ( z) = ∑a u[n]z = ∑(az )
n =−∞
n −n
n =0
−1 n
Convergence requires that ∞
∑ az −1 < ∞
n =∞
which is only the case if az − < . equivalently
1
1 or z >a .
In the ROC, the series converges to
∞
1 z
X ( z ) = ∑ (az ) = =
−1 n
, z > a,
n= 0 1 − az −1
z−a
since it is just a geometric series.
DSP Slide 109 Engr. A. R.K. Rajput NFC IET
Multan](https://image.slidesharecdn.com/lecturedsp2011-0-120918054047-phpapp02/85/Lecture-Digital-Signal-Processing-Batch-2009-109-320.jpg)
![Example: right-sided exponential sequence
The z-transform has a region of convergence for any finite
value of a.
The Fourier transform of x[n] only exists if the ROC
includes the unit circle, which requires that a <1. On
the other hand, if a >1 then the ROC does not include
the unit circle, and Fourier transform does not exist. This
is consistent with the fact that for these values of a the
sequence anu[n] is exponentially growing, and the sum
therefore 110
DSP Slide does not converge.Rajput NFC IET
Engr. A. R.K.
Multan](https://image.slidesharecdn.com/lecturedsp2011-0-120918054047-phpapp02/85/Lecture-Digital-Signal-Processing-Batch-2009-110-320.jpg)
![Example: left-sided exponential sequence
Now consider the sequence x ( n) =− n u[ − − ].
a n 1
This sequence is left-sided because it is nonzero only for n ≤ 1.
−
The z-transform is ∞ −1
X ( z ) = ∑ a n u[ − − ] z −n =−∑ n z −n
− n 1 a
n= ∞
− n= ∞
−
∞ ∞
=− a −n z n = −∑a − z ) n
∑ 1 ( 1
n=1 n=0
For a − z < ,or
1
1 z <a , the series converges to
Note that the expression for the
z-transform (and the pole zero
plot) is exactly the same as for
the right-handed exponential
sequence - only the region of
convergence is different.
Specifying the ROC is therefore
critical when dealing with the z- Engr. A. R.K. Rajput NFC IET
DSP Slide 111
transform. Multan](https://image.slidesharecdn.com/lecturedsp2011-0-120918054047-phpapp02/85/Lecture-Digital-Signal-Processing-Batch-2009-111-320.jpg)
![Example: Sum of two exponentials
n n
1 1
The signal x[n] = u[n] + − u[n] is the sum of two real exponentials
2 3
The z transform is
∞ −
n n
1 1
X ( z ) =∑ u[ n ] + − u[ n] n
z
n= ∞
−
2 3
∞ ∞ n n
1 1
=∑ u[ n ] z
−n
+ ∑− u[ n] z −
n
n= ∞ 2
− −
n= ∞ 3
n n
1 −
∞ ∞
1 −
∑
= z +
n=
1
∑− z 1
0 2 n=
0 3
From the example for the right-handed exponential sequence, the first term in this
sum converges for z >1 / 2 and the second for z >1 / 3 The combined
transform X(z) therefore converges in the intersection of these regions, namely when
z >1 / 2 . 1
2 z z −
1 1 12
In this case X ( z ) = + =
1 −1 1 −1 1 1
DSP Slide 112 1 − Engr. A. R.K. Rajput NFC IET
z 1+ z z − z +
2 Multan 3 2 3](https://image.slidesharecdn.com/lecturedsp2011-0-120918054047-phpapp02/85/Lecture-Digital-Signal-Processing-Batch-2009-112-320.jpg)


![2-Properties of the region of convergence
The properties of the ROC depend on the nature of the signal. Assuming that the
signal has a finite amplitude and that the z-transform is a rational function:
The ROC is a ring or disk in the z-plane, centered on the origin
τ τ
(0 ≤ R < z < L ≤∞).
The Fourier transform of x[n] converges absolutely if and only if the ROC of
the z-transform includes the unit circle.
The ROC cannot contain any poles.
If x[n] is finite duration (ie. zero except on finite interval (∞< N1 ≤ n ≤ N 2 < ∞).
∞
), then the ROC is the entire Z-plan except perhaps at z=0 or
z= .
If x[n] is a right-sided sequence then the ROC extends outward from the
outermost finite pole to infinity.
If x[n] is left-sided then the ROC extends inward from the innermost nonzero
pole to z = 0.
A two-sided sequence (neither left nor right-sided) has a ROC consisting of a
ring in the z-plane, bounded on the interior and exterior by a pole (and not
containing any poles).
The ROC is115 connected region.A. R.K. Rajput NFC IET
DSP Slide a Engr.
Multan](https://image.slidesharecdn.com/lecturedsp2011-0-120918054047-phpapp02/85/Lecture-Digital-Signal-Processing-Batch-2009-115-320.jpg)
![3 - The inverse z-transform
Formally, the inverse z-transform can be performed by evaluating a
Cauchy integral. However, for discrete LTI systems simpler
methods are often sufficient.
A-Inspection method: If one is familiar with (or has a table
of) common z-transform pairs, the inverse can be found by
inspection. For example, one can invert the z-transform
1 1
X ( z) = z
, >
1
− z −
1 2,
1
2
Using Z-transform pair
1
a u[ n ] ←
n
→
z
,........ for z > .
a
1− − az 1
By inspection we recognise that
n
1
x[n] = u[ n ],
2
Also, if X(z) is a sum of terms then one may be able to do a term-by-
term DSP Slide 116 by inspection, A. R.K. Rajput NFC IETas a sum of terms.
inversion Engr. yielding x[n]
Multan](https://image.slidesharecdn.com/lecturedsp2011-0-120918054047-phpapp02/85/Lecture-Digital-Signal-Processing-Batch-2009-116-320.jpg)


![3 - The inverse z-transform Partial fraction expansion
The most general form for partial fraction expansion,
which can also deal with multiple - order poles, is
M-N N
Ak s
Cm
X(z) = ∑B z −r
+ ∑ +∑ .
r =0
r
k =1, k ≠ i 1− dk z −1
m =1 (1 − d z )
i
−1 m
Ways of finding the C m ' s can be found in most standard
DSP texts. The terms B r z −r correspond to shifted and
scaled impulse sequences, and invert to terms of the
form B rδ [n - r]. The fractional term s A k
1 − d k z −1
correspond to exponentia l sequences. For these terms the
ROC properties must be used to decide whether the sequences
are left - sided or right - sided.
DSP Slide 119 Engr. A. R.K. Rajput NFC IET
Multan](https://image.slidesharecdn.com/lecturedsp2011-0-120918054047-phpapp02/85/Lecture-Digital-Signal-Processing-Batch-2009-119-320.jpg)
![Example: inverse by Partial fractions
Consider the sequence x[n] with z - transform
X(z) =
1 + 2z + z
−1
=
−2
1+ z
,
( )
−1 2
z > 1.
3 −1 1 −2
1− z + z
2 2
1 −1
1− z 1− z
2
−1
( )
Since M = N = 2 this can be expressed as
X(z) = B0 + A 1
+ A 2
,
−
1 −1 1−z
1
1− z
2
The value B0 can
found by be long division :
2
1 −2 3 −1 − 2 −1
2z
− z +1) z +2 z +1
2
−2 −1
z −3 z +2
−1
5z −1
−1
- 1 +5 z
X(z) =2 +
DSP Slide 120
1 −
2
1
Engr. A.
−
(
1
− z 1 − z R.K. Rajput NFC IET
1 )
Multan](https://image.slidesharecdn.com/lecturedsp2011-0-120918054047-phpapp02/85/Lecture-Digital-Signal-Processing-Batch-2009-120-320.jpg)
![Example: inverse by Partial fractions
The coecients A and A can be found using
A = (1 − d z ) X ( z ) d .
1 2
−1
k k z=
k
So
−1 −2
1 +2 z + z 1 +4 +4
A 1
=
1 −z
−1
−1
=
1 −2
=−9
z =1
−1 −2
1 +2 z + z 1 +2 + 1
and A = = =9
2
1 −1 1/ 2
1− z
2 z
−1
=1
9 8
There fore X(z) =2 - + −
1 −1 1 −z
1
1− z
2
Using the fact that the ROC z >1. , the terms can be inverted one at a time
by inspection to give
x[ n ] = 2δ[ n ] − 9(1 / 2) n u[ n].
DSP Slide 121 Engr. A. R.K. Rajput NFC IET
Multan](https://image.slidesharecdn.com/lecturedsp2011-0-120918054047-phpapp02/85/Lecture-Digital-Signal-Processing-Batch-2009-121-320.jpg)
![C- Power Series Expansion
If Z transform is given as power series in form
∞
X (z ) = ∑ [ n] z
−n
x
n= ∞
−
2 2
=.................. +[ − ] z +x[ − ] z 1 +x[0] +x[1] z 1 +[ 2] z ......
2 1
then any value in the sequence can be found by identifying the
coefficient of the appropriate power of z-1.
DSP Slide 122 Engr. A. R.K. Rajput NFC IET
Multan](https://image.slidesharecdn.com/lecturedsp2011-0-120918054047-phpapp02/85/Lecture-Digital-Signal-Processing-Batch-2009-122-320.jpg)

