Right Image plane
LeftImage plane
Essential & Fundamental Matrices
Essential & Fundamental Matrices
e’
e
x
x’
R,T
Y’
X’
Z’
C’
Right optical center
Base Line
X
Y
Z
C
Left optical center
X
World Point
• E = [T]XR
• X’T
EX = 0
• F = C’-T
EC-1
• x’T
Fx = 0
• l’ = Fx
l’
Right Image plane
LeftImage plane
Essential & Fundamental Matrices
Essential & Fundamental Matrices
e’
e
x
x’
R,T
Y’
X’
Z’
C’
Right optical center
Base Line
X
Y
Z
C
Left optical center
X
World Point
• E = [T]XR
• X’T
EX = 0
• F = C’-T
EC-1
• x’T
Fx = 0
• l’ = Fx
l’
Finding Correspondences (Lines)
FindingCorrespondences (Lines)
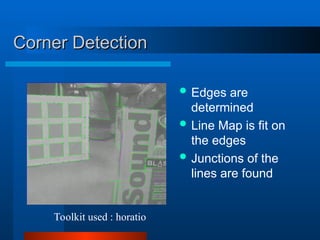
Candidate Lines should have similar
orientation
Images of end-points are got using
the epipolar constraint
An new approach considers
orientation of nearby lines (Amit Garg)
Locating Obstructions
Locating Obstructions
Thereconstructed scene is projected on
the ground plane.
Clustering is done, by deleting long
edges in MST
Each cluster is bounded by its convex
hull
Identification of ground plane. Current implementation projects onto xz
plane of camera co-ordinate system.
TO BE DONE
Needed for Navigation
Neededfor Navigation
Hand-eye calibration: to locate robot
w.r.t. co-ordinate system
Visual Servoing: using visual
feedback for correction in motion
Path Planning: Simple backtracking
algorithm
To complete the above by the end of the semester
OUR TARGET
18.
New Approaches
New Approaches
AvoidCalibration by:
Self-Calibration
this was attempted by Amit Garg & Deepak
Verma, without much success.
Inner Camera Invariants
this will let us handle varying or unknown
internal parameters of the camera.
19.
References
References
Three DimensionalComputer Vision
O. Faugeras
The Geometry of Multiple Views
Andrew Zissermann
A Versatile Camera Calibration Technique
Roger Tsai (IEEE J. of Rob. & Aut., 1987)
Inner Camera Invariants & Applications
S. Banerjee et al.
![Camera Calibration
Camera Calibration
m = Ai [Ri|ti] M
A co-ordinate system for each camera
4+3+3 = 10 unknowns](https://image.slidesharecdn.com/midterm11-250513030727-931a60e7/85/mid_term1-1-ppt-Robot-Navigation-and-Mapping-4-320.jpg)
![Camera Calibration
Camera Calibration
m = Ai [Ri|ti] M
A co-ordinate system for each camera
4+3+3 = 10 unknowns](https://image.slidesharecdn.com/midterm11-250513030727-931a60e7/85/mid_term1-1-ppt-Robot-Navigation-and-Mapping-6-320.jpg)
![Right Image plane
Left Image plane
Essential & Fundamental Matrices
Essential & Fundamental Matrices
e’
e
x
x’
R,T
Y’
X’
Z’
C’
Right optical center
Base Line
X
Y
Z
C
Left optical center
X
World Point
• E = [T]XR
• X’T
EX = 0
• F = C’-T
EC-1
• x’T
Fx = 0
• l’ = Fx
l’](https://image.slidesharecdn.com/midterm11-250513030727-931a60e7/85/mid_term1-1-ppt-Robot-Navigation-and-Mapping-7-320.jpg)
![Right Image plane
Left Image plane
Essential & Fundamental Matrices
Essential & Fundamental Matrices
e’
e
x
x’
R,T
Y’
X’
Z’
C’
Right optical center
Base Line
X
Y
Z
C
Left optical center
X
World Point
• E = [T]XR
• X’T
EX = 0
• F = C’-T
EC-1
• x’T
Fx = 0
• l’ = Fx
l’](https://image.slidesharecdn.com/midterm11-250513030727-931a60e7/85/mid_term1-1-ppt-Robot-Navigation-and-Mapping-9-320.jpg)