Download to read offline
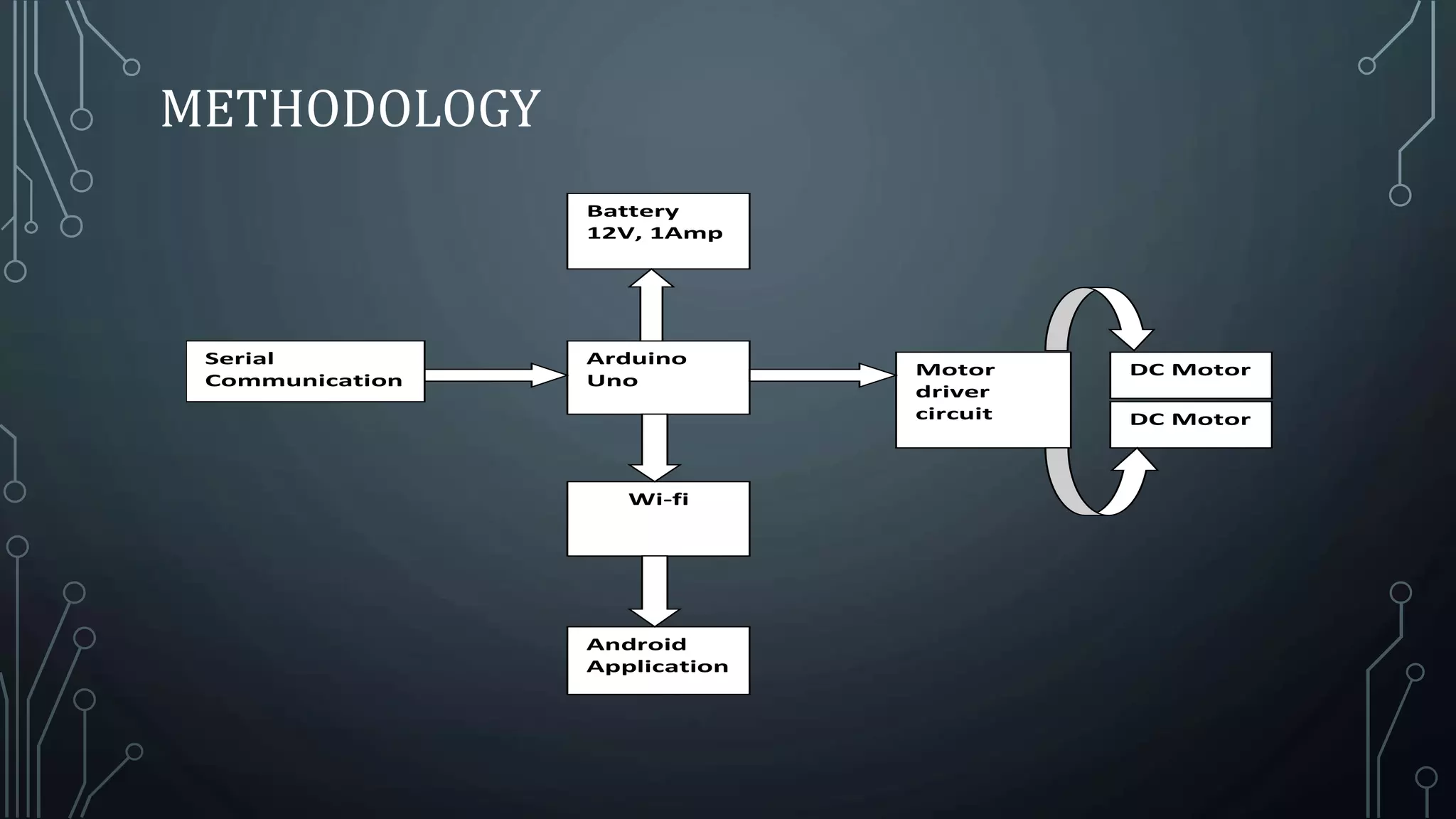

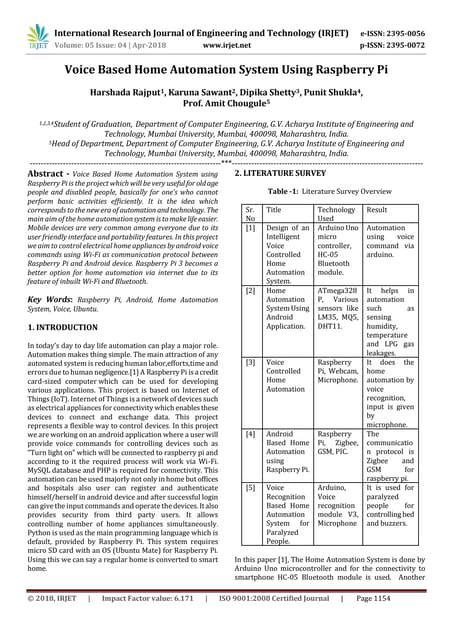
The document introduces a voice-controlled robotic vehicle (VCRV) that operates through an Android application connected via Wi-Fi, allowing users to control it with voice commands. It reviews existing technologies and emphasizes the shift from manual remote control to internet-based systems enhanced with speech recognition capabilities. The proposed system aims for effective human-robot interaction, operational efficiency in various environments, and potential integration of advanced features like cloud database and image processing.