Downloaded 23 times



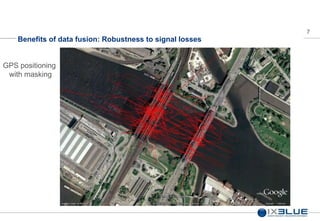

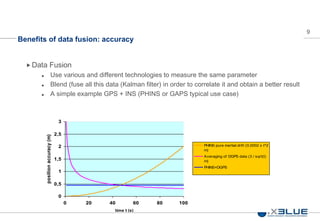
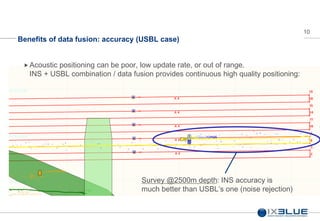


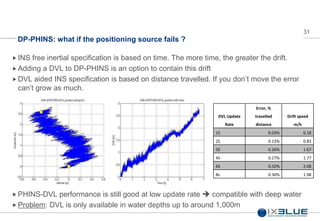
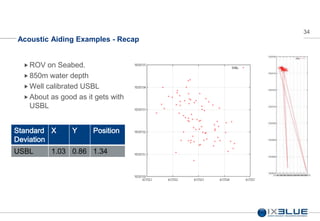
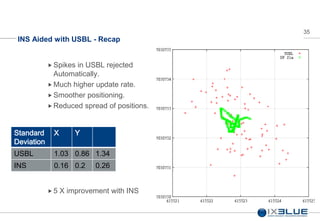
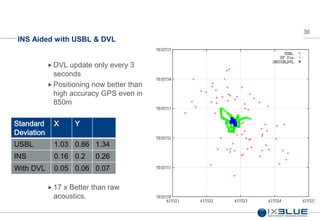
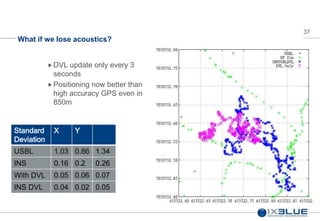

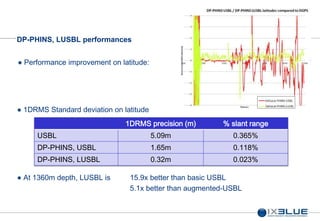

DP-PHINS is an inertial navigation system that enhances underwater acoustic positioning for dynamic positioning applications. It fuses data from multiple sensors, including USBL, DVL, and acoustic beacons, to provide continuous high-quality positioning even during sensor outages or in deep water where individual sensors are less accurate. By combining data from multiple acoustic positioning references, it can reject outliers and noise to improve accuracy beyond what a single sensor could achieve. DP-PHINS is particularly effective when augmented with long baseline positioning using acoustic beacon ranges, as it can take advantage of the greater precision of range measurements compared to angle-only positioning. This provides positioning accuracy up to 15 times better than standard USBL alone.




























































![Sensor Fusion Study - Real World 2: GPS & INS Fusion [Stella Seoyeon Yang]](https://cdn.slidesharecdn.com/ss_thumbnails/gpsins-200817095309-thumbnail.jpg?width=640&height=640&fit=bounds)

























