Downloaded 193 times

















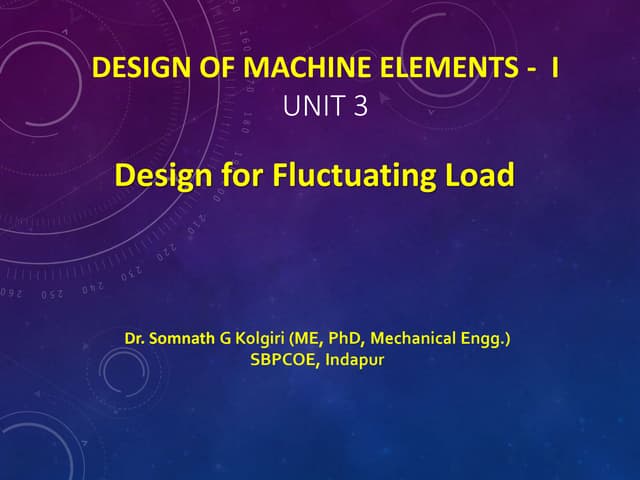
![Macro “Shape.Mac”:
This is the main calculation Macro, where the displacement gradients, Qfunc
gradients, stresses and strain energy density values are computed for the
integration points. Here the nodal values are transformed to integration point values
using element shape functions and a series of matrix operations.
The basic two matrices involved in this macro are JS, JP. From these two matrices
the Jacobian matrix and then the inverse Jacobian matrix are formed. Then through
a series of matrix operations involving the inverse Jacobian matrix, we obtain all the
required values at the integration points. The sequence of matrix operations is
described below.
Input Matrices:
Here, N-shape functions, u-displacements, q- Q Function, σ - Stress, w-strain
energy density, (x, y, z): Global coordinates, (s, t, r): Local element coordinates
JS = [N 1
y1
y2
y3
y4
y5
y6
y7
y8
N3
N4
N5
N6
N7
N8]
⎡ ∂N1
⎢
⎢ ∂s
∂N
JP = ⎢ 1
⎢ ∂t
⎢ ∂N1
⎢
⎣ ∂r
⎡ x1
⎢x
⎢ 2
⎢ x3
⎢
x
JX = ⎢ 4
⎢ x5
⎢
⎢ x6
⎢x
⎢ 7
⎢ x8
⎣
N2
∂N 2
∂s
∂N 2
∂t
∂N 2
∂r
∂N3
∂s
∂N3
∂t
∂N3
∂r
∂N 4
∂s
∂N 4
∂t
∂N 4
∂r
∂N5
∂s
∂N5
∂t
∂N5
∂r
∂N 6
∂s
∂N 6
∂t
∂N 6
∂r
∂N 7
∂s
∂N 7
∂t
∂N 7
∂r
∂N8 ⎤
⎥
∂s ⎥
∂N8 ⎥
∂t ⎥
∂N8 ⎥
⎥
∂r ⎦
1
⎡u1
⎢ 1
⎢u 2
1
⎢u 3
⎢ 1
u
MU = ⎢ 4
⎢u 1
⎢ 5
1
⎢u 6
⎢u 1
⎢ 7
1
⎢u 8
⎣
z1 ⎤
z2 ⎥
⎥
z3 ⎥
⎥
z4 ⎥
z5 ⎥
⎥
z6 ⎥
z7 ⎥
⎥
z8 ⎥
⎦
1
⎡σ 11
⎢ 2
⎢σ 11
3
⎢σ 11
⎢ 4
σ
MS = ⎢ 11
⎢σ 5
⎢ 11
6
⎢σ 11
⎢σ 7
⎢ 11
8
⎢σ 11
⎣
1
σ 22
2
σ 11
3
σ 11
4
σ 11
5
σ 11
6
σ 11
7
σ 11
8
σ 11
1
σ 33
2
σ 11
3
σ 11
4
σ 11
5
σ 11
6
σ 11
7
σ 11
8
σ 11
u12
2
u2
2
u3
2
u4
2
u5
2
u6
2
u7
2
u8
1
σ 12
2
σ 11
3
σ 11
4
σ 11
5
σ 11
6
σ 11
7
σ 11