![Example; Power Series Expansion by long division
Consider the transform
1
X (z ) = , z >a
1− −
az 1
Since the ROC is the exterior of a circle, the sequence is right-sided. We therefore
divide to get a power series1in powers of z-1:
1 + az + a z
− 2 -2
X ( z ) = 1 − az −1
1
1 − az −1
−1
az
az − a z
−1 2 −2
a 2 z − 2 + .....
1
= 1 + az + a z + ........Therefore..............x[n] = a u[n].
−1 2 -2 n
1 − az −1
DSP Slide 124 Engr. A. R.K. Rajput NFC IET
Multan](https://image.slidesharecdn.com/lecturedsp2011-0-120918054047-phpapp02/85/Lecture-Digital-Signal-Processing-Batch-2009-124-320.jpg)
![Example; Power Series Expansion for left-side Sequence
Consider the Z- transform
1
X (z ) = −
, z <a
1−az 1
Because of the ROC, the sequence is now a left-sided one. Thus we
divide to obtain a series in powers of z:
−
-a 1
z −a z -2 2..
−a +z z
z −a − z 2
1
az −1
Thus..............x[ n] =− n u[ − − ].
a n 1
DSP Slide 125 Engr. A. R.K. Rajput NFC IET
Multan](https://image.slidesharecdn.com/lecturedsp2011-0-120918054047-phpapp02/85/Lecture-Digital-Signal-Processing-Batch-2009-125-320.jpg)
![4- Properties of the z-transform
if X(z) denotes the z-transform of a sequence x[n] and the ROC of X(z) is
indicated by Rx, then this relationship is indicated as
x[ n] ←→ ( z ),
X
z
ROC Rx
Furthermore, with regard to nomenclature, we have two sequences such
that[ n ] ←
x1 X 1 ( z ),
z
→ ROC R x1
x2 [ n] ← X 2 ( z ),
z
→ ROC R x2
A—Linearity: The linearity property is as follows:
ax1[n] + bX 2 (n) ← z aX 1[ z ] + bX 2 ( z ),
→ ROC contains R x1 ∩ R x1 .
B—Time Shifting: The time shifting property is as follows:
x[n − n0 ] ← z z X ( z ),
→
− n0
ROC R x
(The ROC may change by the possible addition or deletion of z =0 or z = ∞.)
This is easily shown:
∞ ∞
Y ( z ) = ∑x[ n −n ] z
n =−∞ 0
−n
= ∑x[ m] z
n =−∞
− m +n0 )
(
∞
= z 126∑x[ m] z A. R.K. z NFC IET z ).
DSP
Slide
−n0
Engr.
n =−∞
= X(Rajput
Multan
−m −n0](https://image.slidesharecdn.com/lecturedsp2011-0-120918054047-phpapp02/85/Lecture-Digital-Signal-Processing-Batch-2009-126-320.jpg)
![Example: shifted exponential sequence
Consider the z-transform
1 1
X ( z) = , z >
1 4
z−
4
From the ROC, this is a right-sided sequence. Rewriting,
z −1 1 1
X ( z) = ,= z −1
z >
1 −1 1 - 1 z −1 4
1− z
4 4
The term in brackets corresponds to an exponential sequence (1/4) nu[n]. The
factor z-1 shifts this sequence one sample to the right.
The inverse z-transform is therefore
x[n] = (1 / 4) u[n − 1] .
n −1
DSP Slide 127 Engr. A. R.K. Rajput NFC IET
Multan](https://image.slidesharecdn.com/lecturedsp2011-0-120918054047-phpapp02/85/Lecture-Digital-Signal-Processing-Batch-2009-127-320.jpg)
![C- Multiplication by an exponential sequence
The exponential multiplication property is
z0 x[n] ← z X [ z / z0 ],
n
→ ROC zR,
0 x
where the notation z 0 Rx , indicates that the ROC is scaled by z (that is, 0
inner and outer radii of the ROC scale by z ). All pole-zero locations are
0
similarly scaled by a factor z0: if X(z) had a pole at z = then X(z/z0)
z 1
will have a pole at z=z0z1.
•If z0 is positive and real, this operation can be interpreted as a shrinking or
expanding of the z-plane | poles and zeros change along radial lines in the z-
plane.
If z0 is complex with unit magnitude (z0 = ejw0) then the scaling operation
corresponds to a rotation in the z-plane by and angle w 0, That is, the poles and
zeros rotate along circles centered on the origin. This can be interpreted as a
shift in the frequency domain, associated with modulation in the time domain
by ejw0n. If the Fourier transform exists, this becomes
e x[n] ← → X ( e ).
jω 0 n F j (ω − ω 0 )
DSP Slide 128 Engr. A. R.K. Rajput NFC IET
Multan](https://image.slidesharecdn.com/lecturedsp2011-0-120918054047-phpapp02/85/Lecture-Digital-Signal-Processing-Batch-2009-128-320.jpg)
![Example: exponential multiplication
The z-transform pair
1
u[n] ← z
→ , z >1
1− z −1
can be used to determine the z-transform of x[n] = r n cos(w0n)u[n].
Since cos (w0n) = 1/2ejw0n + 1/2e –jw0n. The signal can be written as
u[ n] + (re )n u[ n].
1 1
x[ n ] = (r )
jω n −ω
j
2
e 0
2
0
From the exponential multiplication property,
1 1/ 2
(r e jω )n u[ n] ←
0
z
→ jω
, z >r.
2 1 −r e z −1 0
1 1/ 2
(r e−jω )n u[ n] ←
0
z
→ −jω
, z >r .
2 1 −r e z −1 0
So
1/ 2 1/ 2
X(z) = + z >r.
1 −r e jω z −1
1 −r e−jω z −
0 1 0
1 −r cos ωz −1
0
, z >r .
DSP 1 −2r
Slide 129 cos ωz
0
−1
+r 2 z Rajput NFC IET
Engr. A. R.K.−2
Multan](https://image.slidesharecdn.com/lecturedsp2011-0-120918054047-phpapp02/85/Lecture-Digital-Signal-Processing-Batch-2009-129-320.jpg)
![D- Differentiation
The differentiation property states that
dX ( z )
nx[ n] ←z →−z
, ROC = R x .
dz
This can be seen as follows: since
∞
∑
X ( z ) = x[ n ] z −,
n
n=
-∞
We have
dX ( z ) ∞
−z = − z ∑ (− n) x[n]z −n−1 = ∑ nx[n]z −n = z{nx[n]}.
dz n = −∞
Example: second order pole
The z-transform of the sequence x[n] = na n u[n]
Can be found 1
a u[ n] ←
n
z
→ z >a,
1 −z −1
to be
d 1 az − 1
X(z) =- −
= , z >a.
DSP Slide 130
dz 1 −az Multan −az )(1
Engr. A. R.K. Rajput NFC IET− 2
1 1](https://image.slidesharecdn.com/lecturedsp2011-0-120918054047-phpapp02/85/Lecture-Digital-Signal-Processing-Batch-2009-130-320.jpg)
![E- Conjugation
This property is
x * [n] ← z → X * ( z*),
ROC = R x .
F- Time reversal.
1
Here x * [−n] ←z →X * (1 / z*),
ROC = .
Rx
The notation 1/Rx means that the ROC is inverted, so if Rx is the set
of values such that rR < z <rL , then the ROC is the set of values of z su
that 1 / r l z < 1/rR .
Example: Time-reversed exponential sequence
The Signal x[ n ] = a −n u[ − ] is a time-reversed version of a nu[n]. The
n
z-transform is therefore
1 −a z −1 −1
X ( z) = = , z < a = Rx.
−1
1 − az 1 − a z
−1 −1
DSP Slide 131 Engr. A. R.K. Rajput NFC IET
Multan](https://image.slidesharecdn.com/lecturedsp2011-0-120918054047-phpapp02/85/Lecture-Digital-Signal-Processing-Batch-2009-131-320.jpg)
![G- Convolution
This property state that
x1[n] * x2 [n] ← z X 1 ( z ) X 2 ( z ),
→ ROC contains R x1 R x2 .
1
Here x * [−n] ←z →X * (1 / z*),
ROC = .
Rx
Example: evaluating a convolution using the z-transform
The z-transforms of the signal x1[n] =anu[n] and x2[n] = u[n] are
∞
1
∑
X 1 ( z) = a n z − = n
, z >a
n=0 1− az − 1
and
∞
1
.X 2 ( z) = ∑− = z n , z > 1
n= 0 1− az −
1
For a < , The z-transforms of the convolution y[n] = x 1[n] *x2[n] is
1
1 z2
Y ( z) = = z >1
(1 −az )(1 −az ) ( z −a )( z − )
−1 −1
1
1 Engr. A. R.K. Rajput NFC IET z 2
(z =
Y DSP ) Slide 132 = z >1
(1 −az )(1 −az ) ( z −a )( z − )
−1 − Multan
1
1](https://image.slidesharecdn.com/lecturedsp2011-0-120918054047-phpapp02/85/Lecture-Digital-Signal-Processing-Batch-2009-132-320.jpg)
![Example: evaluating a convolution using the z-transform
Using a partial fraction expansion,
1 1 a
Y ( z) = - 1
, z >1
(1 − a ) 1 − z 1 − az
−1 −
So
1
y ( n) = (u[n] − a n+1u[n]).
1 −a
H- Initial Value theorem
If x[n] is zero for n<0, then
x[0] = lim X ( z ).
z→∞
DSP Slide 133 Engr. A. R.K. Rajput NFC IET
Multan](https://image.slidesharecdn.com/lecturedsp2011-0-120918054047-phpapp02/85/Lecture-Digital-Signal-Processing-Batch-2009-133-320.jpg)







