Downloaded 15 times

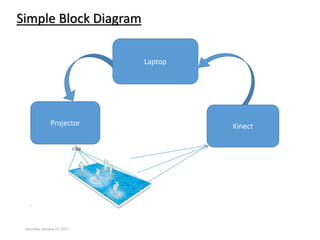
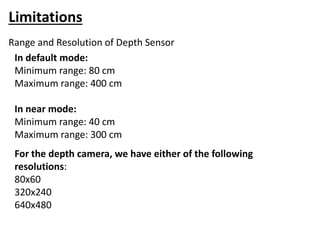
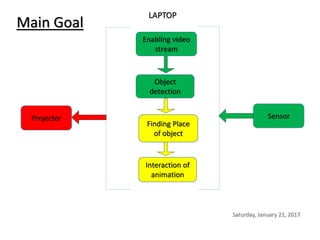
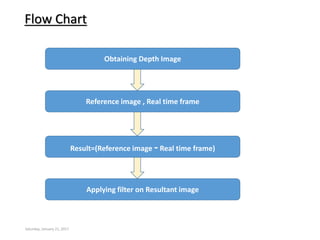
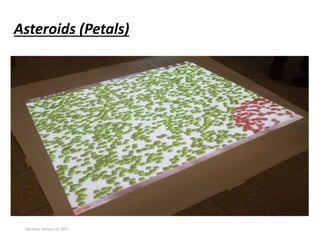
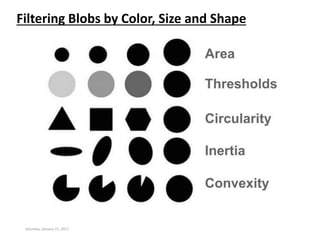

The document outlines a project for creating an interactive floor projection system that uses a Kinect sensor to detect objects and trigger animated visuals on the floor. Key components include software installations, sensor interfacing, and blob detection algorithms for object interaction. It discusses the detailed process of animating and controlling virtual elements in response to user presence, as well as limitations related to range and resolution of sensors.