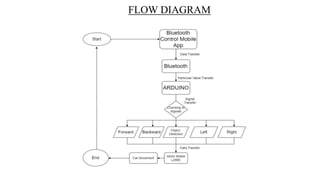
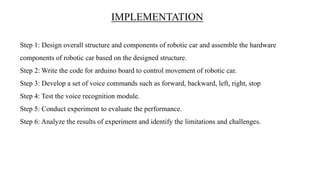
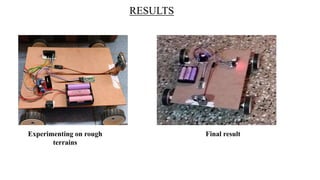
This document describes a project to design a robot using an Arduino board that is controlled by voice commands from an Android device. The objectives are to build a low-cost robot with an Android app interface. The system architecture involves using a microphone on the Android device to recognize voice commands, which are sent via Bluetooth to the Arduino board. The Arduino board controls motors to move the robot in the directions corresponding to the voice commands. The project implements this design and tests voice recognition and robot control. Results show the feasibility of controlling physical objects with just voice commands.