![Other forms of Fourier Series
Representation
As we have just mentioned
∞
x(t ) = ∑ c k e j2 πkF0t
k = −∞
The above equation can be re-written as
[ ]
∞
x(t ) = c0 + ∑ c k e j 2πkF0t + c − k e j 2π ( − k ) F0t
k =1
since c k = c k e jθk and c −k = c k e − jθk
[ ]
∞
∴ x(t ) = c 0 + ∑ c k e j ( 2πkF0t +θk ) + e − j ( 2πkF0t +θk )
k =1
∞
This is called the Cosine
= c0 + 2∑ c k cos( 2πkF0 tRajput NFC IET
Engr. A. R.K. + θk ) 141
k =1 Multan Fourier Series.](https://image.slidesharecdn.com/lecturedsp2011-0-120918054047-phpapp02/85/Lecture-Digital-Signal-Processing-Batch-2009-141-320.jpg)
![Other forms of Fourier Series
Representation
Yet another form for the Fourier Series can be obtained by
expanding the cosine Fourier series as
∞
x(t ) = c 0 + 2∑ c k [ cos 2πkF0 t cos θk − sin 2πkF0 t sin θk ]
k =1
Consequently, we may rewrite the above equation in
the form
∞
∴ x(t ) = a0 + ∑ ( a k cos 2π kF0 t − bk sin 2π kF0 t )
k =1
This is called the Trigonometric form of the FS,
where a0 = co, ak = 2|ck|cosθRajput NFC IET k = 2|ck|sinθ k.
Engr. A. R.K. k
and b 142
Multan](https://image.slidesharecdn.com/lecturedsp2011-0-120918054047-phpapp02/85/Lecture-Digital-Signal-Processing-Batch-2009-142-320.jpg)










![The Fourier Series for Discrete-Time Signals
Suppose that we are given a periodic sequence with
period N. The Fourier series representation for x[n]
consists of N harmonically related exponential
functions
ej2πkn/N, k = 0, 1,2,…….,N-1
and is expressed as
N−1
x[n ] =∑ k e j 2 πkn / N
c
k=0
where the coefficients ck can be computed as:
1 ∞
c k = ∑ [n]e −j2 πkn / N
x
N n =0
Engr. A. R.K. Rajput NFC IET 153
Multan](https://image.slidesharecdn.com/lecturedsp2011-0-120918054047-phpapp02/85/Lecture-Digital-Signal-Processing-Batch-2009-153-320.jpg)
![Example: Determine the spectra of the following signals:
(a) x[n] = [1, 1, 0, 0], x[n] is periodic with period 4 (b) x[n] = cosπn/3
(c) x[n] = cos(√2)πn
Solution: (a) x[n] = [1, 1, 0, 0]
↑
N−1
1 1 3
ck = ∑ x[n]e = ∑ x[n]e
− j2πkn/ N − j2πkn/ N
N n=0 4 n=0
1 3 1 1 1
c0 = ∑ x[n] = [ x[0] + x[1] + x[2] + x[3]] = [ 1 + 1 + 0 + 0] =
4 n=0 4 4 2
Now
1 3 1 3 1
c1 = ∑x[n]e − j 2π n / 4
= ∑x[n]e − jπ n / 2 = x[0] + x[1]e − jπ / 2 + 0 + 0
4 n =0 4 n =0 4
1 1 1
= 1 + 1( cos 2 − j sin 2 ) = 1 + ( 0 − j ) = ( 1 − j )
π π
4 4
4
Engr. A. R.K. Rajput NFC IET 154
Multan](https://image.slidesharecdn.com/lecturedsp2011-0-120918054047-phpapp02/85/Lecture-Digital-Signal-Processing-Batch-2009-154-320.jpg)
![[1 + 1 .e ]
3 3
1 1 1
c2 = ∑ x[ n ]e j2 π 2 n / 4
= ∑ x[ n ]e jπ n
= jπ
4 n= 0 4 n= 0 4
1
= [ 1 + cos π − j sin π ] = 0
4
1 3 − j2 π n 3 / 4 1 1 1
c 3 = ∑ x[n]e = [ 1 + cos( 3π / 2) − j sin( 3π / 2)] = [ 1 + 0 + j] = [ 1 + j]
4 n= 0 4 4 4
The magnitude spectra are:
c0 =
1
c1 =
4
2
c2 = 0 c3 =
4
2
2
and the phase spectra are:
Φ0=0 Φ1 =
−π
4 Φ 2 = undefined Φ3 =
π
4
Engr. A. R.K. Rajput NFC IET 155
Multan](https://image.slidesharecdn.com/lecturedsp2011-0-120918054047-phpapp02/85/Lecture-Digital-Signal-Processing-Batch-2009-155-320.jpg)
![(b) x[n] = cosπn/3
Solution: In this case, f0 = 1/6 and hence x[n] is periodic with
fundamental period N = 6.
Now
1 5 1 5 πn − j 2πkn / 6 1 5 πn
c k = ∑ x[n]e − j 2πkn / N
= ∑ cos e = ∑ cos e − jπkn / 3
6 n= 0 6 n= 0 3 6 n= 0 3
6 n= 0 2
[ +e e ] = ∑e
12 n = 0
+e [
1 5 1 jπ n / 3 − jπn / 3 − jπkn / 3 1 5 j π3n ( 1− k ) − j π3n ( 1+ k )
= ∑ e ]
1 5 πn 1 5 πn
∴ c0 = ∑ 2 cos = ∑ cos
12 n= 0 3 6 n= 0 3
1
= [ cos 0 + cos π3 + cos 23π + cos 33π + cos 43π + cos 53π ] = 0
6
Similarly, c2 = c3 = c4 = 0, NFC1IET c5 = ½.
Engr. A. R.K. Rajput c = 156
Multan](https://image.slidesharecdn.com/lecturedsp2011-0-120918054047-phpapp02/85/Lecture-Digital-Signal-Processing-Batch-2009-156-320.jpg)

