
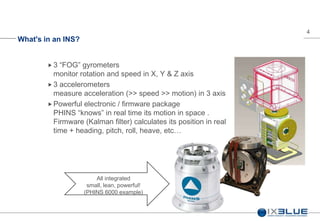
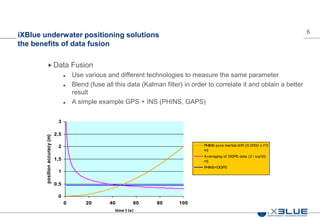
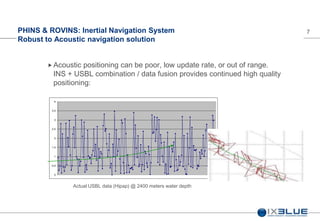
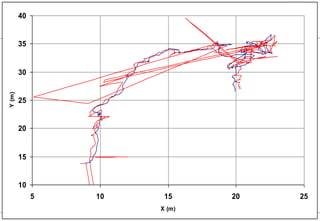
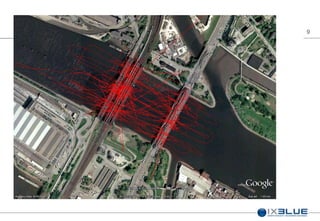

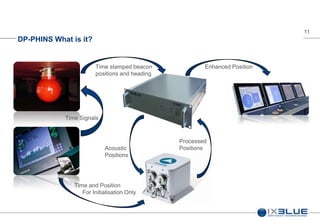
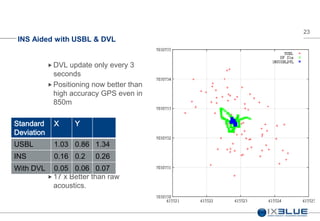

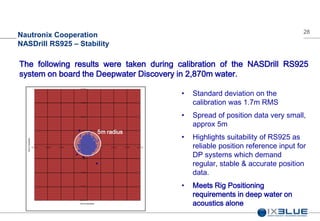
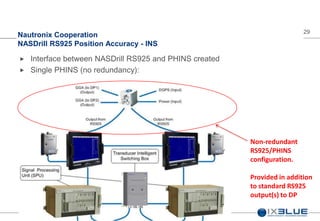
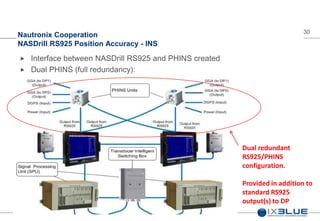

The document discusses inertial navigation systems (INS) and their use in dynamic positioning (DP) applications. An INS uses gyroscopes and accelerometers to continuously calculate position without external references. While INS drift over time, integrating additional sensors like acoustic positioning, Doppler velocity logs, and GPS can significantly improve accuracy through data fusion. The document examines how pairing an INS with acoustic positioning systems can provide reliable, high-accuracy positioning even if individual sensors fail or are unavailable. It suggests INS combined with acoustic loggers is sufficient redundancy and accuracy for many DP applications.
















































![5G Explained! A High Level Overview [Introduction]](https://cdn.slidesharecdn.com/ss_thumbnails/5gexplainedahighleveloverview-260119165306-cc137a3e-thumbnail.jpg?width=640&height=640&fit=bounds)


















