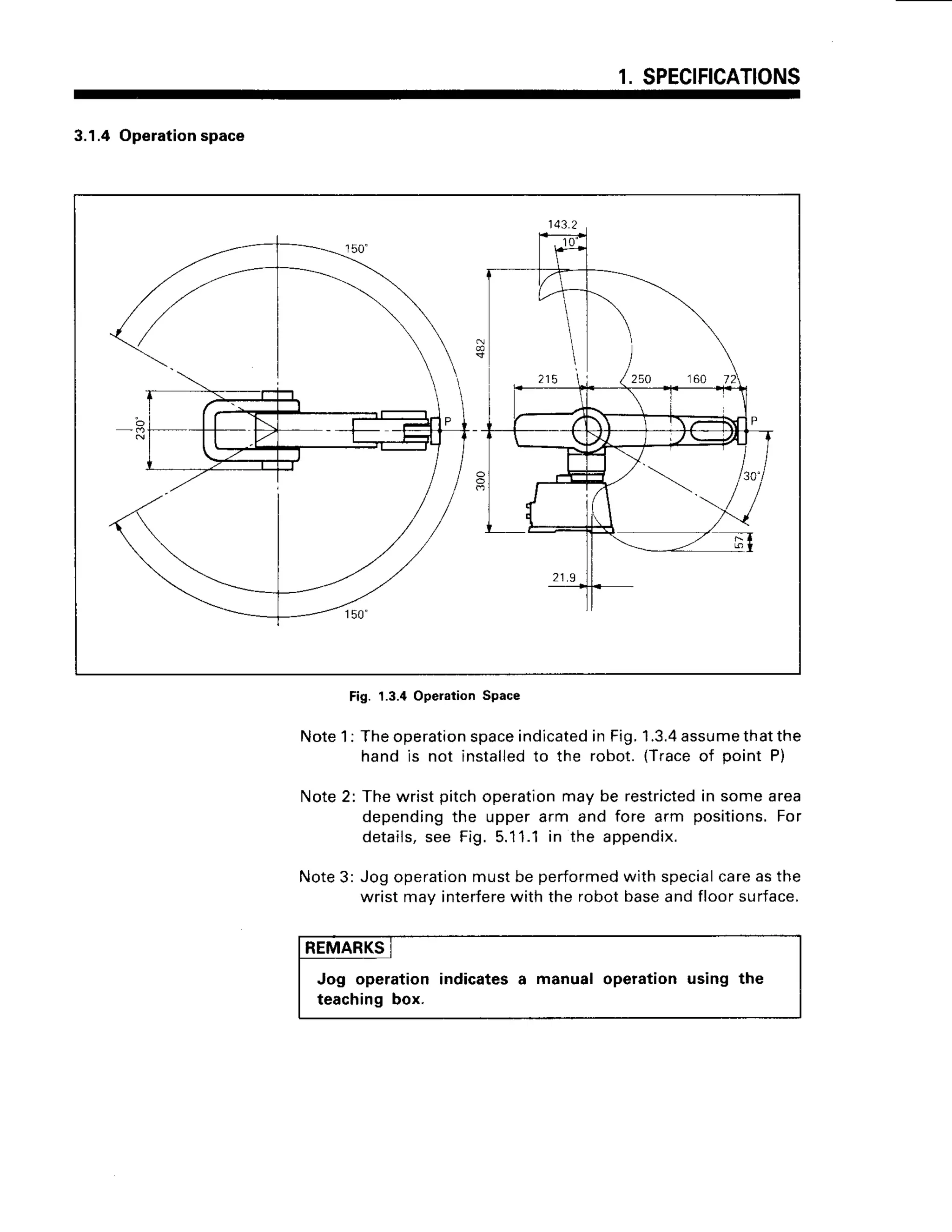
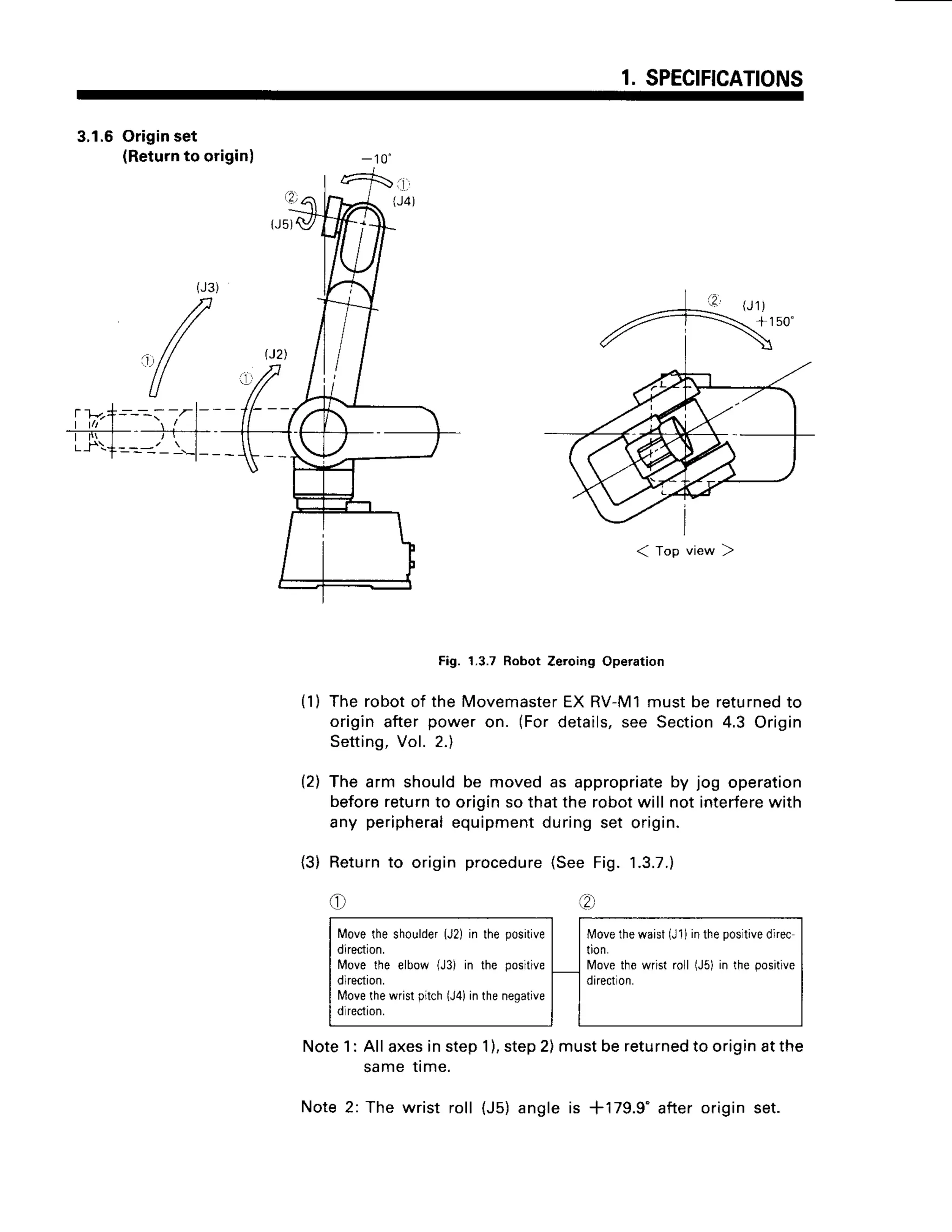
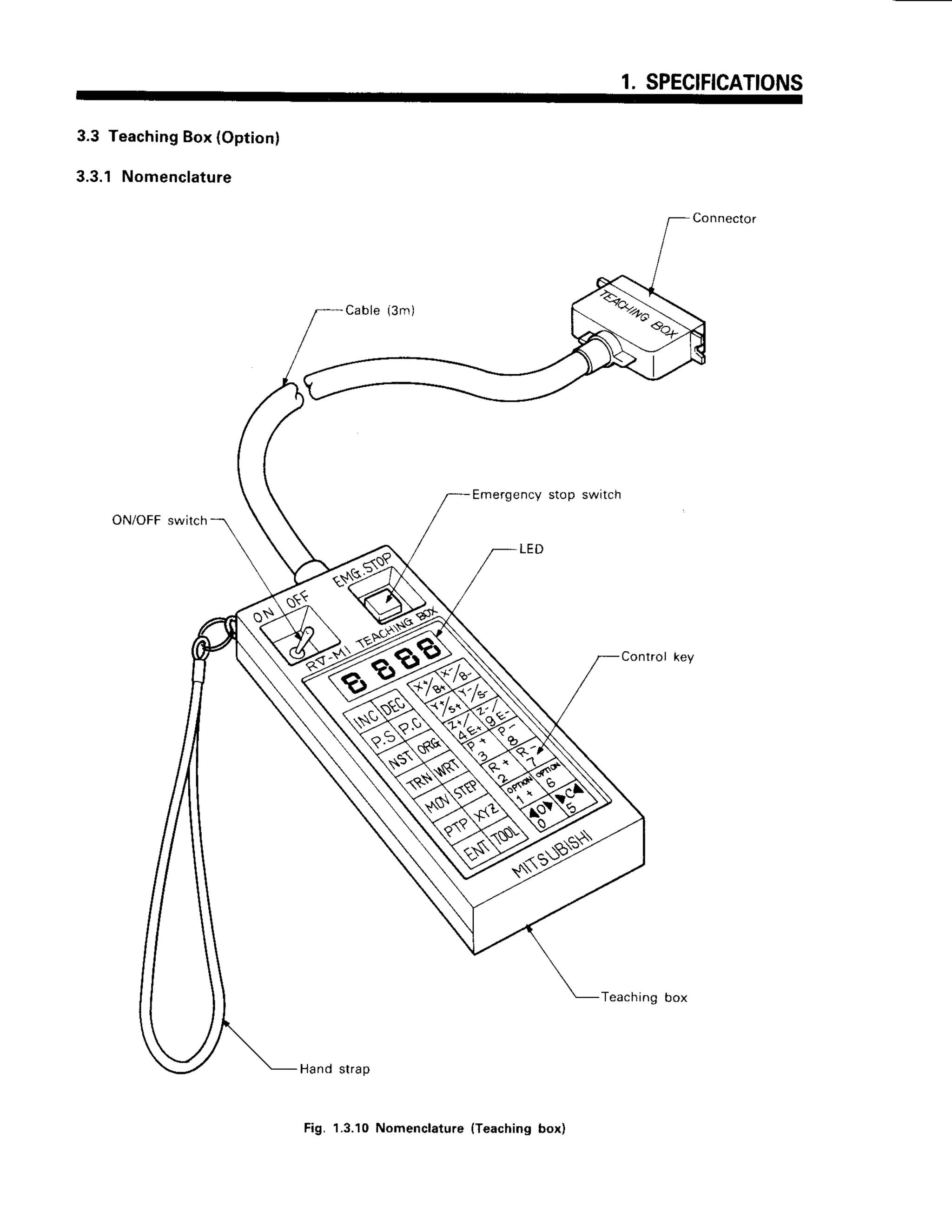
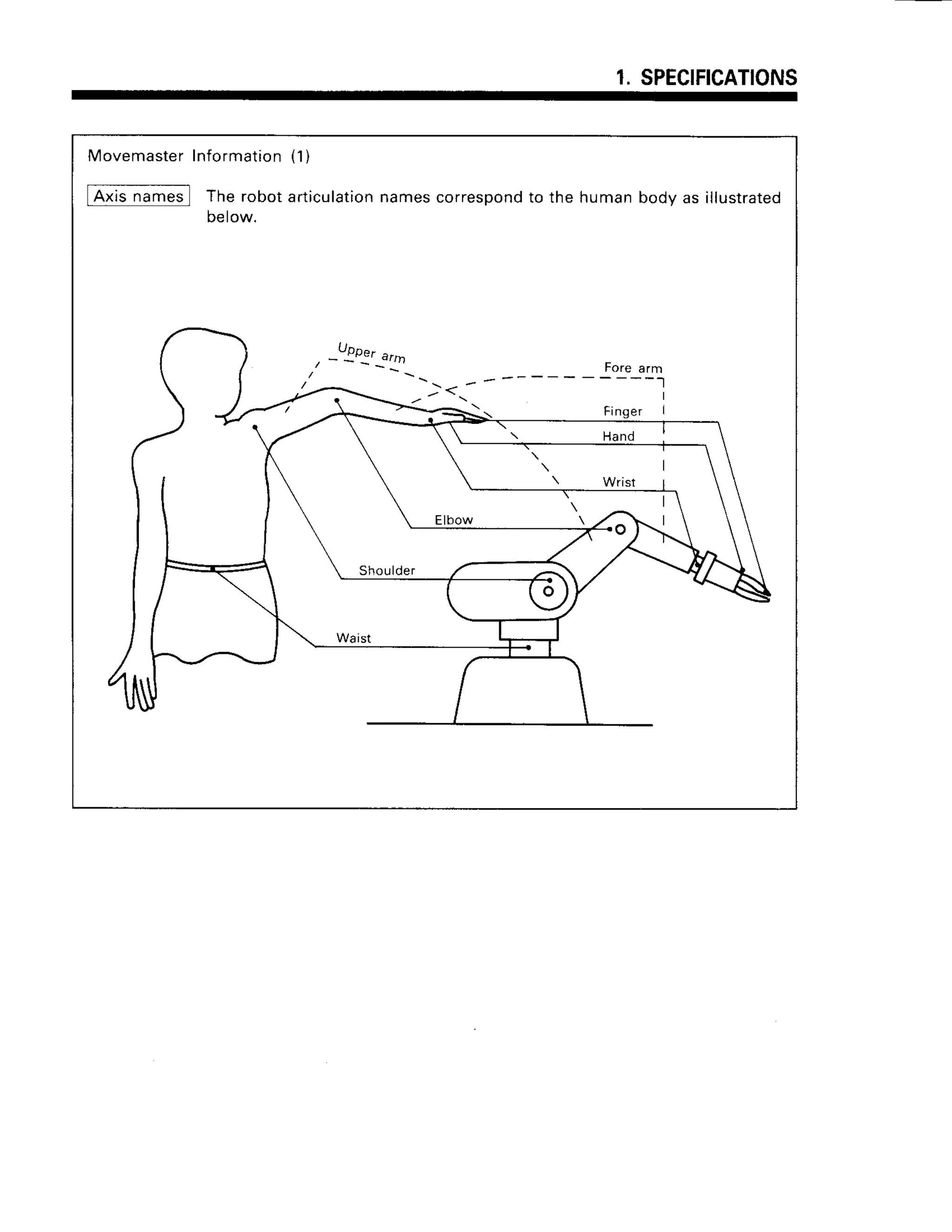
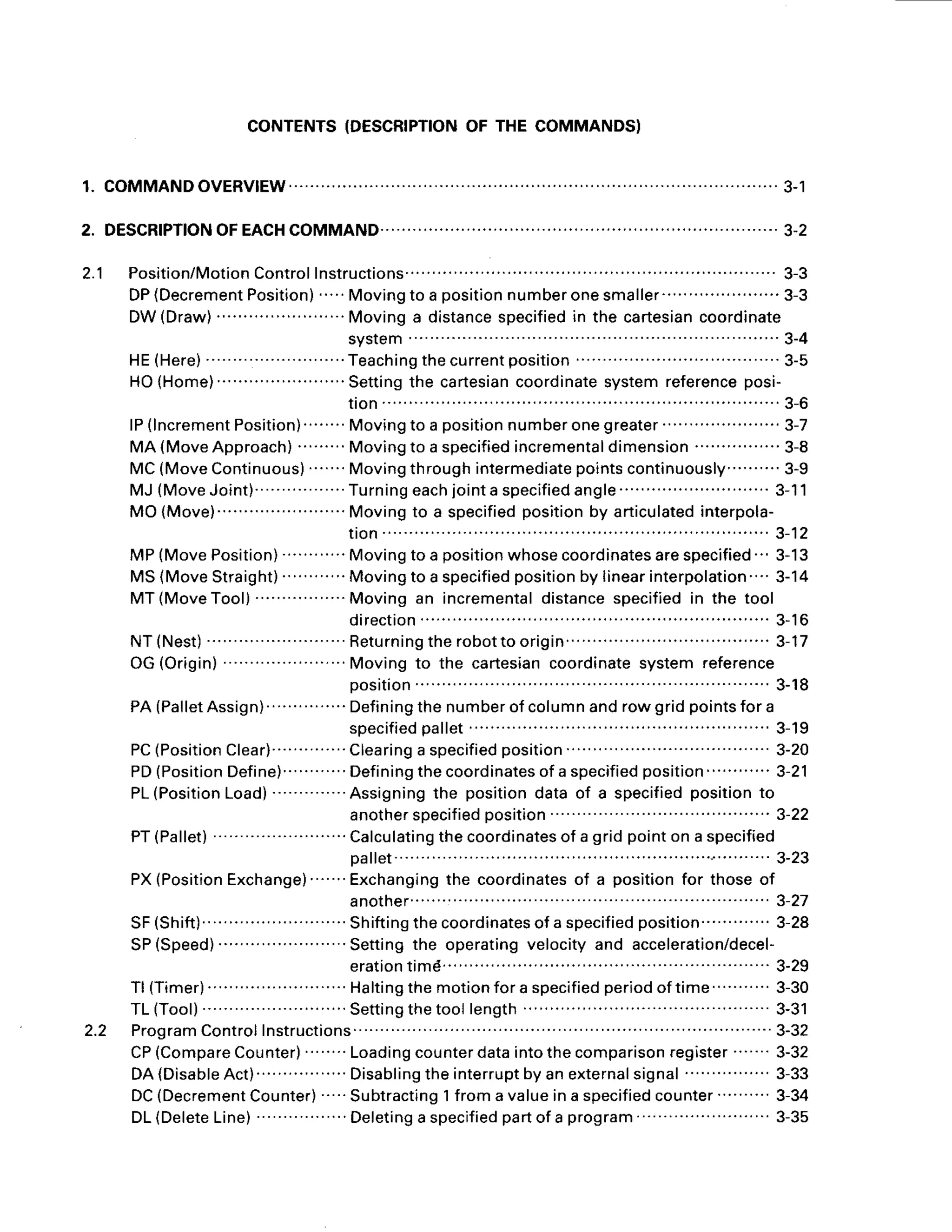
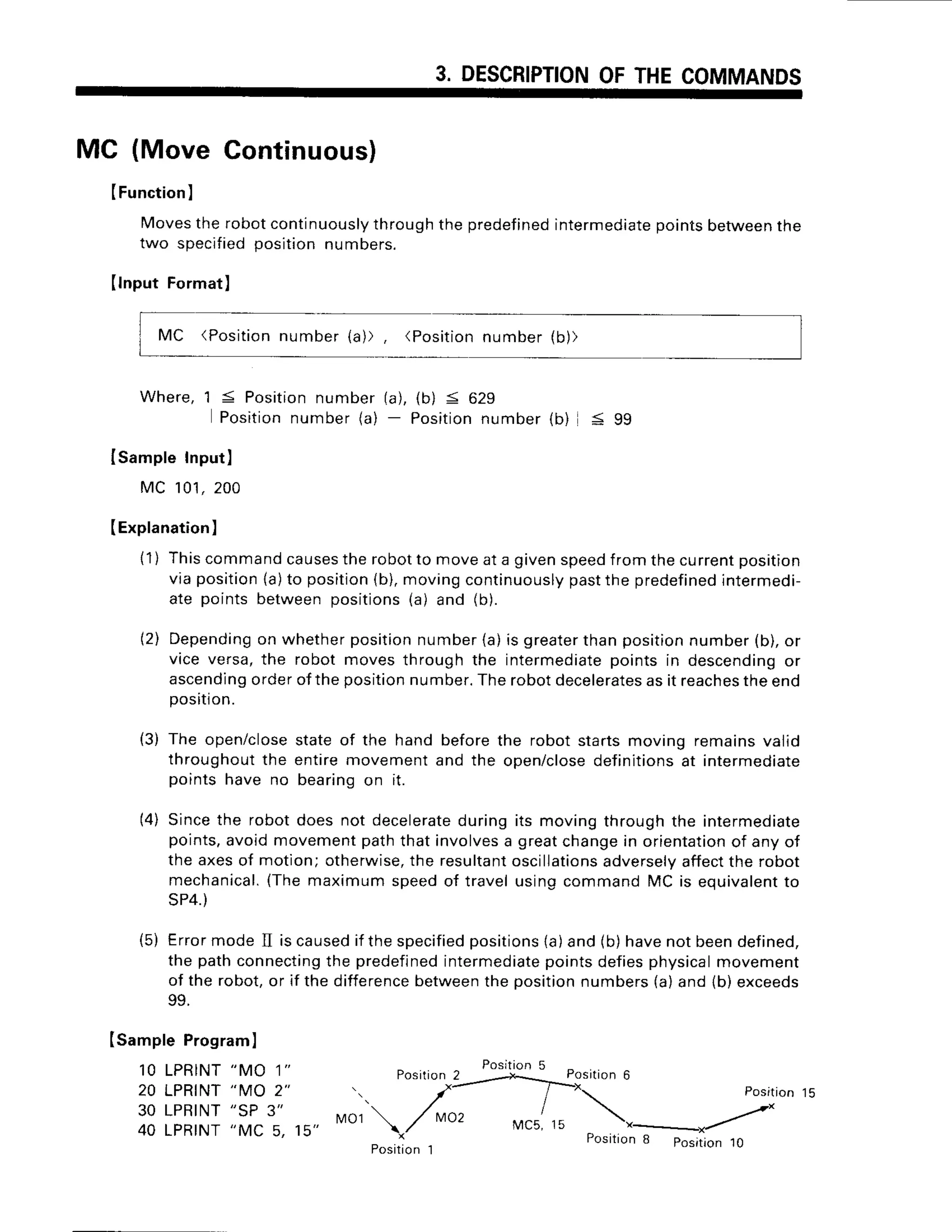
