Download to read offline
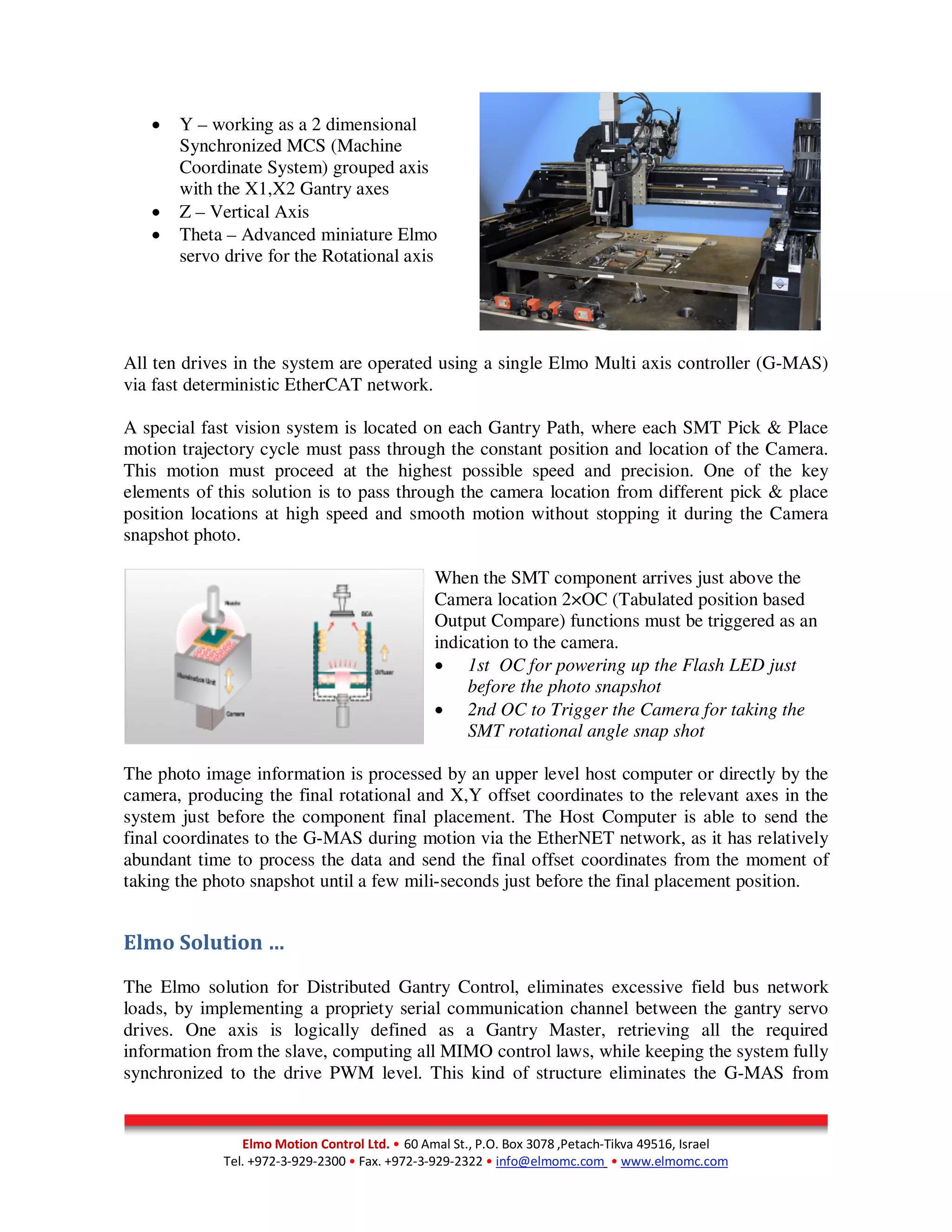
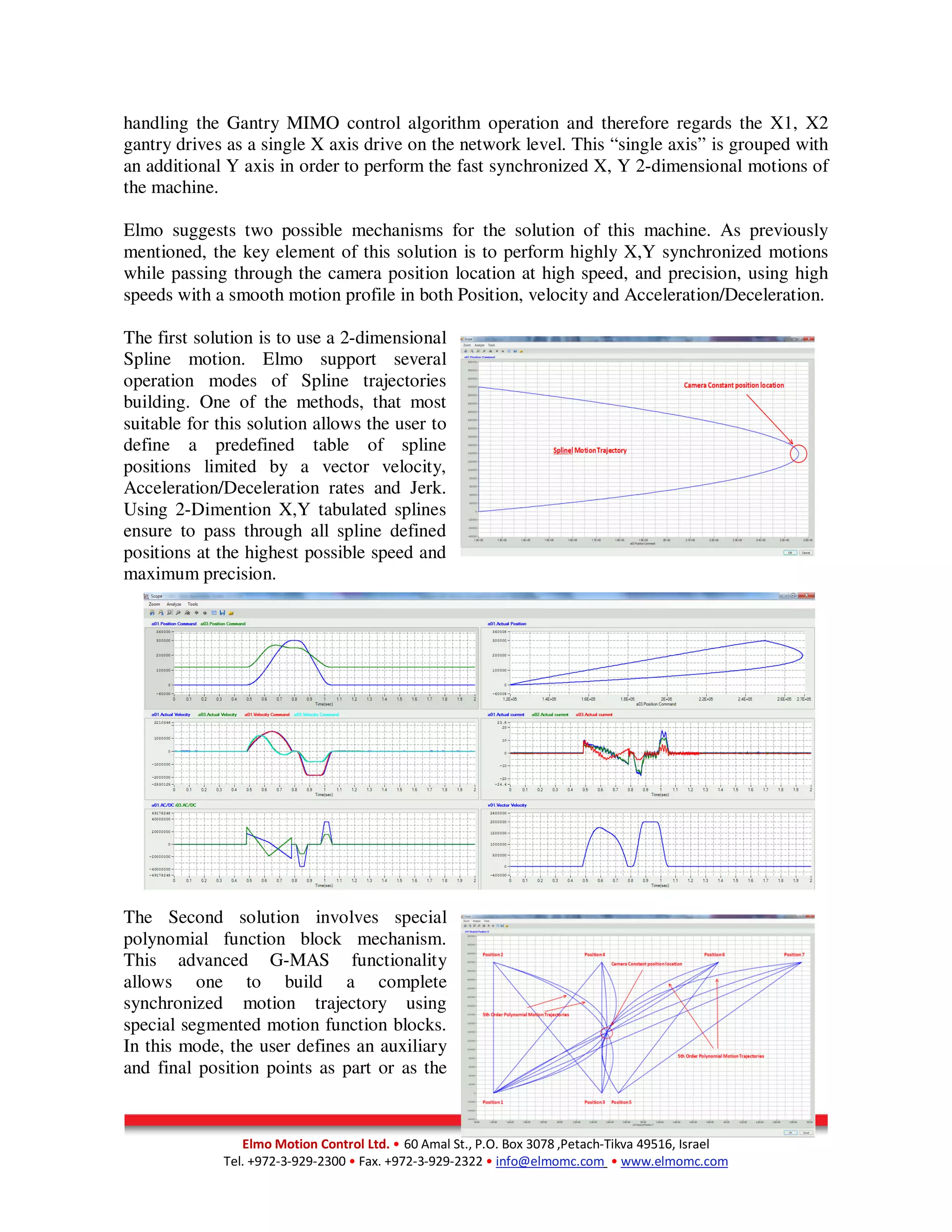
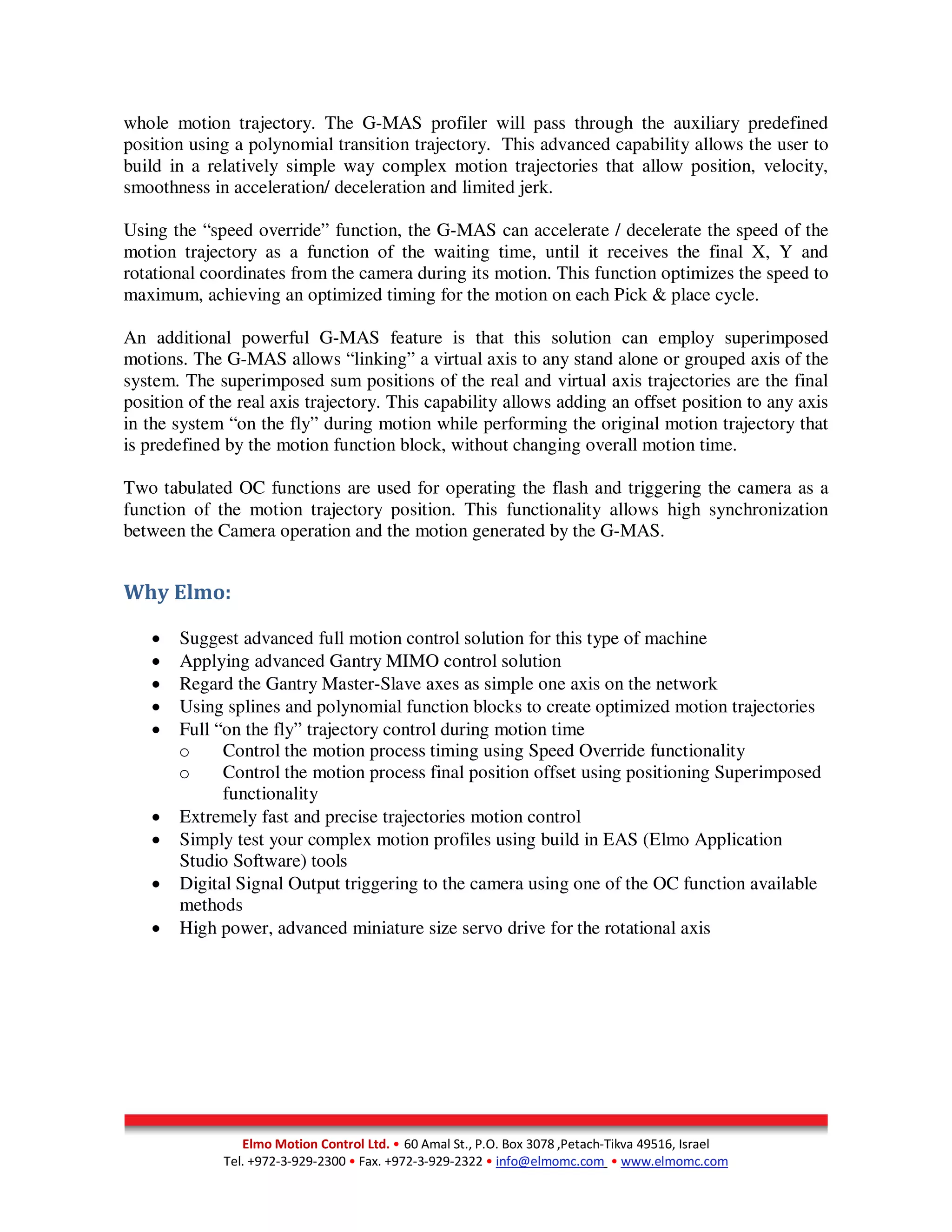

The document discusses Elmo's "Flying Vision" solution for precision pick and place machines that require position corrections during motion. Elmo suggests using splines or polynomial function blocks to create optimized motion trajectories that pass through a camera location at high speeds. The camera measures the component and sends corrected position coordinates to the controller during motion. Elmo's solution regulates motion timing and adds position offsets on the fly to smoothly implement the corrections without stopping. This allows the pick and place process to achieve precision and higher speeds than alternative solutions.


































































![Coded Agents – with UiPath SDK + LangGraph [Virtual Hands-on Workshop]](https://cdn.slidesharecdn.com/ss_thumbnails/codedagentsdeck-251215155422-5497c599-thumbnail.jpg?width=640&height=640&fit=bounds)