8
σ 11
1
⎡ q1
⎢ 1
⎢q 2
1
⎢ q3
⎢ 1
q
MQ = ⎢ 4
⎢q1
⎢ 5
1
⎢q 6
⎢q 1
⎢ 7
1
⎢ q8
⎣
u13 ⎤
3⎥
u2 ⎥
3
u3 ⎥
3⎥
u4 ⎥
3
u5 ⎥
⎥
3
u6 ⎥
3
u7 ⎥
⎥
3
u8 ⎥
⎦
1
σ 23
2
σ 11
3
σ 11
4
σ 11
5
σ 11
6
σ 11
7
σ 11
8
σ 11
1
σ 13
2
σ 11
3
σ 11
4
σ 11
5
σ 11
6
σ 11
7
σ 11
8
σ 11
w1 ⎤
2 ⎥
w11 ⎥
3
w11 ⎥
4 ⎥
w11 ⎥
5
w11 ⎥
⎥
6
w11 ⎥
7
w11 ⎥
⎥
8
w11 ⎥
⎦
q12
2
q2
2
q3
2
q4
2
q5
2
q6
2
q7
2
q8
q13 ⎤
3⎥
q2 ⎥
3
q3 ⎥
3⎥
q4 ⎥
3
q5 ⎥
⎥
3
q6 ⎥
3
q7 ⎥
⎥
3
q8 ⎥
⎦
19](https://image.slidesharecdn.com/j-integralreport-140307033739-phpapp02/75/J-integral-report-18-2048.jpg)
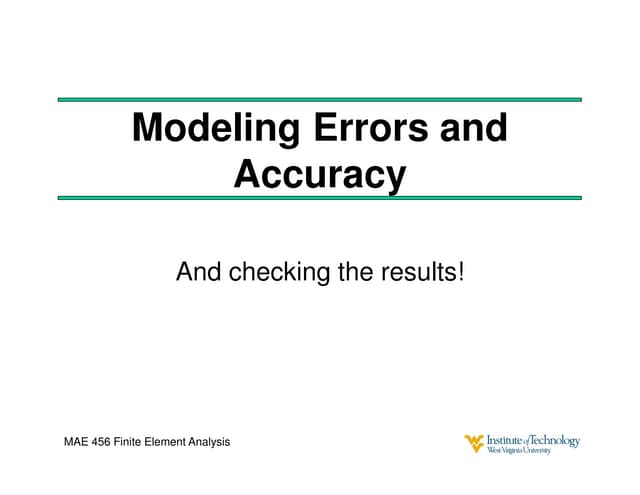
![Matrix Operations:
U
JACO
=
(JP)*(JX)
INV_JACO =
(JACO)-1
MC
=
(INV_JACO)*(JP)
DU
=
(MC)*(MU)
DQ
=
(MC)*(MQ)
MRES
=
(JS)*(MS)
P
Resultant Matrices:
JACO
⎡ ∂x
⎢ ∂s
⎢ ∂x
= ⎢
⎢ ∂t
⎢ ∂x
⎢ ∂r
⎣
∂y
∂s
∂y
∂t
∂x
∂r
⎡ ∂N 1
⎢
⎢ ∂x
∂N
MC = ⎢ 1
⎢ ∂y
⎢
⎢ ∂N 1
⎢ ∂z
⎣
⎡ ∂u 1
⎢ ∂x
⎢
∂u 1
DU = ⎢
⎢ ∂y
⎢ ∂u 1
⎢
⎣ ∂z
MRES
∂z ⎤
∂s ⎥
∂z ⎥
⎥
∂t ⎥
∂x ⎥
∂r ⎥
⎦
∂N 3
∂x
∂N 3
∂y
∂N 3
∂z
∂N 2
∂x
∂N 2
∂y
∂N 2
∂z
∂u 2
∂x
∂u 2
∂y
∂u 2
∂z
= [σ 11
INV _ JACO
∂u 3
∂x
∂u 3
∂y
∂u 3
∂z
σ
22
∂N 4
∂x
∂N 4
∂y
∂N 4
∂z
⎤
⎥
⎥
⎥
⎥
⎥
⎥
⎦
∂N 5
∂x
∂N 5
∂y
∂N 5
∂z
∂N 6
∂x
∂N 6
∂y
∂N 6
∂z
⎡ ∂s
⎢ ∂x
⎢ ∂s
= ⎢
⎢ ∂y
⎢ ∂s
⎢
⎣ ∂z
∂N 7
∂x
∂N 7
∂y
∂N 7
∂z
⎡ ∂q 1
⎢ ∂x
⎢
∂q 1
DQ = ⎢
⎢ ∂y
⎢ ∂q 1
⎢
⎣ ∂z
σ
33
σ 12
σ
23
σ 13
∂t
∂x
∂t
∂y
∂t
∂z
∂N 8
∂x
∂N 8
∂y
∂N 8
∂z
∂q 2
∂x
∂q 2
∂y
∂q 2
∂z
w
∂r
∂x
∂r
∂y
∂r
∂z
⎤
⎥
⎥
⎥
⎥
⎥
⎥
⎦
⎤
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎦
∂q 3
∂x
∂q 3
∂y
∂q 3
∂z
⎤
⎥
⎥
⎥
⎥
⎥
⎥
⎦
]
Thus, as seen above the entire calculations are condensed to only 6 matrix
multiplications per integration point. This matrix method is simple to implement and
leads to faster and very efficient analysis.