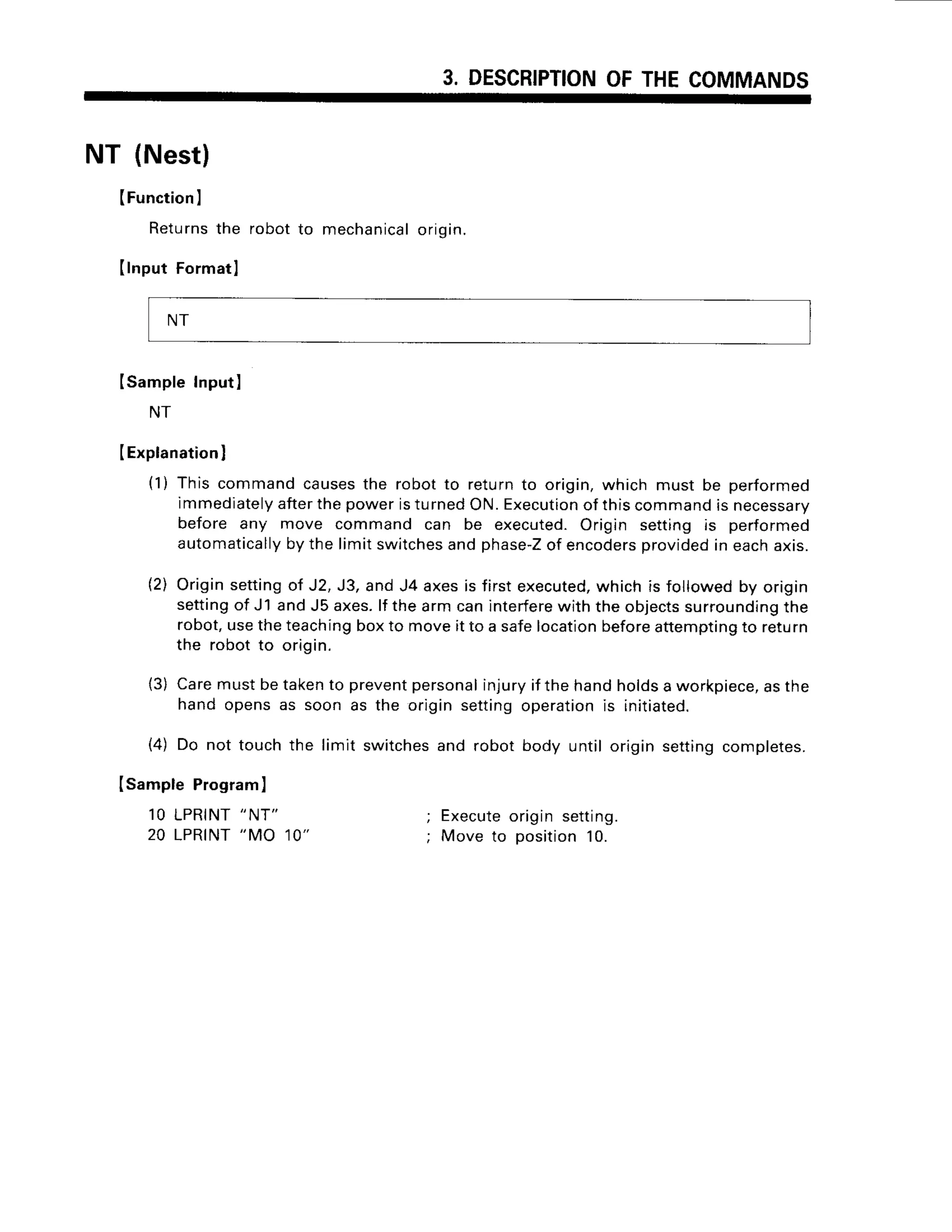
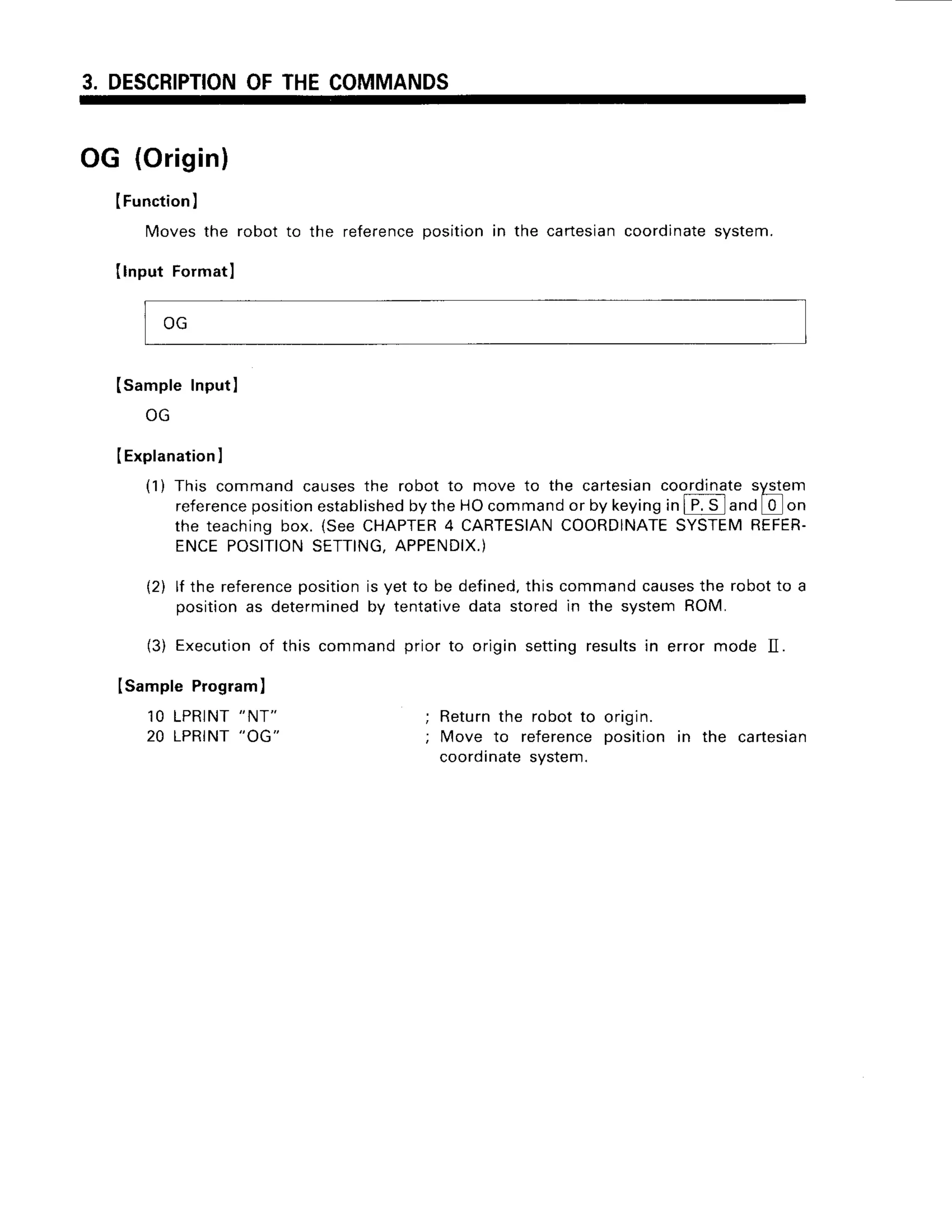
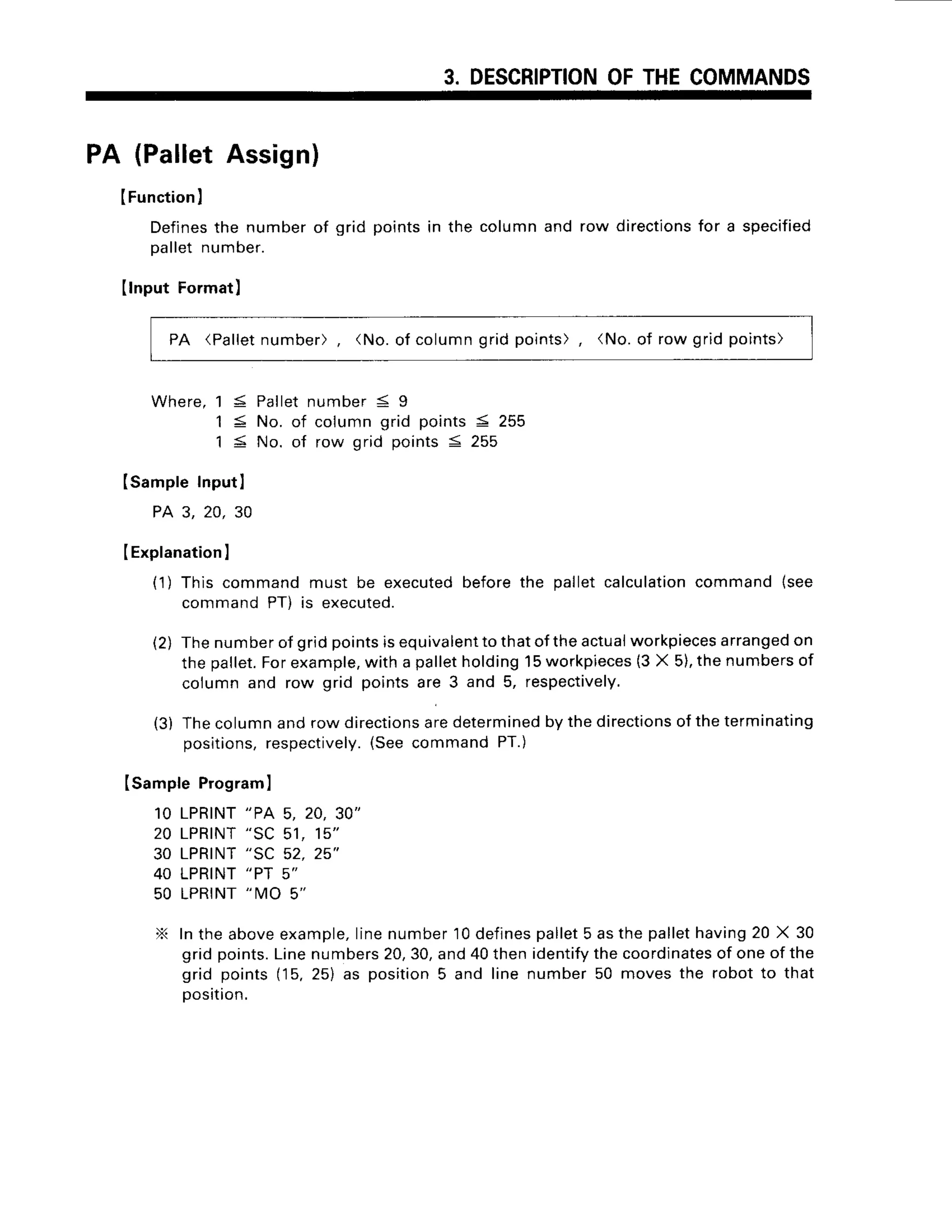
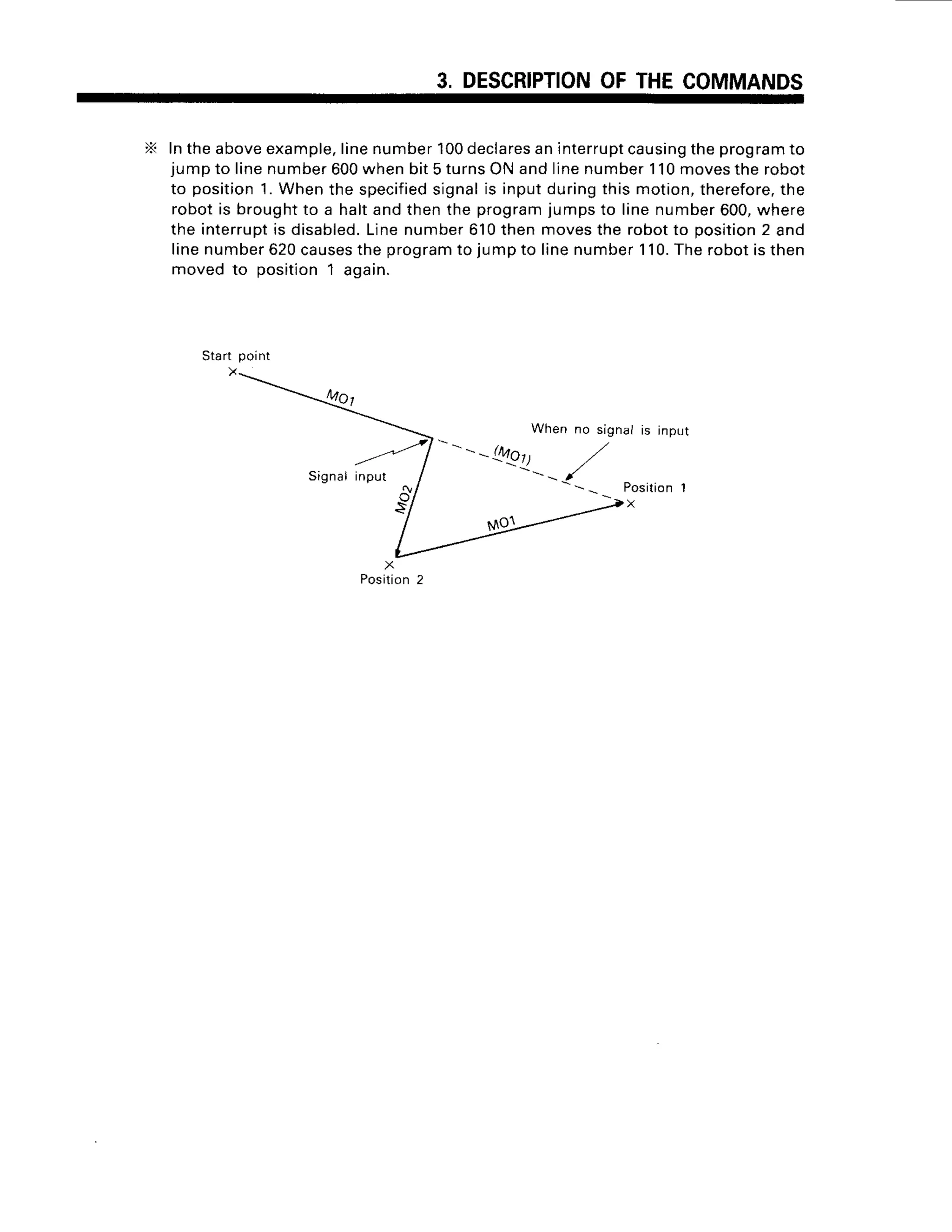
This document provides instructions for operating an industrial micro-robot