![Power density Spectrum of Periodic Signals
The average power of a discrete time periodic signal with period N is
N −1
1
∑ x ( n)
2
Px =
N n =0
The above relation may also be written as
1 N −1 1 N −1 N −1 * − 2 πkn / N
Px = ∑ x[n]x [n] = ∑ x[n] ∑ ck e
*
N n=0 N n=0 n=0
or
1
N−1 N−1
Px =∑ c *
k ∑ [n]e
x −j 2 π / N
kn
n=0 N n=0
N−1 2 N−1
1
=∑ k ∑x[n]
2
c =
k=0 N n=0
This is Parse Val's Theorem for Discrete-Time Power Signals.
Engr. A. R.K. Rajput NFC IET 158
Multan](https://image.slidesharecdn.com/lecturedsp2011-0-120918054047-phpapp02/85/Lecture-Digital-Signal-Processing-Batch-2009-158-320.jpg)
![The Fourier Transform of Discrete-Time Aperiodic
Signals
The Fourier Transform of a finite energy discrete time signal x[n] is defined as
∞
X( w ) = ∑ x[n]e
n = −∞
− jwn
X(w) may be regarded as a decomposition of x[n] into its Frequency
components. It is not difficult to verify that X(w) is periodic with frequency
2π.Indeed,X(ω) is periodic with period 2π,that is,
∞
X (ω+2π ) = ∑ (n )e −j (ω 2π ) n
k x + k
n= ∞
−
∞
................... = ∑ (n )e −jω e −j 2π
x n kn
n= ∞
−
∞
∑( )
. = Multann e −jω
....................Engr. A. R.K. Rajput NFC IETn
n= ∞
−
x = X (ω) 159](https://image.slidesharecdn.com/lecturedsp2011-0-120918054047-phpapp02/85/Lecture-Digital-Signal-Processing-Batch-2009-159-320.jpg)

![π
∞
2π ( n)........m = n
x
∑
n =−∞
x ( n) ∫ e jω( m −n ) dω =
0.........m ≠ n
−π
π
1
x (n) = ∫
2π −π
X (ω)e jωn dω
Energy Density Spectrum of Aperiodic Signals
Energy of a discrete time signal x[n] is defined as
∞ 2
Ex = ∑x[n]
n =−∞
Let us now express the energy Ex in terms of the spectral characteristic
X(w). First we have
∞ ∞
1 π ∗
E x = ∑ x[n]x [n] = ∑ x[n] ∫ X ( w )e − jwn dw
*
n = −∞ n = −∞ 2π −π
If we interchange the order of integration and summation in the above
equation, we obtain
1 π ∗ ∞ − jwn 1 π 2
Ex =
2π ∫−π X (w )n∑ x[A. R.K. Rajputdw = 2π ∫−π X(w ) dw
Engr. n ]e
=−∞ Multan NFC IET
161](https://image.slidesharecdn.com/lecturedsp2011-0-120918054047-phpapp02/85/Lecture-Digital-Signal-Processing-Batch-2009-161-320.jpg)
![Therefore, the energy relation between x[n] and X(w) is
2 π 2
∞
1
E x = ∑ x[n] = ∫π X(w ) dw
n = −∞ 2π −
This is Parse Val's relation for discrete-time aperiodic signals.
Engr. A. R.K. Rajput NFC IET 162
Multan](https://image.slidesharecdn.com/lecturedsp2011-0-120918054047-phpapp02/85/Lecture-Digital-Signal-Processing-Batch-2009-162-320.jpg)
![Example: Determine and sketch the energy density
spectrum of the signal x[n] = anu[n],
-1<a<1
Solution:
( )
∞ ∞ ∞
1
∑ x[n]e− jwn = ∑ ane− jwn = ∑ ae− jw =
n
X( w ) =
n= − ∞ n= 0 n= 0 1 − ae − jw
The energy density spectrum (ESD) is given by
2 1
S xx ( w ) = X( w ) = X( w )X∗ ( w ) =
(1 − ae )(1 + ae )
− jw jw
1
X(w) =
1 − 2a cos w + a 2
a = 0.5 a= -0.5
Engr. A. R.K. Rajput NFC IET
w 163
π 0 Multan π](https://image.slidesharecdn.com/lecturedsp2011-0-120918054047-phpapp02/85/Lecture-Digital-Signal-Processing-Batch-2009-163-320.jpg)
![Example: Determine the Fourier Transform and the energy
density spectrum of the sequence
,
A 0 ≤n ≤L −1
x[n ] =
0, otherwise
Solution:
∞ L−1
1 − e − jwL − j( w / 2 )( L − 1 ) sin( wL / 2)
X( w ) = ∑ x[n]e − jwn = ∑ Ae − jwn
n= − ∞ 0
=A
1− e − jw
= Ae
sin( w / 2)
The magnitude of x[n] is
A L, w =0
X( w ) =
A sin( wL/ /22 ) , otherwise
sin( w )
and the phase spectrum is
∠ X( w ) = ∠ A − ∠ (L − 2) + ∠ w
2
sin( wL / 2 )
sin( w / 2 )
The signal x[n] and its magnitude is plotted on the next slide. The
Engr. A. R.K. Rajput NFC IET 164
Phase spectrum is left as an exercise.
Multan](https://image.slidesharecdn.com/lecturedsp2011-0-120918054047-phpapp02/85/Lecture-Digital-Signal-Processing-Batch-2009-164-320.jpg)
![x[n]
|X(w)|
Engr. A. R.K. Rajput NFC IET 165
Multan](https://image.slidesharecdn.com/lecturedsp2011-0-120918054047-phpapp02/85/Lecture-Digital-Signal-Processing-Batch-2009-165-320.jpg)
![Properties of DTFT
Symmetry Properties:
Suppose that both the signal x[n] and its transform X(w) are complex
valued. Then they can be expressed as
x[n] = xR[n] + j xI[n] (1)
X(ω) = XR(ω) + j XI(ω) (2)
The DTFT of the signal x[n] is defined as
∞
X (ω =
) ∑x[ n]e −jω
n= ∞
−
n (3)
Substituting (1) and (2) in (3) we get
∞
X R (ω ) + jX I (ω ) = ∑ [ x R [n] + x I [n]]e − jωn
n = −∞
but
− jωn
e = cos ωn − j sin ωn
Engr. A. R.K. Rajput NFC IET 166
Multan](https://image.slidesharecdn.com/lecturedsp2011-0-120918054047-phpapp02/85/Lecture-Digital-Signal-Processing-Batch-2009-166-320.jpg)
![∞
∴ X R (ω ) + jX I (ω ) = ∑ [x
n = −∞
R
[n] + x I [n]].[ cos ω n − j sin ω n]
separating the real and imaginary parts, we have
∞
X R (ω) = ∑[ x
n =−∞
R [n] cos ωn + x I [ n] sin ωn ] (4)
∞
X I (ω ) = − ∑ [ x R (ω ) sin ωn − x I [n] cos ωn] (5)
n = −∞
In a similar manner, one can easily prove that
1
x R [ n] =
2π 2
∫[ X
π
R (ω) cos ωn − X I (ω) sin ωn]dω
1
x I [ n] =
2π ∫[ X
π
2
R (ω) sin ωn + X I (ω) cos ωn ]dω
Engr. A. R.K. Rajput NFC IET 167
Multan](https://image.slidesharecdn.com/lecturedsp2011-0-120918054047-phpapp02/85/Lecture-Digital-Signal-Processing-Batch-2009-167-320.jpg)
![DTFT Theorems and Properties
• Linearity
If x1[n] ↔ X1(w) and x2[n] ↔ X2(w), then
a1x1[n] + a2x2[n] ↔ a1X1(w) + a2X2(w)
Example 1: Determine the DTFT of the signal
x[n] = a|n| , -1< a <1
Solution: First, we observe that x[n] can be expressed as
x[n] = x1[n] + x2[n]
where
Engr. A. R.K. Rajput NFC IET 168
Multan](https://image.slidesharecdn.com/lecturedsp2011-0-120918054047-phpapp02/85/Lecture-Digital-Signal-Processing-Batch-2009-168-320.jpg)
![a n , n ≥ 0 a − n , n < 0
x1[n] = and x 2 [n] =
0, n < 0 0, n ≥ 0
( )
∞ ∞ ∞
∑ x1[n]e = ∑a e = ∑ ae − jω
− jωn − jωn n
Now X 1 (ω) =
n
n =−∞ n =0 n =0
= 1 + ae − jω + ( ae − jω ) + ( ae − jω ) + .... =
2 3 1
1 − ae − jω
∑ ( ae )
∞ −1 −1
and X 2 (ω ) = ∑ x2 [n]e − jω n
= ∑a e − n − jω n
= jω − n
n = −∞ n = −∞ n = −∞
ae jω
( )
∞
= ∑ ae jω k
= ae jω +( ae jω ) 2 +... =
k =0 1 −ae jω
Now
1 ae jω 1− a2
X (ω ) = X 1 (ω ) + X 2 (ω ) = − jω
+ jω
=
1 − ae 1 − ae 1 − 2a cos ω + a 2
Engr. A. R.K. Rajput NFC IET 169
Multan](https://image.slidesharecdn.com/lecturedsp2011-0-120918054047-phpapp02/85/Lecture-Digital-Signal-Processing-Batch-2009-169-320.jpg)
![• Time Shifting
If x[n] ↔ X(ω) then x[n-k] = e-jωkX(ω)
∞
Proof: F [ x[n − k ]] =
∑
n= − ∞
x[n − k ]e − jω n
Let n – k = m or n = m+k
∞ ∞
∴ F [ x[n − k ]] = ∑ x[m]e − jω ( m + k )
= e − jwk ∑ x[m]e − jω m
= e − jω k X (ω )
m = −∞ m = −∞
• Time Reversal property
If x[n] ↔ X(ω) then x[-n] ↔ X(-ω)
Proof:
∞ −∞ ∞
F [ x[− n]] = ∑ x[− n]e − jω n
= ∑ x[m]e jω m
= ∑ x[m]e − j (− ω m)
= X (− ω )
n= − ∞ m= ∞ m= − ∞
Engr. A. R.K. Rajput NFC IET 170
Multan](https://image.slidesharecdn.com/lecturedsp2011-0-120918054047-phpapp02/85/Lecture-Digital-Signal-Processing-Batch-2009-170-320.jpg)

