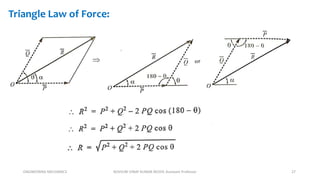
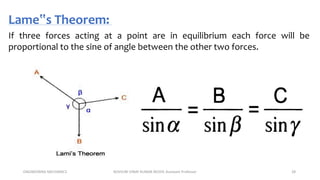
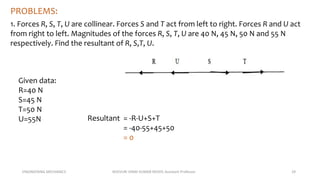
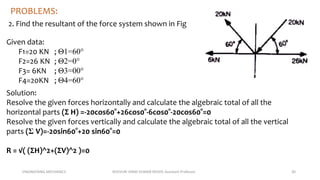
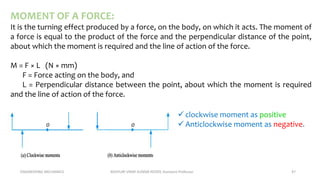
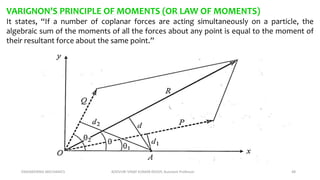
The document is an introduction to engineering mechanics, focusing on forces, their composition, resolution, and the principles governing them. It covers essential laws, concepts like free body diagrams, equilibrium, and the importance of mechanics in engineering applications. The document also includes various problem-solving methods related to forces and moments.