system. It includes sections on specifications, installation, basic functions, programming procedures, position setting, executing programs, and descriptions of commands. Installation instructions cover transporting and setting up the robot, drive unit, optional equipment, and making electrical connections. Programming involves setting positions, generating and executing programs using intelligent commands described in the document.
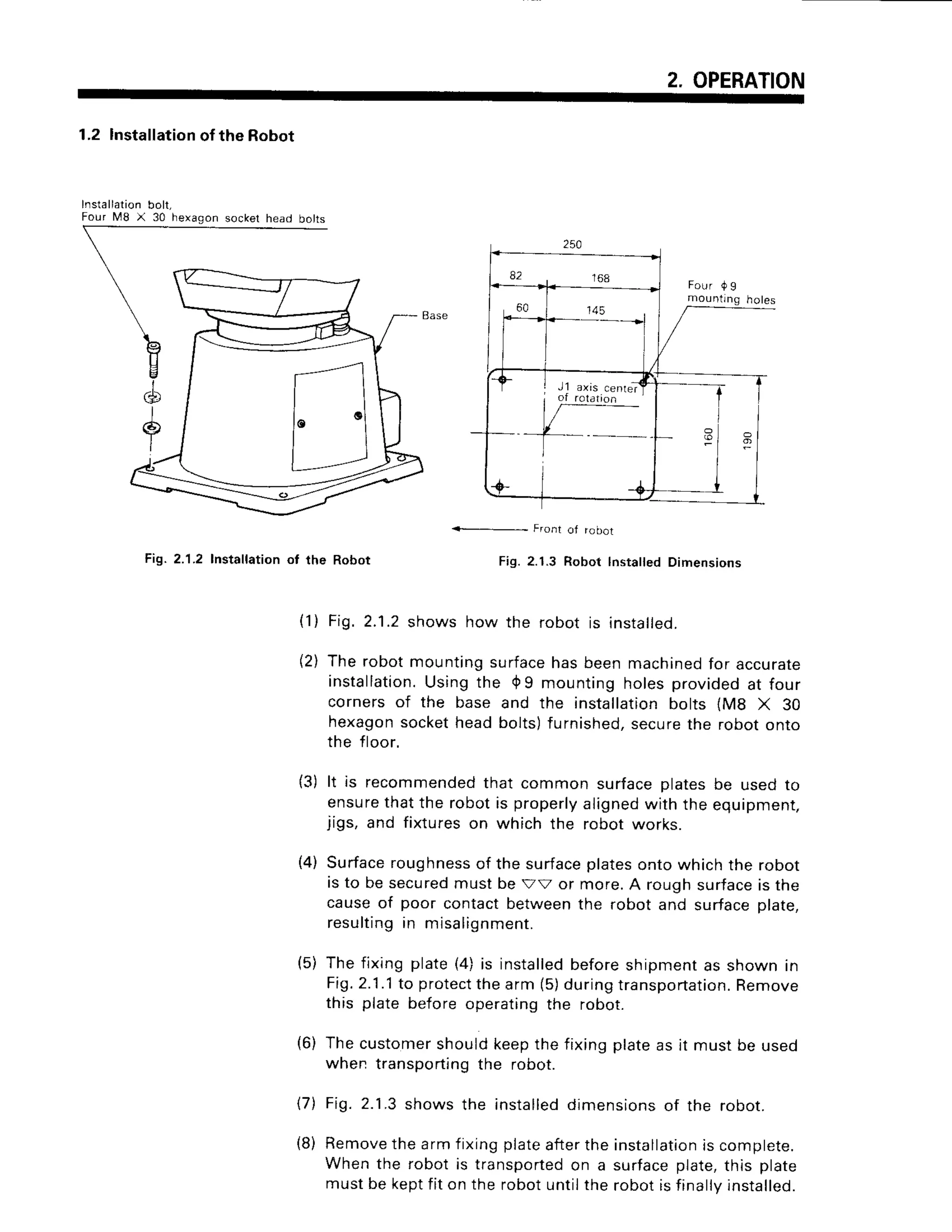
![1 .