![• Convolution Theorem
If x1[n] ↔ X1(ω) and x2[n] ↔ X2(ω)
then
x[n] = x1[n]*x2[n] ↔ X (ω) = X1(ω)X2(ω)
Proof: As we know[convolution formula]
∞
x[n] = x1[n] * x 2 [n] = ∑ x [k ]x [n − k ]
k=−∞
1 2
Therefore ∞ ∞
∞ − jω n
X (ω ) = ∑ x[n]e
n = −∞
− jω n
= ∑ ∑ x1 [k ]x 2 [n − k ]e
n = −∞ k = −∞
Interchanging the order of summation and making a substitution
n-k = m, we get ∞
∞
X (ω = ∑ 1 [ k ] ∑ 2 [ m] −jω( m +k )
) x x e
k= ∞
− =−
m ∞
∞ −jω ∞ m
= ∑ 1 [ k ]e
x k
∑ x 2 [ m]e −jω = X 1 (ω X 2 (ω
) )
=−
k ∞ =−
m ∞
If we convolve two signal in time domain, then this is equivalent to
multiplying their spectra in frequency domain.
Engr. A. R.K. Rajput NFC IET 172
Multan](https://image.slidesharecdn.com/lecturedsp2011-0-120918054047-phpapp02/85/Lecture-Digital-Signal-Processing-Batch-2009-172-320.jpg)
![• Example 2: Determine the convolution of the sequences
x1[n] = x2[n] = [1, 1, 1]
As known X 1 (ω ) = X 2 (ω ) = 1 + 2 cos(ω )
Solution: ∞ 1
X 1 (ω ) = X 2 (ω ) = ∑ x [n]e
n = −∞
1
− jω n
= ∑ x [n]e
n = −1
1
− jω n
[ jω
= x1[− 1]e + x1[0] + x2 [1]e − jω
] = [e jω − jω
+ 1 + e ] = 1 + 2 cos ω
Then X(ω) = X1(ω)X2(ω) = (1 + 2cosω)2 =1 + 4cosω+ 4(cosω)2 .
= 1 + 4cosω+ 4(1+cos2ω/2) = 1 + 4cosω+ 2(1+cos2ω).
= 1 + 4cosω+ 2+2cos2ω).
= 3 + 4cos ω + 2cos2ω
= 3 + 2(ejω + e-jω) + (ej2ω + e-j2ω)
Hence the convolution of x1[n] and x2[n] is
x[n] = [1 2 3 2 1]
Engr. A. R.K. Rajput NFC IET 173
Multan](https://image.slidesharecdn.com/lecturedsp2011-0-120918054047-phpapp02/85/Lecture-Digital-Signal-Processing-Batch-2009-173-320.jpg)
![• The Wiener-Khintchin Theorem:
Let x[n] be a real signal. Then rxx[k] ↔Sxx(w)
In other words, the DTFT of autocorrelation function is
equal to its energy density function.*
Proof: The autocorrelation of x[n] is defined as
∞
rxx [ n] = ∑x[k ]x[k − n]
k =−∞
∞
∞
Now F [ rxx [n]] = ∑
n =−∞
∑
k =−∞
x[ k ] x[ k − n]e − jwn
Re-arranging the order of summations and making
Substitution m = k-n we get
∞
∞
F [rxx [n]] = ∑ x[k ] ∑ x[m] e − jw ( k − m )
Engr. A. R.K. Rajput NFC
k = −∞ m = −∞ IET 174
Multan](https://image.slidesharecdn.com/lecturedsp2011-0-120918054047-phpapp02/85/Lecture-Digital-Signal-Processing-Batch-2009-174-320.jpg)
![ ∞ ∞ jω m
= ∑ x[k ]e − ∑ x[m]e = X (ω ) X (−ω ) =| X (ω ) | 2 = S xx ( ω )
jω k
k = −∞ m = −∞
• Frequency Shifting:
Displacement in frequency multiplies the time/space function by a
unit phasor which has angle proportional to time/space and to the
amount of displacement.
If
x[ n] ↔ X (ω)
then
e jw0 n x[ n] ↔ X (ω −ω0 )
jω n
As from above property, multiplication of a sequence x(n) bye o
is equivalent to a frequency translation of the spectrum X(w)
by wo. So it be periodic, The shift ωo applies to the spectrum of
the signal in every period Engr. A. R.K. Rajput NFC IET 175
Multan](https://image.slidesharecdn.com/lecturedsp2011-0-120918054047-phpapp02/85/Lecture-Digital-Signal-Processing-Batch-2009-175-320.jpg)
![• The Modulation Theorem:
If x[n] ↔ X(w) then
x[n] cosω0[n] ↔ ½X(ω + ω0) + ½X(ω - ω0)
Proof: Multiplication of a time/space function by a
cosine wave splits the frequency spectrum of the
function.
Half of the spectrum shifts left and half shifts right.
This is simply a variant of the shift theorem
which makes use of Euler'sjx relationship
−
jx
e +e
∴cos( x) =
2
∞ ∞
e jω0 n + e − jω0 n − jωn Use
F [ x[n] cos ω 0 n] = ∑ x[n] cos ω ne
0
− jωn
= ∑ x[n] e frequenc
n = −∞ n = −∞ 2 y shift
property
Engr. A. R.K. Rajput NFC IET 176
Multan](https://image.slidesharecdn.com/lecturedsp2011-0-120918054047-phpapp02/85/Lecture-Digital-Signal-Processing-Batch-2009-176-320.jpg)
![• The Modulation Theorem: If x[n] ↔ X(w) then
x[n] cosω0[n] ↔ ½X(ω + ω0) + ½X(ω - ω0)
Proof:
e jω 0n + e − jω 0 n − jω n
Use frequency shift property ∞ ∞
F [ x[n] cos ω 0 n] = ∑ x[n] cos ω 0 ne − jω n = ∑ x[n] e
n = −∞ n = −∞ 2
[ ]
∞
1
= ∑x[ n] e
− j (ω− 0 ) n
ω − j (ω+ 0 )
ω
+e
2 n =−∞
∞ ∞
= X (ω + ω 0 ) + (ω − ω 0 )
1 1 1 1
= ∑ x[n]e + ∑ x[n]e
− j (ω + ω 0 ) n − j (ω − ω 0 ) n
2 n = −∞ 2 n = −∞ 2 2
Engr. A. R.K. Rajput NFC IET 177
Multan](https://image.slidesharecdn.com/lecturedsp2011-0-120918054047-phpapp02/85/Lecture-Digital-Signal-Processing-Batch-2009-177-320.jpg)
![• Parseval’s Theorem:
If x1[n] ↔ X1(w) and x2[n] ↔ X2(w) then
∞ π
1
∑
n =−∞
x1 [n]x* [n] =
2 ∫
2π −π
X1 ( w ) X* ( w )dw
2
π π
1 1 ∞ − jω n *
Proof: R.H .S . = ∫π X 1 ( ω ) X 2 ( ω ) dω = 2π −∫π n∑−∞ x1 [ n]e X 2 (ω )dω
*
2π − =
∞ π ∞
1
= ∑ x1 [n] ∫ X 2 (ω)e
* − jωn
dω = ∑ x1 [n]x 2 [n] = L.H .S
*
n =−∞ 2π −π n =−∞
In the special case where x1[n] = x2[n] = x[n], the Parseval’s
Theorem reduces to ∞ 2 π 2
1
∑ ( n)
x =
2π−∫ X (ω dω
)
n= ∞
− π
We observe that the LHS of the above equation is energy E x
of the Signal and Engr. A. R.K. Rajput NFC IET
the R.H.S is equal to the energy
density spectrum. Multan
178](https://image.slidesharecdn.com/lecturedsp2011-0-120918054047-phpapp02/85/Lecture-Digital-Signal-Processing-Batch-2009-178-320.jpg)
![Thus we can re-write the above equation as
∞ 2 π π
1 1
E x = ∑ [ n] ∫ X (ω dω= ∫S xx (ω dω
2
x = ) )
n= ∞
− 2π −π 2π −π
• Multiplication of two sequences: [Windowing
Theorem]
Windowing isX1(ω) process[n] ↔ X2(ω)a small subset of a larger
If x1[n] ↔ the and x2 of taking then
dataset, for processing and analysis. A naive approach, the
rectangular window, involves simply truncating the dataset before
and after the window, while not modifying the contents of the
window at all. However, as we will see, this is a poor method of
windowing and causes power leakage.
π
1
X 1 (λ)X ( − )dλ
ω λ
2π∫
x1 [ n] x 2 [ n] ↔ 2
π
−
Application of a window to a dataset will alter the spectral
properties of that dataset. In a rectangular window, for instance, all
the data points outside the window are truncated and therefore
assumed to be zero. The cut-off points atIET ends of the sample will
Engr. A. R.K. Rajput NFC
the
introduce high-frequency components Multan
179](https://image.slidesharecdn.com/lecturedsp2011-0-120918054047-phpapp02/85/Lecture-Digital-Signal-Processing-Batch-2009-179-320.jpg)

