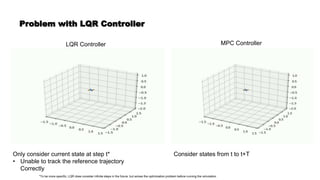
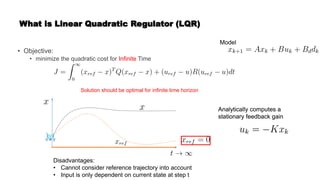
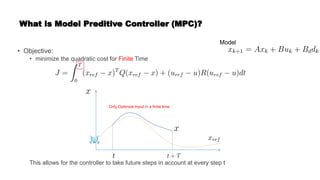
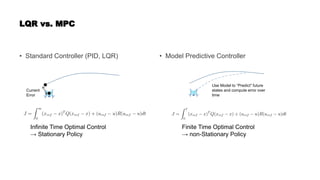
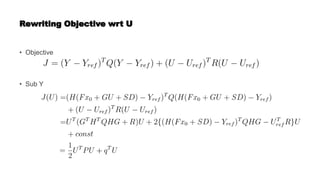
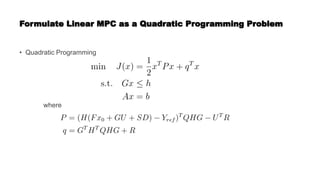
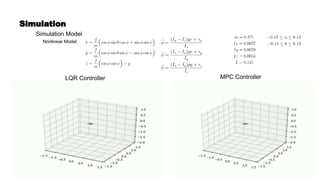
Linear model predictive control (MPC) can track reference trajectories better than LQR control by considering future states over a finite time horizon at each time step. MPC formulates an optimization problem to minimize a quadratic cost function subject to model dynamics and input/state constraints, to compute a non-stationary control policy. This is in contrast to LQR which computes a stationary policy by optimizing over an infinite horizon. MPC allows the controller to "predict" future states using a dynamical model and minimize errors between predicted and reference states/inputs.


![Constraints
• Input Constraints
ex) Let Force be limited within 10 [N]](https://image.slidesharecdn.com/finalproject-200502010834/85/Implementation-of-Model-Predictive-Controller-for-a-drone-10-320.jpg)
![Constraints
• State Constraints
ex) Let max velocity be limited within 10 [m/s]
Rewrite the constraints only with input U](https://image.slidesharecdn.com/finalproject-200502010834/85/Implementation-of-Model-Predictive-Controller-for-a-drone-11-320.jpg)












![Sensor Fusion Study - Ch13. Nonlinear Kalman Filtering [Ahn Min Sung]](https://cdn.slidesharecdn.com/ss_thumbnails/nonlinearkalmanfiltering200717-200815094232-thumbnail.jpg?width=640&height=640&fit=bounds)




![Sensor Fusion Study - Ch7. Kalman Filter Generalizations [김영범]](https://cdn.slidesharecdn.com/ss_thumbnails/ch7kalmanfiltergeneralizations-200715034919-thumbnail.jpg?width=640&height=640&fit=bounds)

![[01] Quantum Error Correction for Beginners](https://cdn.slidesharecdn.com/ss_thumbnails/qecshin-200424065807-thumbnail.jpg?width=640&height=640&fit=bounds)