iz] onennrom
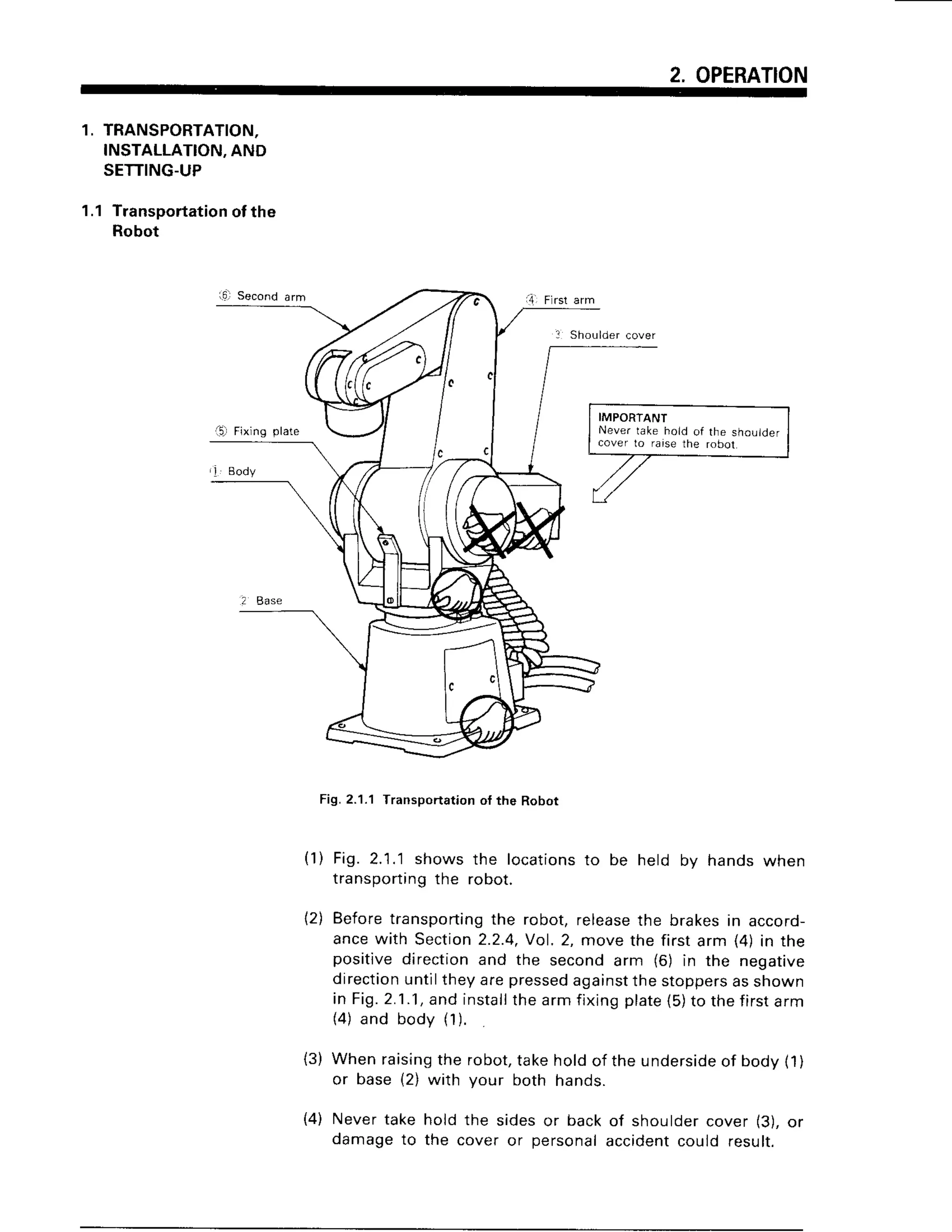
1.'l Transportation
of the Robot " " 2-1
1.2 lnstallation
of theRobot 2-3
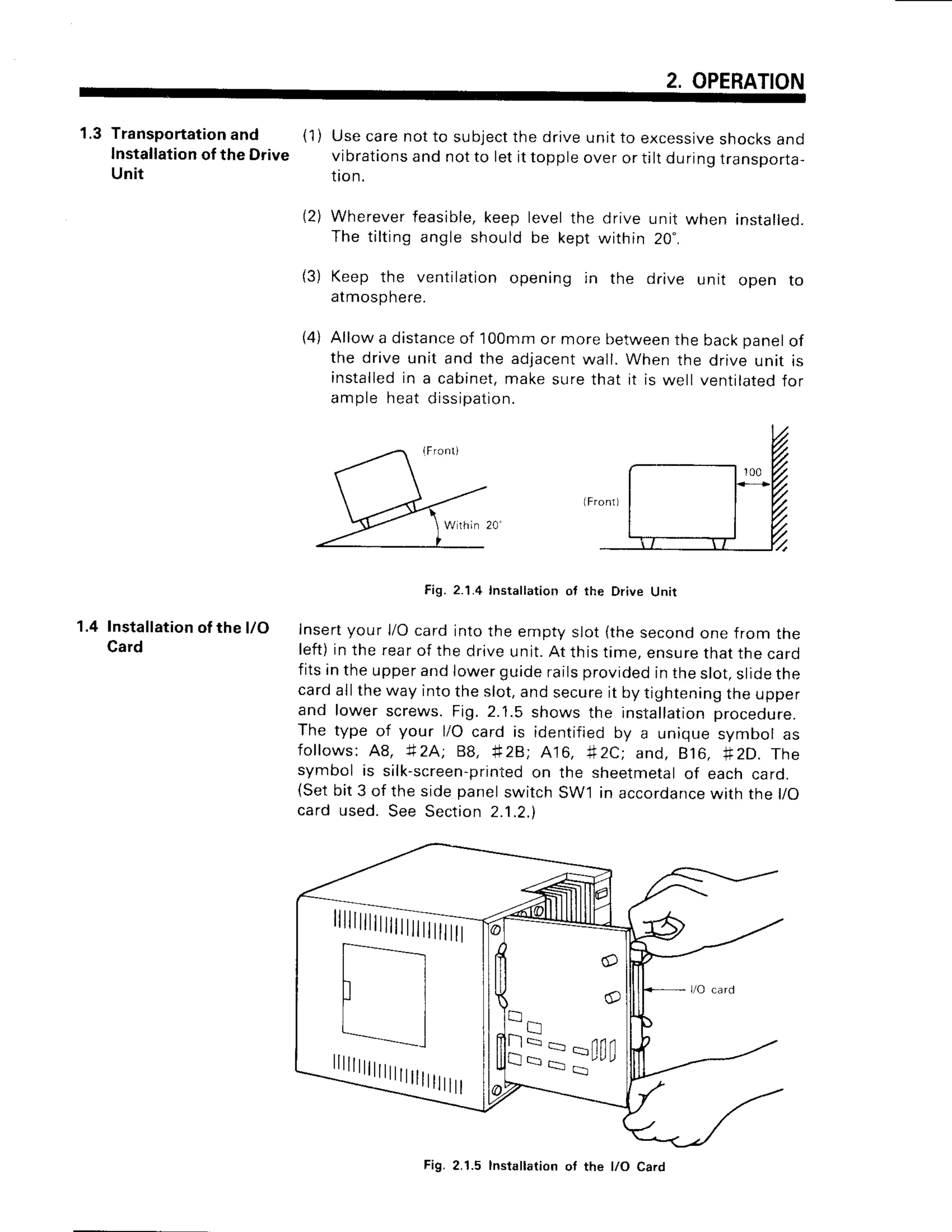
'l.3
Transportation
and Installation
of the DriveUnit. .. ........... . . . . 2-5
1 . 4 l n s t a l l a t i o n o f
