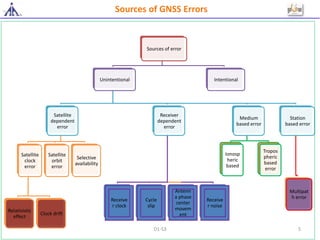
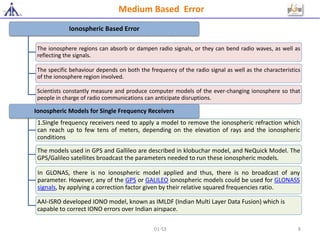
This document discusses GNSS errors, their sources, and mitigation techniques. It describes various unintentional errors from satellite clocks, orbits, and the ionosphere and troposphere. Receiver errors and multipath errors are also discussed. Intentional interference can come from jamming or spoofing. Real-time and post-processing techniques can be used to mitigate errors, such as using ground station corrections or processing with base station data. The goal is to understand error sources and how to apply models or corrections to improve GNSS positioning accuracy.