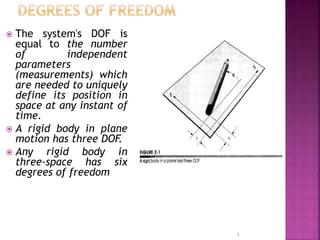
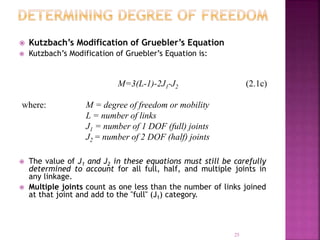
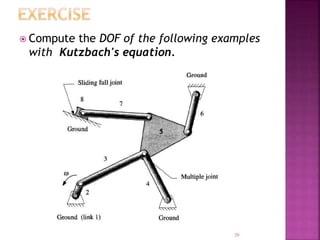
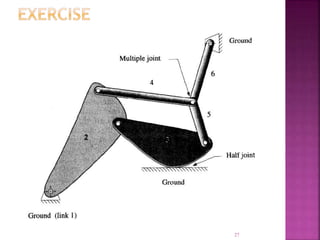
This document provides an overview of kinematics fundamentals including degrees of freedom, types of motion, links, joints, and kinematic chains. It defines key terms and concepts. Degrees of freedom refer to the number of independent parameters needed to define an object's position. Planar rigid bodies have 3 degrees of freedom while bodies in 3D space have 6. Gruebler's and Kutzbach's equations are presented for determining the degrees of freedom of planar mechanisms based on the number of links and joints.