t h el / OC a r d . . . . . . . . . . . . . . . . . . . '
. . . . . . 2 - 5
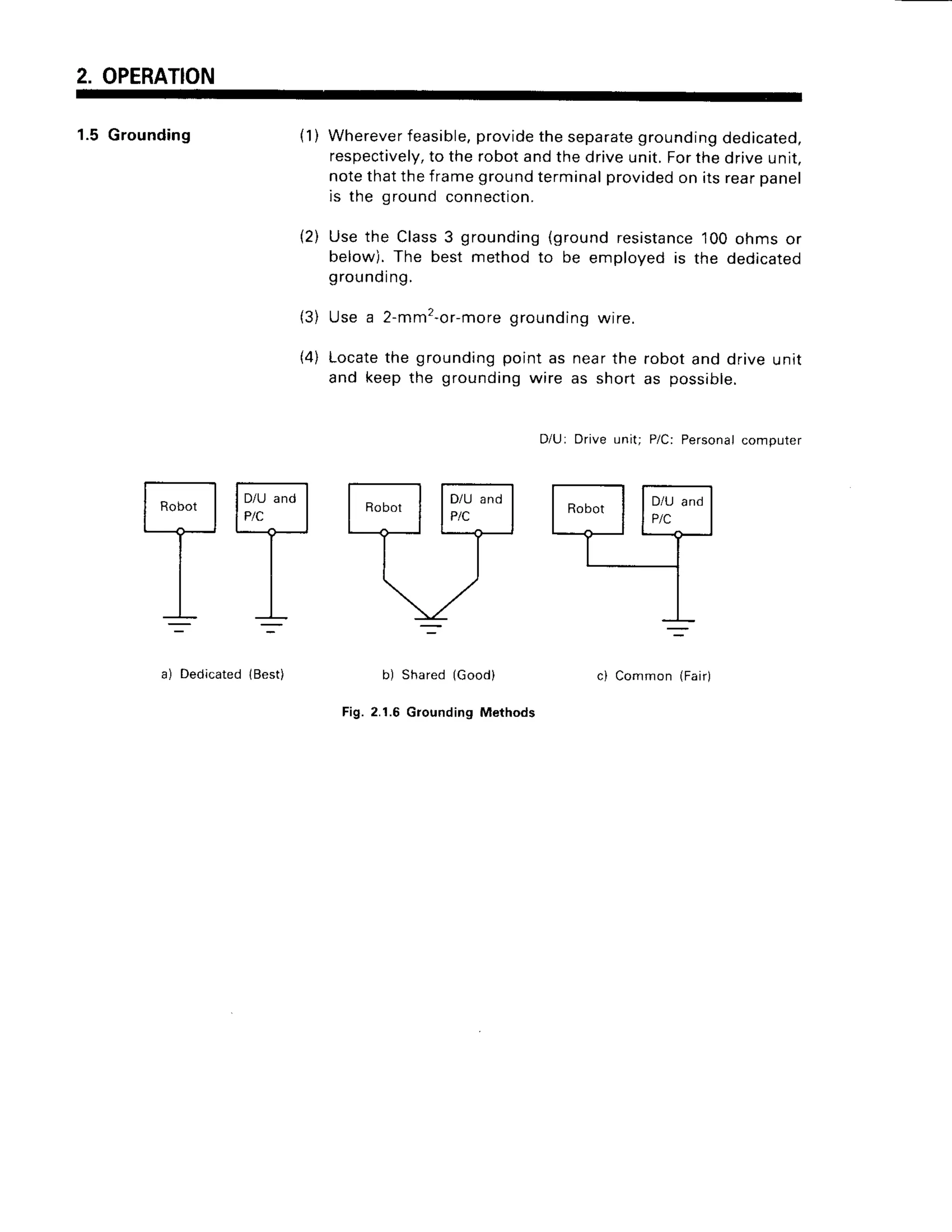
1.5 Grounding 2-6
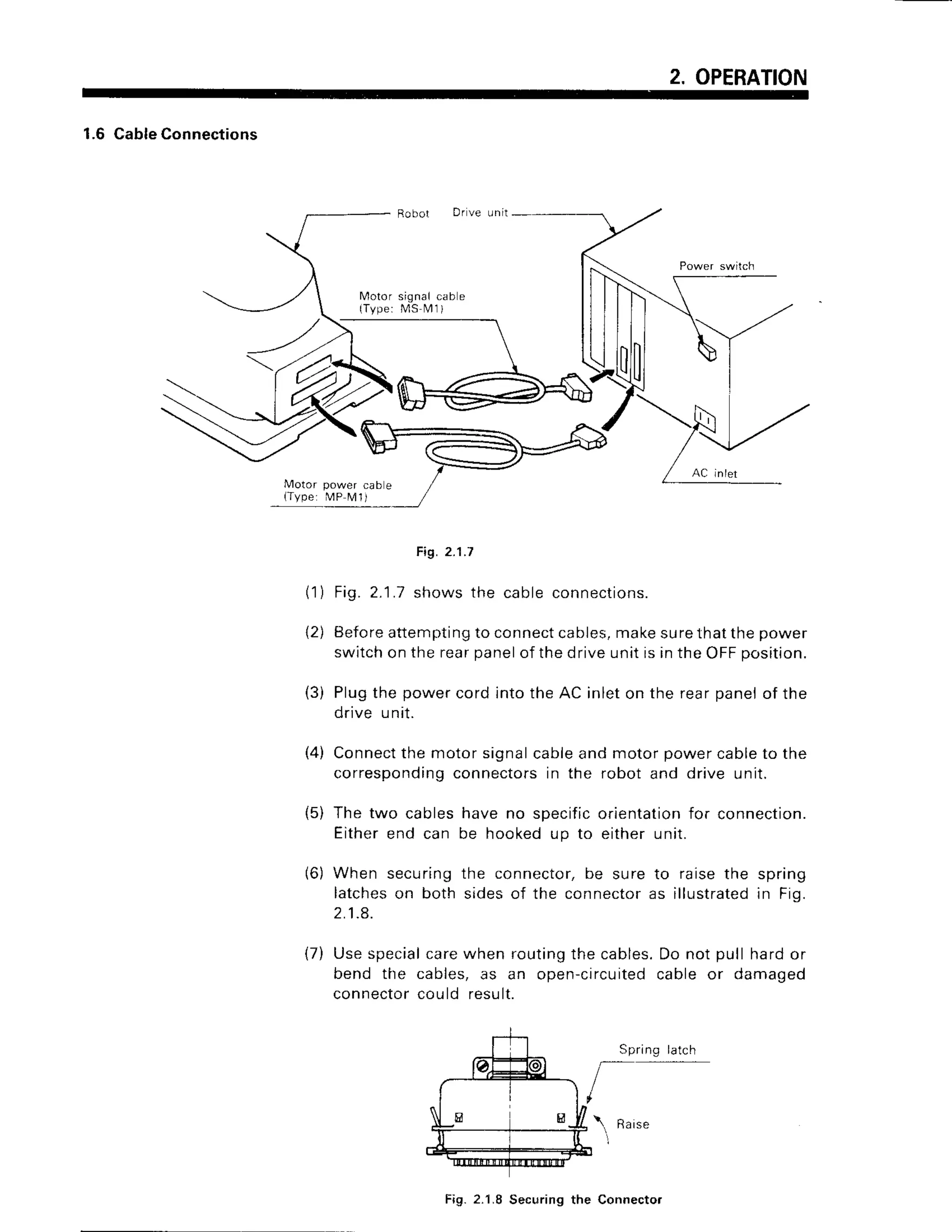
1.6 CableConnections 2-7
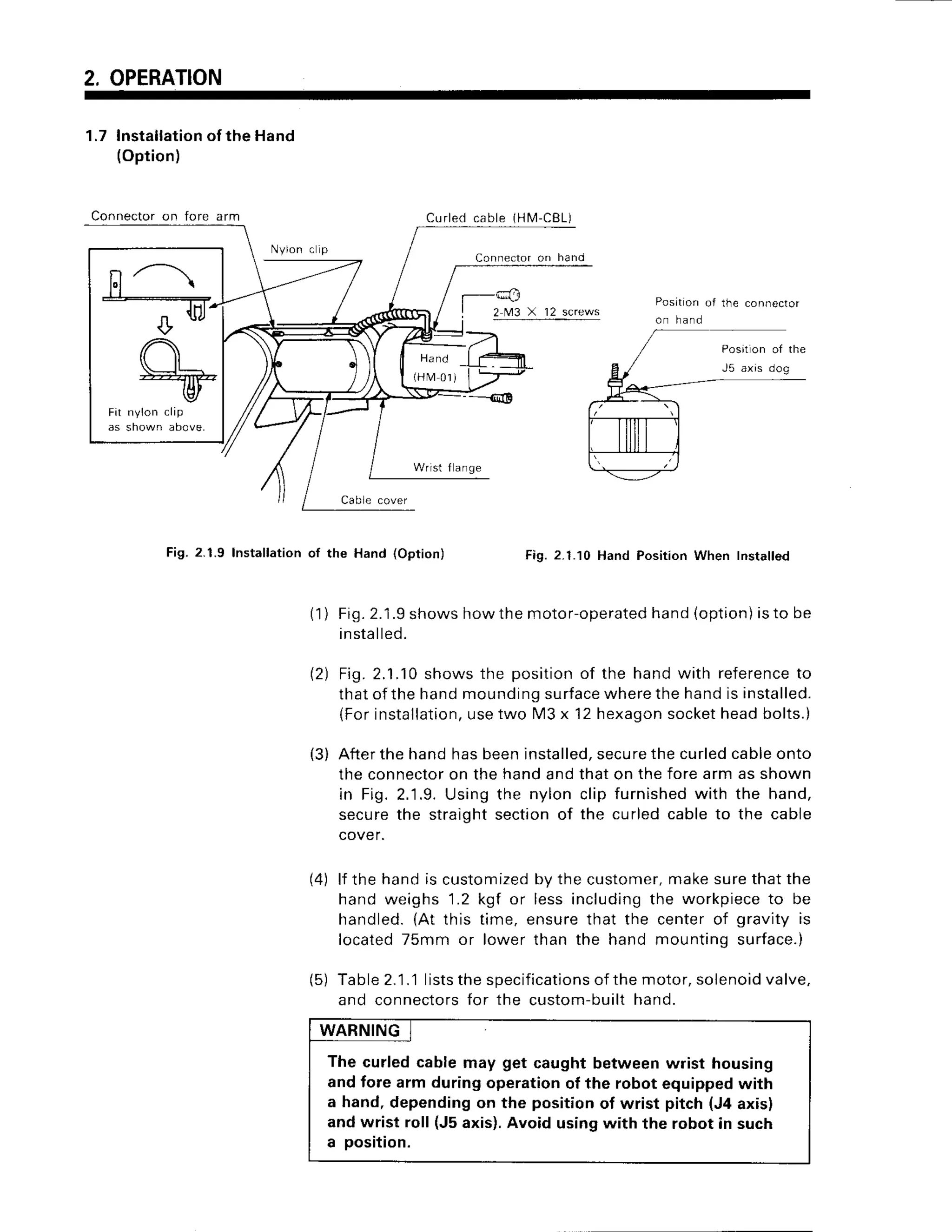
1 . 7 l n s t a l l a t i o n
o f t h eH a n d( O p t i o n ) .