If x1[n] ↔ X1(ω) and x2[n] ↔ X2(ω) then
π
1
x1 [ n] x 2 [ n] ↔
2π−∫X 1 (λX 2 (ω λdλ
π
) − )
Proof:
∞ ∞ 1 π
F [ x1[n]x2 [n]] = ∑ x [n]x [n]e
1 2
− jω n
= ∑ ∫π X 1 ( λ )e dλ x 2 [n]e − jω n
jλ n
n= − ∞ n = −∞ 2π −
π π
1 ∞ − j (ω − λ ) n 1
=
2π −
∫π X 1 ( λ )dλ n∑ x2 [n]e
= −∞
= 2π
−
∫π X ( λ ) X
1 2 (ω − λ )dλ
Show periodic Convolution
Technique use for FIR filter design
Engr. A. R.K. Rajput NFC IET 180
Multan](https://image.slidesharecdn.com/lecturedsp2011-0-120918054047-phpapp02/85/Lecture-Digital-Signal-Processing-Batch-2009-180-320.jpg)
![• Differentiation in the Frequency Domain:
If x[n] ↔ X(w) then Fnx[n] ↔ jdX(w)/dw
Differentiation of a function induces a 90° phase shift in the
spectrum and scales the magnitude of the spectrum in proportion
to frequency. Repeated differentiation leads to the general result:
Proof: dX (ω ) d ∞ − jωn
∞
d
dω
=
∑
dω n =−∞
x[ n]e = ∑ x[n] e − jωn
n =−∞ dω
dX (ω ) ∞
∴ = − j ∑ nx[n]e − jωn
dω n = −∞
Multiplying both sides by j we have
dX (ω) ∞
dX (ω )
j = ∑nx[ n]e − jωn OR j = F [nx[n]]
dω n =−∞ dω
This theorem explains why differentiation of a signal has the reputation
for being a noisy operation. Even if the signal is band-limited, noise will
introduce high frequency Engr. A. R.K. Rajput NFC IET are greatly amplified by
signals which
differentiation. Multan 181](https://image.slidesharecdn.com/lecturedsp2011-0-120918054047-phpapp02/85/Lecture-Digital-Signal-Processing-Batch-2009-181-320.jpg)
![The Frequency Response Function:
The response of any LTI system to an arbitrary input
signal x[n] is given by convolution sum Formula
∞
y[n ] =∑ ]x[n − ]
h[k k (6)
k =∞
−
In this I/O relationship, the system is characterized
in the time domain by its unit impulse response
h[k]. To develop a frequency domain
characterization of the system, let us excite the
system with the complex exponential
x[n] = Aejwn. -∞ < n < ∞ (7)
where A is the amplitude and w is an arbitrary frequency
confined to the frequency interval [-π, π]. By substituting
(7) into (6), we obtain the response NFC IET
Engr. A. R.K. Rajput 182
Multan](https://image.slidesharecdn.com/lecturedsp2011-0-120918054047-phpapp02/85/Lecture-Digital-Signal-Processing-Batch-2009-182-320.jpg)
![[ ]
∞
y[n] = ∑ h[k ] Ae jw ( n −k )
k = −∞
∞ − jwk jwn
= A ∑h[k ]e e
k =−∞
or
y[n] = AH( w )e jwn
(8)
where ∞
H( w ) = ∑h[k ]e −jwk
k =−∞
(9)
The exponential Aejwn is called an Eigen-function of
the system. An Eigen function of a system is an input
signal that produces an output that differs from the
input by a constant multiplicative factor. The
multiplicative factor is called an Eigen-value of the
System. Engr. A. R.K. Rajput NFC IET
Response is also in form of complex exponential with same frequency as input, but altered by the multiplicative factor H(w).
Multan 183](https://image.slidesharecdn.com/lecturedsp2011-0-120918054047-phpapp02/85/Lecture-Digital-Signal-Processing-Batch-2009-183-320.jpg)
![Example: Determine the magnitude and phase of H(w)
for the three point moving average(MA) system
y[n] = 1/3[x[n+1] + x[n] + x[n-1]]
Solution: since h[n] = [1/3, 1/3, 1/3]
It follows that
H(w) = 1/3(ejw +1 + e-jw) = 1/3(1 + 2cosw)
Hence
|H(w)| = 1/3|1+2cosw| and
0, 0 ≤ w ≤ 2 π / 3
Φ (w ) =
π , 2π / 3 ≤ w < π
Engr. A. R.K. Rajput NFC IET 184
Multan](https://image.slidesharecdn.com/lecturedsp2011-0-120918054047-phpapp02/85/Lecture-Digital-Signal-Processing-Batch-2009-184-320.jpg)

