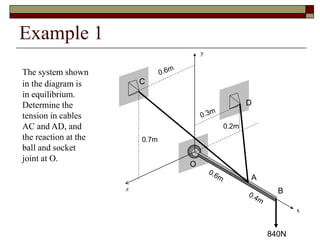
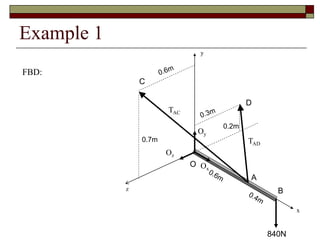
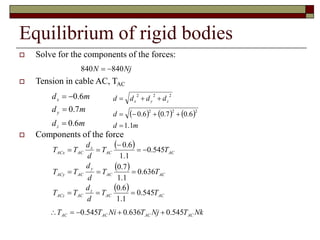
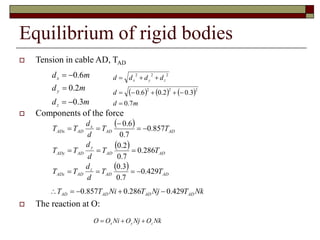
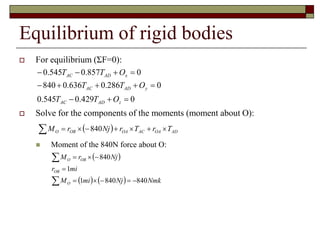
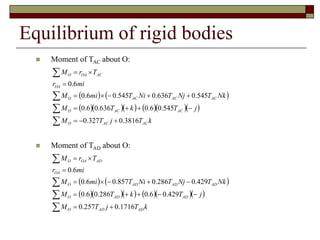
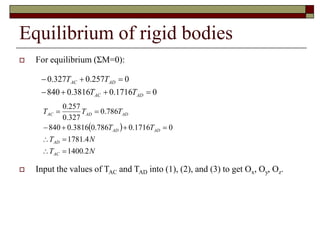
This lecture discusses equilibrium of rigid bodies in 3 dimensions. It covers the equilibrium condition and free body diagram process for 3D rigid bodies. An example problem is presented to demonstrate determining tensions in cables and reaction forces at a ball and socket joint by drawing the free body diagram and applying the equations of equilibrium. Practice is recommended to develop skills in setting up and solving 3D rigid body equilibrium problems.