. . . . . . . . . . . . . . . . . . 2 - 8
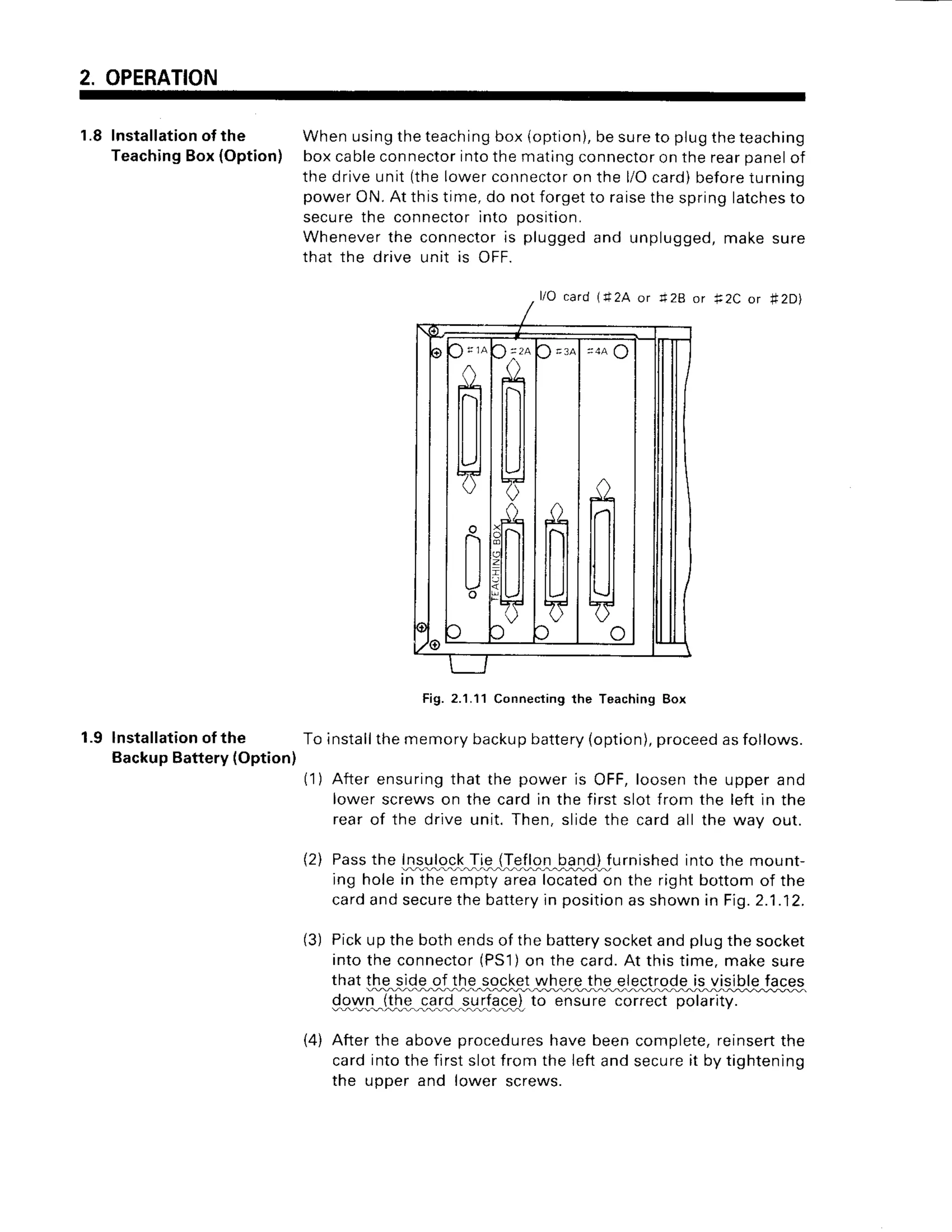
'1.8
Installation
of theTeaching
8ox (Option) " " " '2-10
1.9 lnstallation
of the Backup
Battery
{Option) .. .. .. . . 2-10
1.10 instailatron
of the Emergency
StopSwitch " '2-11
D r i v e
Un i t . . . . . . . . ' . ' .
2 - 1 2
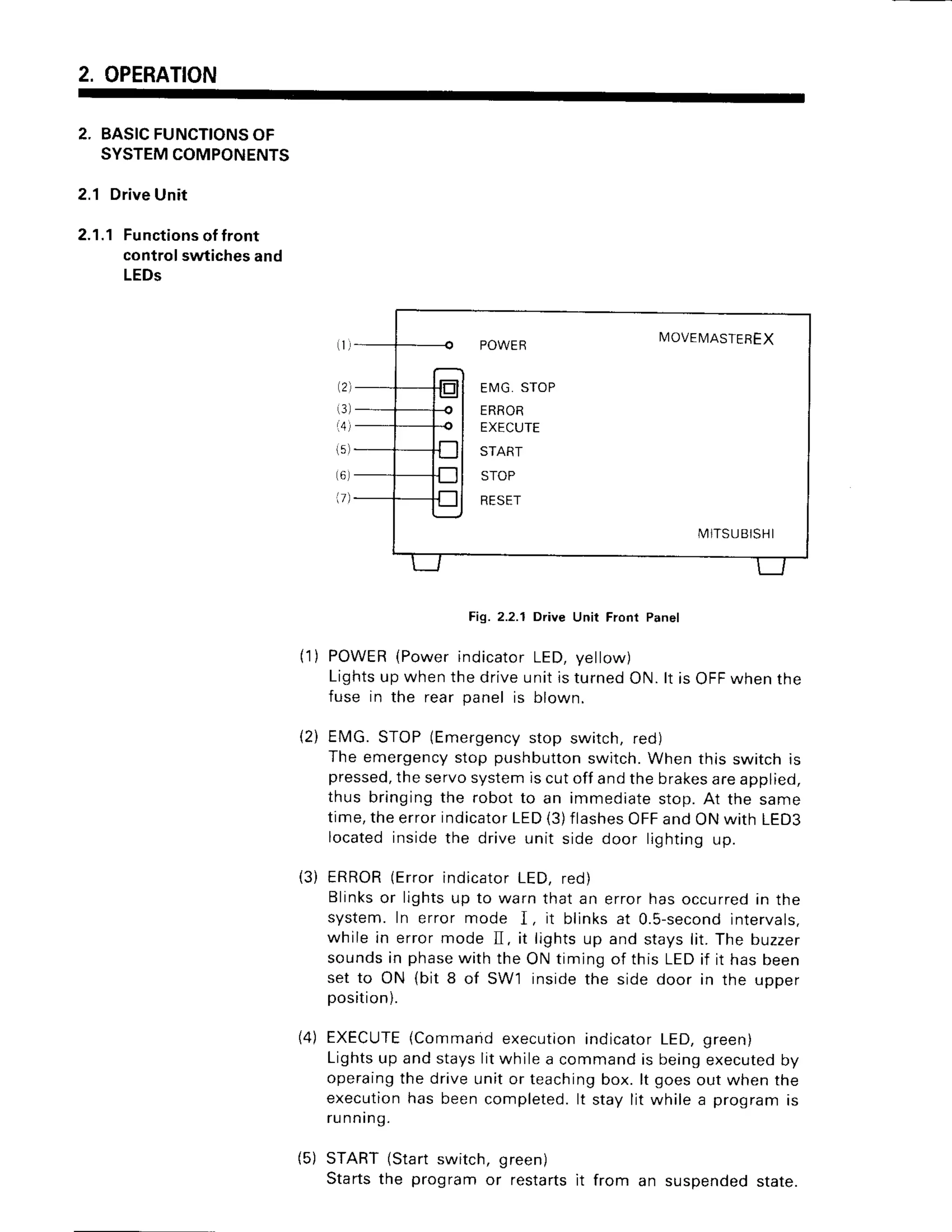
2.1.1 Functionsoffrontcontrol
switches
and LEDs" ' " " "'2-12
2.1.2 Functionsof sidesettingswitchesand LEDs " " " ' 2-13
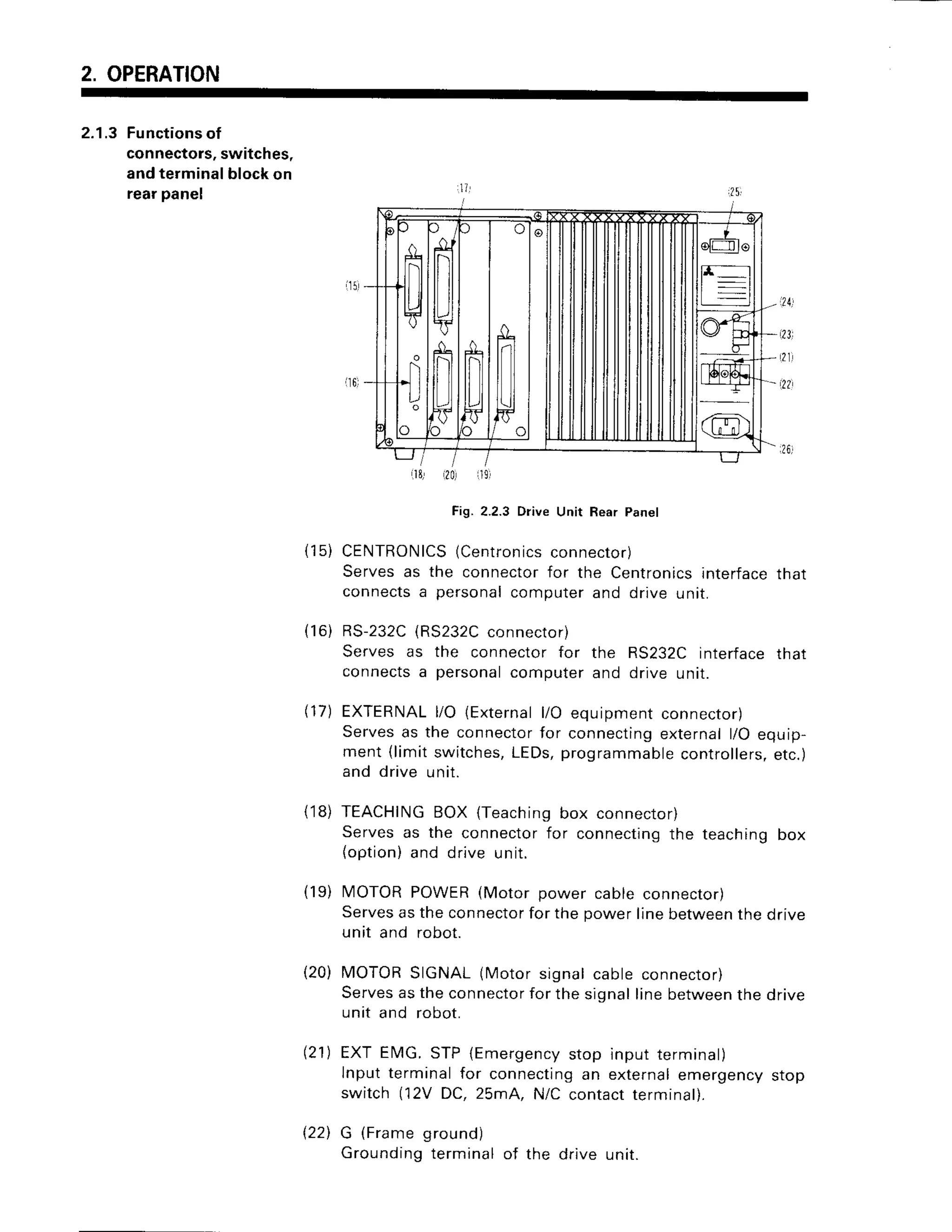
2.1.3 Functionsof connectors,
switches,and terminalblockon rearpanel " " """ 2-16
T e a c h i n g
B o x " . " " " " 2 - 1 8
2 . 2 . 1 F u n c t i o n s o f
t h es w i t c h e s " " " " " " " " 2 - 1 8
2 , 2 . 2 F u n c t i o n s o f e a c h k e y " " " " " " " " 2 - 1 8
2.2.3 Functionsofthe
indicator
LED " "" " " "" " "" '2-21
2.2.4 Eeleasing