![Example:An LTI system is described by
the following difference equation:
y[n] = ay[n-1] + bx[n], 0<a<1
(a) Determine the magnitude and phase of
the frequency response H(w) of the system.
(b) Choose the parameter b so that the
maximum value of |H(w)| is unity.
(c) Determine the output of the system to
the input signal
x[n] = 5 + 12sin(π/2)n – 20cos (πn + π/4)
Engr. A. R.K. Rajput NFC IET 186
Multan](https://image.slidesharecdn.com/lecturedsp2011-0-120918054047-phpapp02/85/Lecture-Digital-Signal-Processing-Batch-2009-186-320.jpg)


![For w = π, 1−a
| H( w ) |= = 0.053
1+ a
Θ(π ) = 0
Therefore, the output of the system is
π π π π
y[n] = 5 H(0) + 12 H sin n + Θ − 20 H( π ) cos π n + + Θ ( π )
2 2 2 4
= 5 + 0.888 sin( n − 42 ) − 1.06 cos( π n + )
π
2
0 π
4
Engr. A. R.K. Rajput NFC IET 189
Multan](https://image.slidesharecdn.com/lecturedsp2011-0-120918054047-phpapp02/85/Lecture-Digital-Signal-Processing-Batch-2009-189-320.jpg)
![Response to A-periodic input signals
Consider the LTI system of the following figure
where x[n] is the input, and y[n] is the output.
x[n] y[n]
LTI System
h[n], H(w)
If h[n] is the impulse response of the system, then
y[n] = h[n]*x[n]
The corresponding frequency domain representation is
Y(w) = H(w)X(w) [
Corresponding Fourier transform of the y(n),x(n), & h(n) respectively]
Now the squared magnitude of both sides is given by
|Y(w)|2 = |H(w)|2|X(w)|2
Or
Syy(w) = |H(w)|2Sxx(w)
where Sxx(w) and Syy(w) are the energy density spectra of the
input and output signals, respectively. IET
Engr. A. R.K. Rajput NFC 190
Multan](https://image.slidesharecdn.com/lecturedsp2011-0-120918054047-phpapp02/85/Lecture-Digital-Signal-Processing-Batch-2009-190-320.jpg)
![The energy of the output signal is
π π
1 1
Ey = ∫πS yy ( w )dw = ∫π| H( w ) | S xx ( w )dw
2
2π − 2π −
Example: An LTI system is characterized by its
impulse response h[n] = (1/2)nu[n]. Determine the
spectrum and the energy density spectrum of
the output signal when the system is excited by the
signal x[n] = (1/4)nu[n].
Solution: ∞ n
1
H( w ) = ∑ ( 1 ) e − jwn =
n=0
2
1 − 1 e − jw
2
1
Similarly, X( w ) =
1 − 1 e −jw
4
Hence the spectrum of the signal at the output of the system
is Engr. A. R.K. Rajput NFC IET 191
Multan](https://image.slidesharecdn.com/lecturedsp2011-0-120918054047-phpapp02/85/Lecture-Digital-Signal-Processing-Batch-2009-191-320.jpg)

![DTFT and DFT
• The DTFT of an aperiodic discrete time
signal is defined as
∞ (1)
X [ w] = ∑x[ n]e − jwn
n =−∞
• The DFT of a signal is defined as
N −1
X(k ) = ∑ x[n]e − jk 2 πn / N (2)
n =0
• Inverse DFT is defined as
N −1
1
x[n] =
N
∑ X [k ]e
k =0
j 2πkn / N
(3)
What is difference between DTFT and DFT?
Engr. A. R.K. Rajput NFC IET 193
Multan](https://image.slidesharecdn.com/lecturedsp2011-0-120918054047-phpapp02/85/Lecture-Digital-Signal-Processing-Batch-2009-193-320.jpg)
![• The DFT is periodic with period N.
N −1
Proof: X[k ] = ∑ x[n]e − jk 2 πn / N
n=0
N− 1
X[k + N] = ∑ x[n]e − j( k + N ) 2 π n / N
n= 0
N −1
= ∑x[n]e −jk 2 πn / N e −j2 πn
n =0
Since e-j2πn = 1
N−1
∴ X[k + N] = ∑ x[n]e − jk 2 πn / N
n= 0
= X[k ]
proved
Engr. A. R.K. Rajput NFC IET 194
Multan](https://image.slidesharecdn.com/lecturedsp2011-0-120918054047-phpapp02/85/Lecture-Digital-Signal-Processing-Batch-2009-194-320.jpg)
![Example 1: Find the DFT of the following sequence
[1 0 0 1]
N −1 3 3
X[k ] = ∑ x[n]e − jk 2 πn / N = ∑ x[n]e − jk 2 πn / 4 = ∑ x[n]e − jkπn / 2
n=0 n=0 n=0
3
X[0] = ∑x[n] = x[0] + x[1] + x[2] + x[ 3] = 1 + 0 + 0 +1 = 2
i =0
3
X[1] = ∑x[n]e − jkπn / 2 = x[0] + 0 + 0 + x[3]e − j3 π / 2
n =0
− j3 π / 2
= 1 + 1.e = 1 + cos( 32π ) − j sin( 32π ) = 1 + j
3
X [2] = ∑ x[n]e − jπn = x[0] + x[3]e − j 3π = 1 +1.[cos(3π ) − j sin ( 3π ) ] = 0
n =0
n=0
X [3] = ∑ x[n]e − j 3πn / 2 = x[0] + x[3]e − j 9π / 2 = 1 − j
3
Engr. A. R.K. Rajput NFC IET 195
Multan](https://image.slidesharecdn.com/lecturedsp2011-0-120918054047-phpapp02/85/Lecture-Digital-Signal-Processing-Batch-2009-195-320.jpg)
![Example 2: Find the IDFT of the sequence
[2 1+j 0 1-j]
1 N −1
Solution: x[n] = ∑ X[k ]e jk 2πn / N
N k =0
1 N −1 1
x[0] = ∑ X[k ] = [ X[0] + X[1] + X[2] + X[3]]
Now 4 k =0 4
1 3 1 3
x[1] = ∑ X[k ]e jk 2 π / 4
= ∑ X[k ]e jkπ / 2
4 k=0 4 k =0
jπ / 2 jπ j3 π / 2
= X[0] + X[1]e + X[2]e + X[3]e =0
Similarly,
X[2] = 0 and X[3] = 1
Engr. A. R.K. Rajput NFC IET 196
Multan](https://image.slidesharecdn.com/lecturedsp2011-0-120918054047-phpapp02/85/Lecture-Digital-Signal-Processing-Batch-2009-196-320.jpg)
![Computational Complexity of the DFT
A large number of multiplications and
additions are required for the calculation
of the DFT.
Consider an 8-point DFT as given by
7
X[k ] = ∑ x[n]e − jk 2 πn / 8
n= 0
Let k2π/8 = K
7
x[n ] =∑ [n ]e −jKn
x
n=0
x[0]e − jK 0 + x[1]e − jK 1 + x[2]e − jK 2 + x[3]e − jK 3 + x[4]e − jK 4 +
x[5]e − jK 5 + x[6]e − jK 6 + xA.7]eRajput NFC IET
Engr. [ R.K.
− jK 7
Multan
197](https://image.slidesharecdn.com/lecturedsp2011-0-120918054047-phpapp02/85/Lecture-Digital-Signal-Processing-Batch-2009-197-320.jpg)

