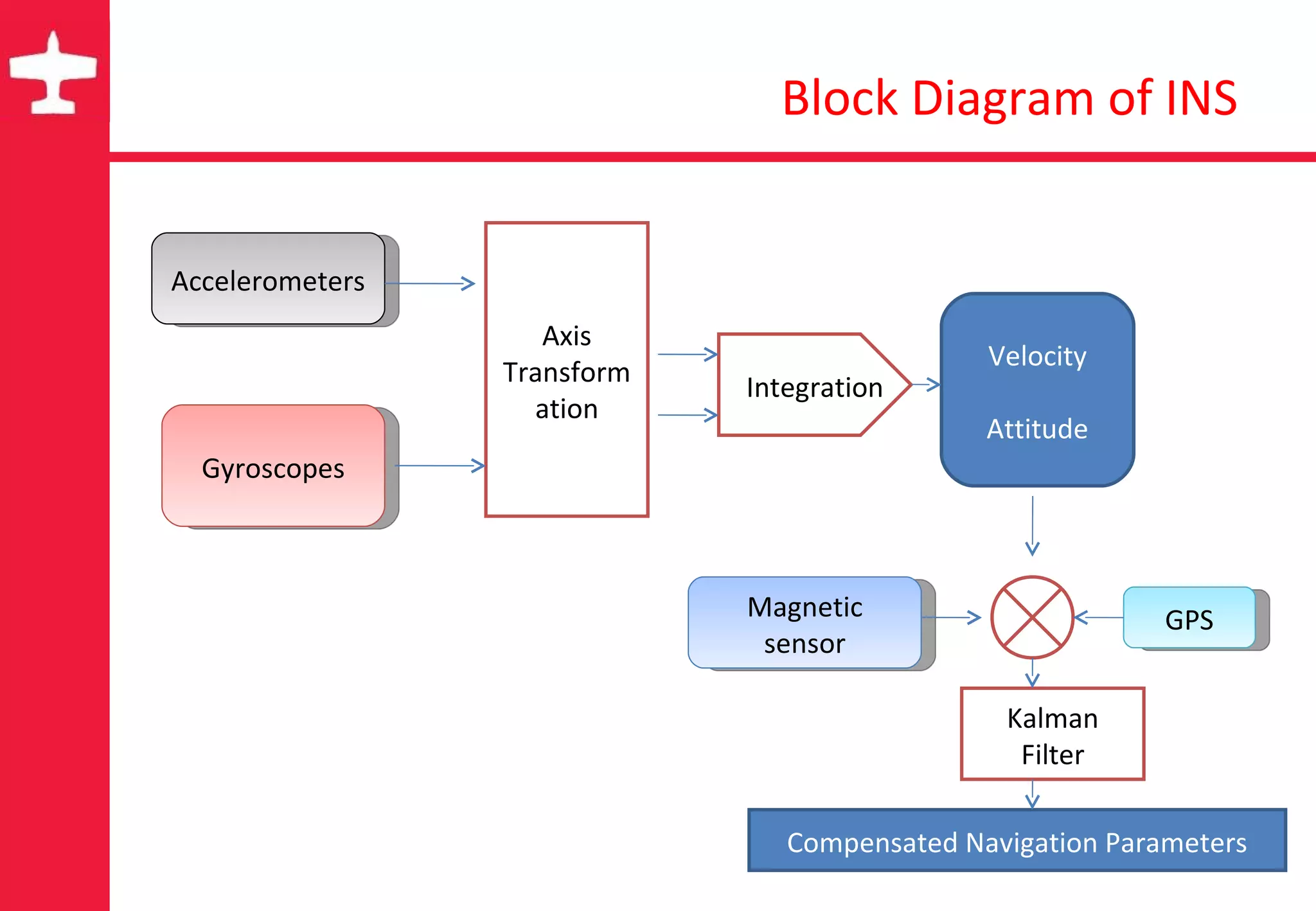
An inertial navigation system uses accelerometers and gyroscopes to calculate a vehicle's position, speed, and orientation in real time without needing external references. It integrates acceleration measurements to determine speed and position over time and integrates angular rate measurements to determine attitude. However, MEMS sensors used in these systems are prone to noise, bias drift from temperature changes, and errors, requiring redundant sensors and techniques like Kalman filtering to compensate.