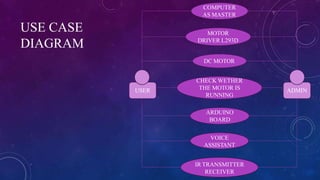
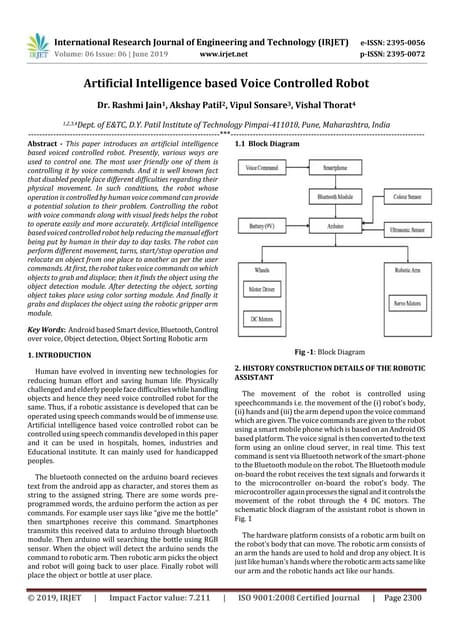
The document presents the development of a semi-autonomous, voice-controlled robot vehicle utilizing IoT and AI technologies, aimed at improving transportation accessibility. It details the system's components, including hardware and software, and highlights its energy efficiency and capabilities, such as obstacle detection. The project contributes to existing knowledge by demonstrating a sustainable, cloud-based approach to autonomous vehicle control for individuals with mobility challenges.



































![5G Explained! A High Level Overview [Introduction]](https://cdn.slidesharecdn.com/ss_thumbnails/5gexplainedahighleveloverview-260119165306-cc137a3e-thumbnail.jpg?width=640&height=640&fit=bounds)
