![Decimation-in-time fast fourier transform
algorithm (Cooley-Tuckey Algorithm):
Notations: Equation (2) can be re-written as
n −1
X1 [k ] = ∑ x n e − j2 πnk / N (4)
N =0
Let WN = e − j2 π / N (5)
( − j 2π / N ) 2 − j 2π /( N / 2 )
Also note that W = [e
2
N ] =e = WN / 2 (6)
and WNk + N / 2 ) = WN WN / 2 = WN e − j( 2 π / N )( N / 2 )
( k N k
=W e k − jπ
N = W ( cos π − j sin π ) = − W
k
N
k
N (7)
Engr. A. R.K. Rajput NFC IET 199
Multan](https://image.slidesharecdn.com/lecturedsp2011-0-120918054047-phpapp02/85/Lecture-Digital-Signal-Processing-Batch-2009-199-320.jpg)
![Summary:
− j2 π / N
WN = e
W = WN / 2
2
N
(k + N / 2)
W N = −W k
N
N−1
DFT: X1 [k ] = ∑ n WN
x kn (8)
n =0
Engr. A. R.K. Rajput NFC IET 200
Multan](https://image.slidesharecdn.com/lecturedsp2011-0-120918054047-phpapp02/85/Lecture-Digital-Signal-Processing-Batch-2009-200-320.jpg)

![Now equation (8) can be re-written as
follows:
N / 2 −1 N / 2 −1
X1 [k ] = ∑ x 2n WNnk +
n =0
2
∑ x 2n +1 WN2n +1)k
n =0
(
N / 2−1 N / 2−1
= ∑ x 2n WN nk + WN
n=0
2 k
∑ x 2n +1 WNnk
n=0
2
since Wn2nk = WN / 2
nk
N / 2−1 N / 2−1
Therefore, X1[k ] = ∑ x 2n W
n=0
nk
N/2 +W k
N ∑
n=0
nk
x 2n + 1 WN / 2
The above equation can be re-written as
X1[k ] = X11[k ] + WN X12 [k ]
k
(9)
Engr. A. R.K. Rajput NFC IET 202
Multan](https://image.slidesharecdn.com/lecturedsp2011-0-120918054047-phpapp02/85/Lecture-Digital-Signal-Processing-Batch-2009-202-320.jpg)
![Considering line 6 of the table it is seen that
X 21[k ] = x 0 + w k
N/4 4x k = 0,1
Thus
X 21[0] = x 0 + x 4
while
− j2 π / 2
X 21[1] = x 0 + WN / 4 x 4 = x 0 + e x4 = x0 − x4
similarly
X 22 [0] =x 2 +x 6 X 22 [1] = x 2 − x 6
X 23 [0] =x1 +x 5 X 23 [1] = x1 − x 5
X 24 [0] =x 3 +x 7 X 24 [1] = x 3 − x 7
We observe that the values with k = 1 differ only by a sign from
those with k = 0.
Engr. A. R.K. Rajput NFC IET 203
Multan](https://image.slidesharecdn.com/lecturedsp2011-0-120918054047-phpapp02/85/Lecture-Digital-Signal-Processing-Batch-2009-203-320.jpg)
![Now X11[k ] = X 21[k ] + WN / 2 X 22 [k ]
k
(10)
(11)
So, X11[0] = X 21[0] + WN / 2 X 22 [0] = X 21[0] + X 22 [0]
0
− jπ / 2
X11[1] = X 21[1] + W X 22 [1] = X 21[1] + e
1
N/2 = X 21[1] − jX 22 [1] (12)
− j( 2 π / 8 ) 2× 2
X11[2] = X 21[2] + W X [2] = X 21[2] + e
2
N / 2 22 X 22 [2] = X 21[2] − X 22 [2] (13)
Now X 21[2] = x 0 + WN / 2 x 4 = x 0 + W22 x 4 = x 0 + x 4 = X 21[0]
2
and X 22 [ 2] = x 2 + WN / 4 x 6 = x 2 + x 6 = X 22 [0]
2
Hence equation (13) is equivalent to
X11 [2] = X 21[0] + X 22 [0] (14)
X11[3] = X 21[3] + WN / 2 XA. R.K. Rajput NFC IET
3
[3] (15)
Engr. 22 204
Multan](https://image.slidesharecdn.com/lecturedsp2011-0-120918054047-phpapp02/85/Lecture-Digital-Signal-Processing-Batch-2009-204-320.jpg)
![Now
X 21[3] = x 0 + WN / 4 x 4 = x 0 + e − j( 2 π / 2 ) 3 x 4 = x 0 + e − j3 π x 4 = x 0 − x 4 = X 21[1]
3
and X 22 [3] = x 2 − x 6 = X 22 [1]
Hence equation (15) is equivalent to
X11[3] = X 21[1] + e − j( 2 π / 4 ) 3 X 22 [1] = X 21[1] + jX 22 [1] (16)
Drawing these results together gives
X11 [0] = X 21 [0] + X 22 [0] = X 21 [0] + W8 X 22 [0]
0
X11 [ 2] = X 21 [0] − X 22 [0] = X 21 [0] − W8 X 22 [0]
0
(17)
X11 [1] = X 21 [1] − jX 22 [1] = X 21 [1] + W8 X 22 [1]
2
X11 [ 3] = X 21 [1] + jX 22 [1] = X 21 [1] − W8 X 22 [1]
2
The above equations are known as recomposition equations.
Engr. A. R.K. Rajput NFC IET 205
Multan](https://image.slidesharecdn.com/lecturedsp2011-0-120918054047-phpapp02/85/Lecture-Digital-Signal-Processing-Batch-2009-205-320.jpg)
![The number of complex additions and
multiplications involved is reduced in this way
because:
(i) the recomposition equations are expressed in
terms of powers of the recurring factor WN.
(ii) use is also made of relationships of the type
X21[2] = X21[0] and X21[3] = X 21[1] and
(iii) the presence of only sign differences in the
pairs of expressions is exploited.
The algorithm is known as the Cooley-Tukey
algorithm.
It can be shown that
Number of complex multiplications = (N/2)log2N
Engr. A. R.K. Rajput NFC IET 206
Multan](https://image.slidesharecdn.com/lecturedsp2011-0-120918054047-phpapp02/85/Lecture-Digital-Signal-Processing-Batch-2009-206-320.jpg)

Here are the solutions to the questions: (a) y[nT] = 3(−0.2)n u[n − 3], T = 2 ms Energy: E = 9(0.2)3/(1−0.2) = 9 Power: P = 0 (since the signal decays to zero as n increases) This is an energy signal. (b) z[nT] = 4(1.1)n u[n + 1], T = 0.02 s Energy: E = ∞ (since (1.1)n increases without bound) Power: P = 4.4 This is a power signal. (c




























![Digital Signal Processor ( DSP ) [French]](https://cdn.slidesharecdn.com/ss_thumbnails/lesdsp-121002052639-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)










































