Solutions to Non-linearEquations
False Position Method
1
Dr. Umer Farooq Ahmed
04/10/2025 Capital University of Science and Technology 1
2.
False Position Method
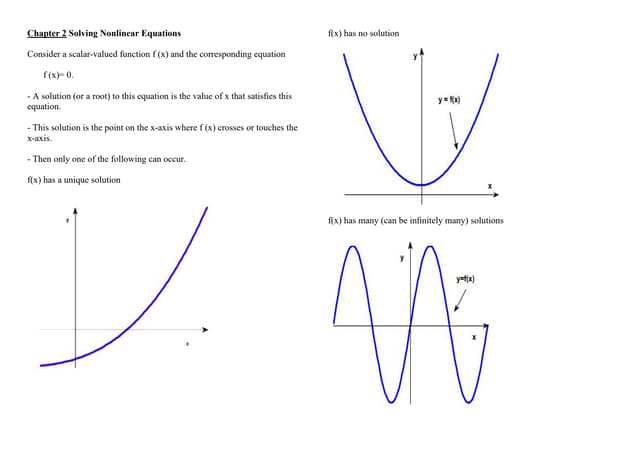
Frequently, as in the case shown in Fig., the function in the
interval [a, b] is either concave up or concave down.
In this case, one of the endpoints of the interval stays the
same in all the iterations, while the other endpoint advances
toward the root.
In other words, the numerical solution advances toward the
root only from one side.
The convergence toward the solution could be faster if the
other endpoint would also "move" toward the root.
Food for thought: How we move other point?
04/10/2025 Capital University of Science and Technology 2
False Position Method
Consider an equation f(x) =
0, which contains only one
variable, i.e. x.
To find the real root of the
equation f(x) = 0, we
consider a sufficiently small
interval (a, b) where a < b
such that f(a) and f(b) will
have opposite signs.
According to the
intermediate value theorem,
this implies a root lies
between a and b.
04/10/2025 Capital University of Science and Technology 4
5.
False Position Method
Also, the curve y = f(x) will
meet the x-axis at a certain
point between A[a, f(a)] and
B[b, f(b)].
Now, the equation of the
chord joining A[a, f(a)] and
B[b, f(b)] is given by:
04/10/2025 Capital University of Science and Technology 5
6.
False Position Method
Let y = 0 be the point of
intersection of the chord
equation (given above) with
the x-axis. Then,
04/10/2025 Capital University of Science and Technology 6
7.
False Position Method
This can be simplified as
Thus, the first approximation
is
x1 = [af(b) – bf(a)]/ [f(b) – f(a)]
04/10/2025 Capital University of Science and Technology 7
8.
False Position Method
Also, x1 is the root of f(x) if
f(x1) = 0.
If f(x1) ≠ 0 and if f(x1) and
f(a) have opposite signs, then
we can write the second
approximation as:
x2 = [af(x1) – x1f(a)]/ [f(x1)
– f(a)]
04/10/2025 Capital University of Science and Technology 8
9.
False Position Method
Similarly, we can estimate x3,
x4, x5, and so on.
Geometrical representation of
the roots of the equation f(x)
= 0 can be shown as:
04/10/2025 Capital University of Science and Technology 9
10.
10
Method of FalsePosition
Find a root of an equation f(x)=2x3-2x-5 using False Position method (Regula
Falsi method)
Solution
Here 2x3-2x-5=0
Let f(x)=2x3-2x-5
x 0 1 2
f(x) -5 -5 7
Approximate root of
the equation 2x3-2x-
5=0 using
False Position
method is 1.60056
False Position Method: Example
Regula- Falsi Method
•Oldest method ( dates back to ancient Egyptians)
• Also known as method of linear interpolation or False
position method.
• Effective alternate to Bisection method.
• Roots convergence is faster than Bisection method.
• Computational efforts are less.
Advantages
13.
Home Tasks
Applybisection Method and regula falsi method and find p3
for f (x)
= x - cos x on [0, 1]. Also compare results
√
Use the Bisection method and Regula Falsi to find solutions
accurate to within 10-2
for x3 - 7x2 + 14x - 6 = 0 on
each interval.
– a. [0, 1]
– b. [1, 3.2]
Also compare results
Use the Bisection method to find solutions, accurate to within 10-5
for the following problems.
3x - ex = 0 for 1 x 2
≤ ≤
2x + 3 cos x - ex = 0 for 0 x 1
≤ ≤
x2 - 4x + 4 - ln x = 0 for 1 x 2 and 2 x 4
≤ ≤ ≤ ≤
13
14.
Error Analysis ofBisection Method
14
04/10/2025 Capital University of Science and Technology 14
15.
What isthe maximum error after n iterations of
bisection method?
How many iterations will be required to obtained the root
to the desired accuracy.
Bisection Method
Bisection Method
16.
12 16
-34.8 17.6
16
-12.617.6
12
14 15
-12.6 1.5
14.5
15
-5.
8
1.5
-34.8
Change
of sign
Change
of sign
17.6
Change
of sign
-12
.6
Change
of
sign
Iter1
Iter2
Iter3
14
16
14
Error Estimate
At the n-th iteration:
endpoints of the inteval
Length of the interval
Iter4
17.
Error Estimates for
Bisection
Atthe iter1:
True root
live inside
this interval
At the iter2:
At the nth iteration:
the absolute
error in the
n-th iteration
Theorem 2.1
16
-12.6 17.6
12
-34.8
Iter1
14
14 15
-12.6 1.5 17.6
Iter2
16
18.
Theorem 2.1
It isimportant to realize that Theorem
2.1 gives only a bound for
approximation error and that this
bound might be quite conservative.
For example,
Remark
1 14.0000 9.0000e-01
2 15.0000 1.0000e-01
3 14.5000 4.0000e-01
4 14.7500 1.5000e-01
5 14.8750 2.5000e-02
6 14.9375 3.7500e-02
7 14.9063 6.2500e-03
8 14.8906 9.3750e-03
9 14.8984 1.5625e-03
Example:
Theorem 2.1
Determine thenumber of iterations
necessary to solve f (x) = 0 with
accuracy 10−2
using a1 = 12 and b1 =
16.
Example
Example:
the desired error
solve for n:
1 14.0000 9.0000e-01
2 15.0000 1.0000e-01
3 14.5000 4.0000e-01
4 14.7500 1.5000e-01
5 14.8750 2.5000e-02
6 14.9375 3.7500e-02
7 14.9063 6.2500e-03
8 14.8906 9.3750e-03
9 14.8984 1.5625e-03
10 14.9023 2.3437e-03
11 14.9004 3.9062e-04
12 14.8994 5.8594e-04
It is important to keep in mind that the error analysis
gives only a bound for the number of iterations. In
many cases this bound is much larger than the actual
number required.
Remark
2
2n
![False Position Method
Frequently, as in the case shown in Fig., the function in the
interval [a, b] is either concave up or concave down.
In this case, one of the endpoints of the interval stays the
same in all the iterations, while the other endpoint advances
toward the root.
In other words, the numerical solution advances toward the
root only from one side.
The convergence toward the solution could be faster if the
other endpoint would also "move" toward the root.
Food for thought: How we move other point?
04/10/2025 Capital University of Science and Technology 2](https://image.slidesharecdn.com/lecture22falsepositionmethod-250410164028-8ee9efda/75/Lecture-2_2-False-Position-Method-pptx-2-2048.jpg)


