Download to read offline



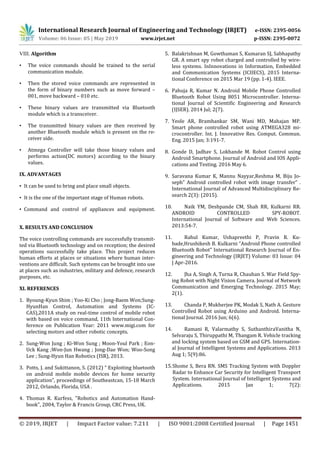

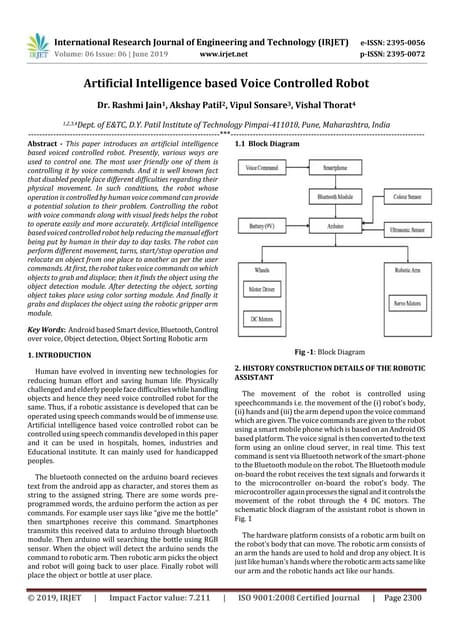
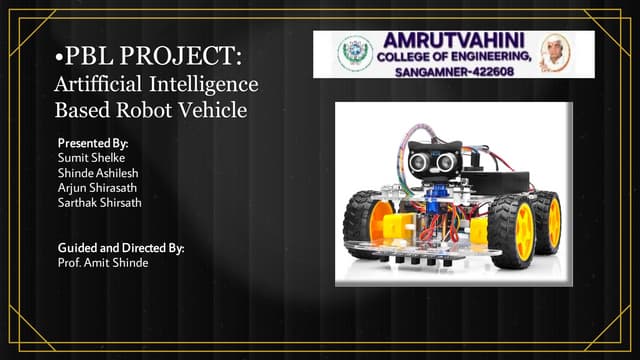
This document describes a voice controlled robotic vehicle that can be operated through voice commands from an Android device. The robotic vehicle is integrated with an Arduino, Bluetooth module, motor driver circuit, ultrasonic sensor, and LCD screen. The Android device sends voice commands to move the vehicle forward, backward, left, or right via Bluetooth. The Arduino then operates the motors to move the vehicle accordingly. An obstacle detector using ultrasonic sensors helps protect the vehicle. The system provides a safer way to complete tasks in hazardous environments compared to using humans.











































![INTERNET OF THINGS [Voice Controlled Robotic Vehicle]](https://cdn.slidesharecdn.com/ss_thumbnails/miniprojectp1-191002070815-thumbnail.jpg?width=640&height=640&fit=bounds)








