20](https://image.slidesharecdn.com/j-integralreport-140307033739-phpapp02/75/J-integral-report-19-2048.jpg)

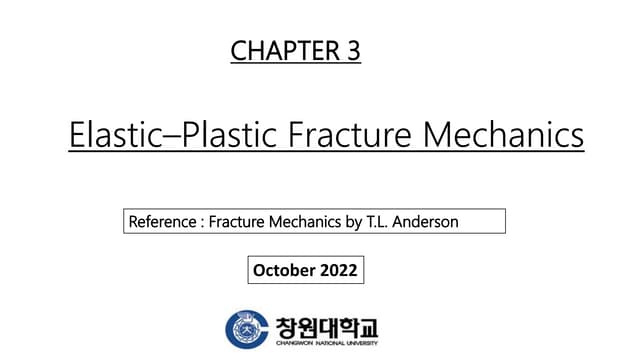
![Experimental Results:
The main objective of this FEM simulation was to verify the previously conducted
experiments for calculation of J-Integral using the unloading compliance technique,
as described in “ASTM Standard E1820-01: Standard Test Method for Measurement
of Fracture Toughness, ASTM 2001”
3D J-integral
180
J-integral (kN/m)
160
140
120
100
Experimental Data
80
60
40
20
0
0
20
40
60
80
Load (kN)
Fig.10.Experimental Results
The experiments were conducted at 1000 C. And hence a tensile test using a video
extensometer was conducted to obtain the stress-strain curve at this temperature.
P
P
Stress - Strain Curve
800
700
stress [MPa]
600
500
400
300
200
100
0
0
0.5
1
1.5
2
2.5
3
3.5
4
total strain [ - ]
Fig.11.True stress strain curve
Fig.12.Side grooved Specimen
It should be noted that, there exist small difference in the specimen and FEM model
structure. The test specimen is side grooved to avoid tunneling and maintain a
straight crack front. However in the FEM model, the model width was reduced to
account for the side groove.
Beff = B −
(B − BN )2
B
22](https://image.slidesharecdn.com/j-integralreport-140307033739-phpapp02/75/J-integral-report-21-2048.jpg)


![Results Comparison
Now the simulation results obtained are compared with the experimental results and
theoretical solutions described earlier.
Results Comparison
250
J-integral (kN/m)
200
Experimental Results
150
Ansys Results
Theoritical (pl. stress)
100
Theoritical (pl. strain)
50
0
0
20
40
60
80
Load (kN)
We can infer the following from the above plot:
1.The experimental and Ansys results are almost identical.
2.The results lie in between the theoretical solutions for plain stress and plain strain
conditions.
3.Within the elastic range of deformation (load less than 40 kN), the results and
theoretical solutions are identical.
The slight deviation in experimental and simulation results may be due to the
following differences:
• The experimental specimen was side grooved to maintain a straight crack
front,
But there is some deformation at the crack front boundaries in the FEM
model.
The material properties of the specimen material and the FEM model vary
slightly. The values inputted to the FEM model where through the RambergOsgood relation.
800
700
600
500
Stress [MPa]
•
400
300
200
100
experimental data
ramberg-osgood fit
0
0
0.05
0.1
0.15
0.2
0.25
0.3
Strain [-]
Fig 13.Plot of experimentally determined stress strain curve and Ramberg-Osgood fit
25](https://image.slidesharecdn.com/j-integralreport-140307033739-phpapp02/75/J-integral-report-24-2048.jpg)



This document discusses the implementation of the Energy Domain Integral method in ANSYS to calculate the 3D J-integral of a Compact Tension fracture specimen. It begins with providing theoretical background on fracture mechanics and the J-integral. It then discusses the contour integral method and weight function approach for numerically calculating the J-integral. The document describes creating a finite element model of a standard CT specimen in ANSYS and implementing the Energy Domain Integral method to calculate the J-integral. It concludes by comparing the ANSYS simulation results to theoretical and experimental results.