![False Position Method
Also, the curve y = f(x) will
meet the x-axis at a certain
point between A[a, f(a)] and
B[b, f(b)].
Now, the equation of the
chord joining A[a, f(a)] and
B[b, f(b)] is given by:
04/10/2025 Capital University of Science and Technology 5](https://image.slidesharecdn.com/lecture22falsepositionmethod-250410164028-8ee9efda/75/Lecture-2_2-False-Position-Method-pptx-5-2048.jpg)

![False Position Method
This can be simplified as
Thus, the first approximation
is
x1 = [af(b) – bf(a)]/ [f(b) – f(a)]
04/10/2025 Capital University of Science and Technology 7](https://image.slidesharecdn.com/lecture22falsepositionmethod-250410164028-8ee9efda/75/Lecture-2_2-False-Position-Method-pptx-7-2048.jpg)
![False Position Method
Also, x1 is the root of f(x) if
f(x1) = 0.
If f(x1) ≠ 0 and if f(x1) and
f(a) have opposite signs, then
we can write the second
approximation as:
x2 = [af(x1) – x1f(a)]/ [f(x1)
– f(a)]
04/10/2025 Capital University of Science and Technology 8](https://image.slidesharecdn.com/lecture22falsepositionmethod-250410164028-8ee9efda/75/Lecture-2_2-False-Position-Method-pptx-8-2048.jpg)




![Home Tasks
Apply bisection Method and regula falsi method and find p3
for f (x)
= x - cos x on [0, 1]. Also compare results
√
Use the Bisection method and Regula Falsi to find solutions
accurate to within 10-2
for x3 - 7x2 + 14x - 6 = 0 on
each interval.
– a. [0, 1]
– b. [1, 3.2]
Also compare results
Use the Bisection method to find solutions, accurate to within 10-5
for the following problems.
3x - ex = 0 for 1 x 2
≤ ≤
2x + 3 cos x - ex = 0 for 0 x 1
≤ ≤
x2 - 4x + 4 - ln x = 0 for 1 x 2 and 2 x 4
≤ ≤ ≤ ≤
13](https://image.slidesharecdn.com/lecture22falsepositionmethod-250410164028-8ee9efda/75/Lecture-2_2-False-Position-Method-pptx-13-2048.jpg)