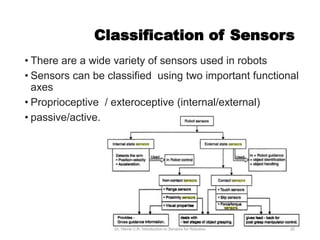
The document discusses sensors for robotics. It begins with an introduction to robotics, including a brief history and overview of robot types. It then discusses the importance of sensors for robots, classifying sensors as proprioceptive/exteroceptive and passive/active. Proprioceptive sensors measure internal robot values while exteroceptive sensors acquire external environmental information. Passive sensors measure ambient energy while active sensors emit and measure energy. The document provides examples of different sensor types and their applications in robotics. It emphasizes that sensors allow robots to operate efficiently by collecting environmental information.