the brakes ' ' '' '' '' '' ''''''2-22
2.2.5 lrrreliigent
commandscorresponding
to eachkey" " " """"" 2-22
SystemContigu
ration "" 2-23
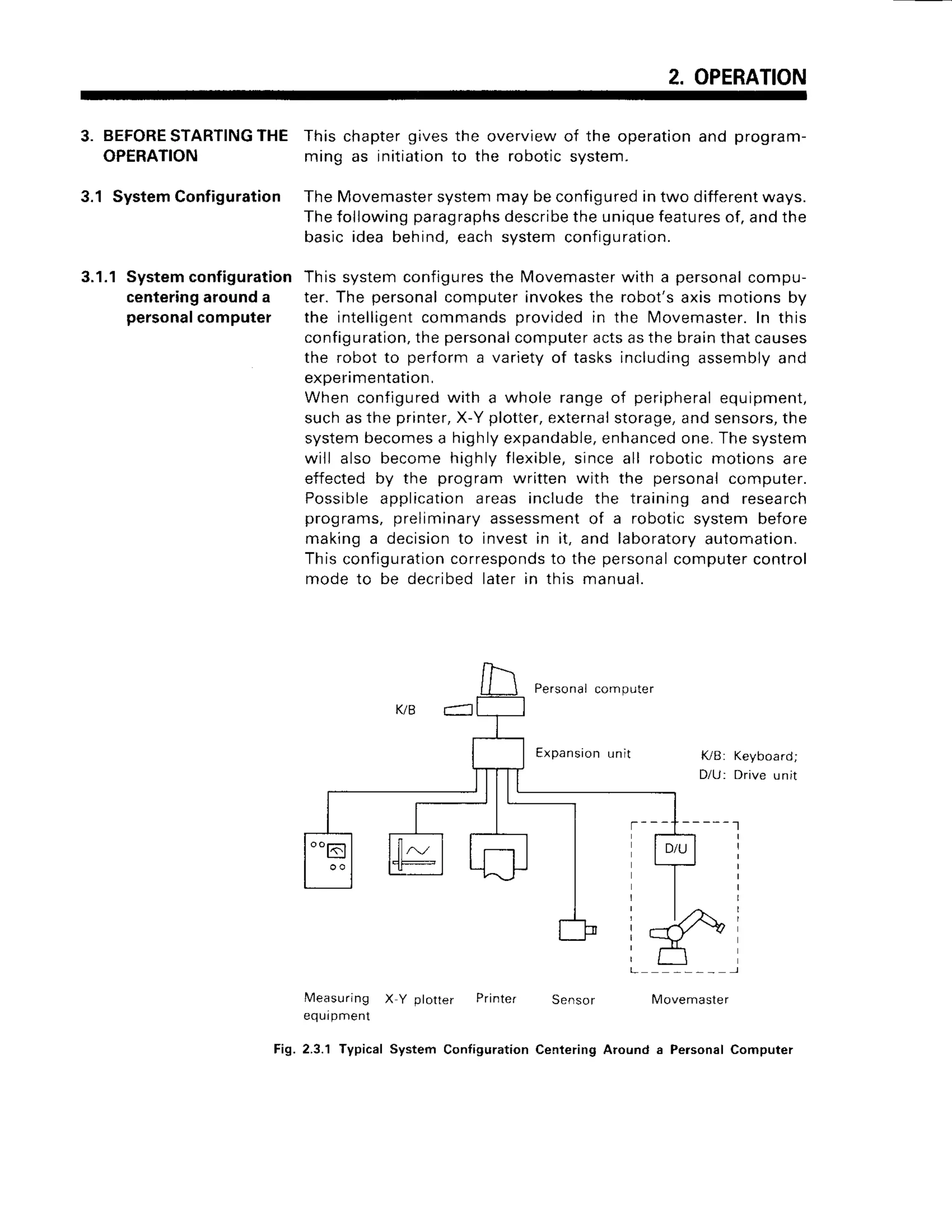
3.1.1 Systemconfiguration
centering
arounda personal
computer" "" """""'2-23
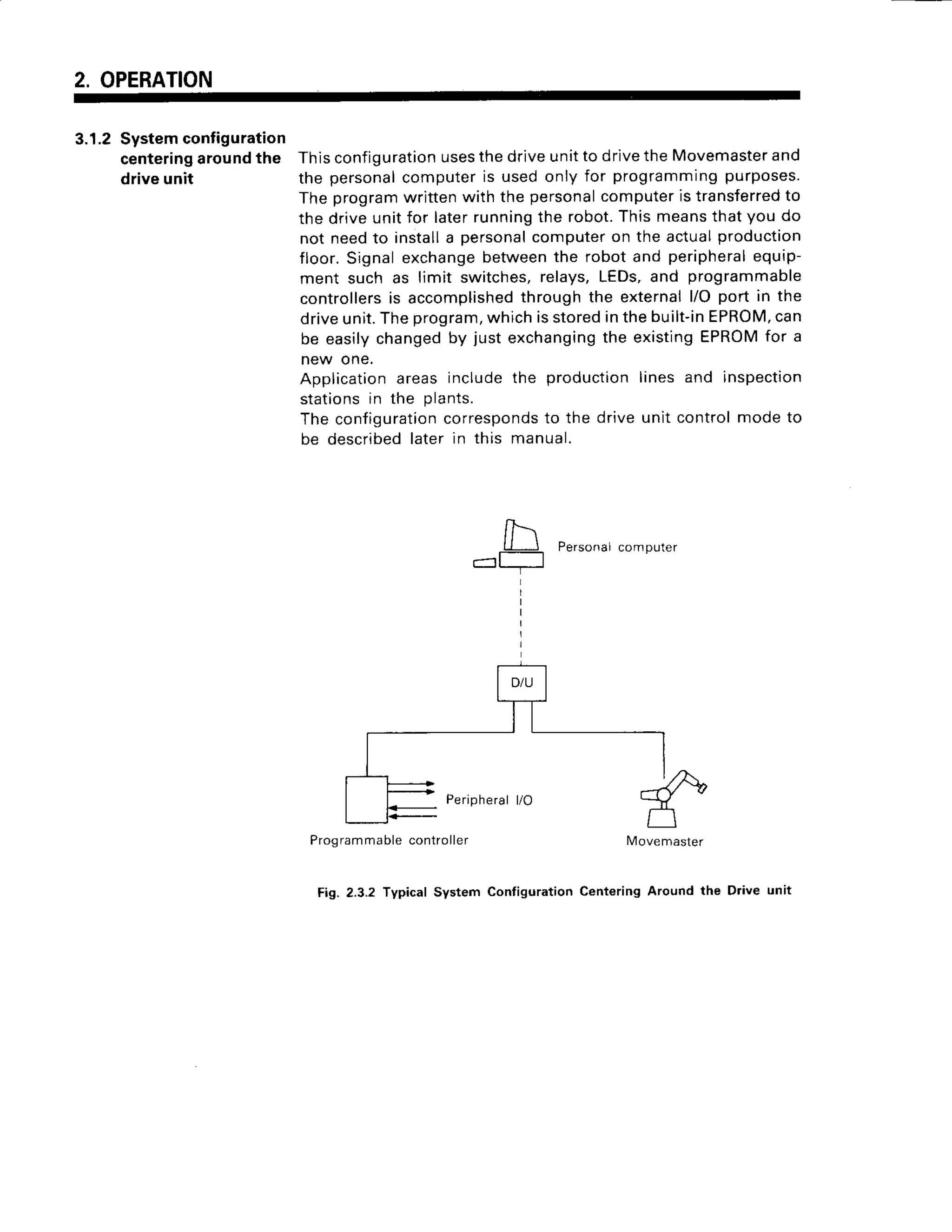
3.1.2 Systemconfiguration
centering
aroundthe driveunit " "" "" " """ "" " '2-24
Robot-Computer
Link 2-25
3.2.1 Cerrt
ronicsinterface 2-25
3.2.2 RS232C
interface " "'2-25
ControlModes " """ "" " " "" 2-26
3 . 3 . 1 P e r s o n a l c o m p u t e r
r h o d e" ' ' ' 2 - 2 6
3.3.2 Driveunitmode ' ' '2-24
4 . 1 S e t t i n g
t h eS i d e
S e t t i n g
S w i t c h e s " ' ' ' ' ' 2 - 2 9
4.2 Turning
Power
ON 2-29
4.3 Origin
Setting """'2-29
2.2
J . l
3.2
3.3](https://image.slidesharecdn.com/movemasterrobot-210420203455/75/Movemaster-robot-4-2048.jpg)

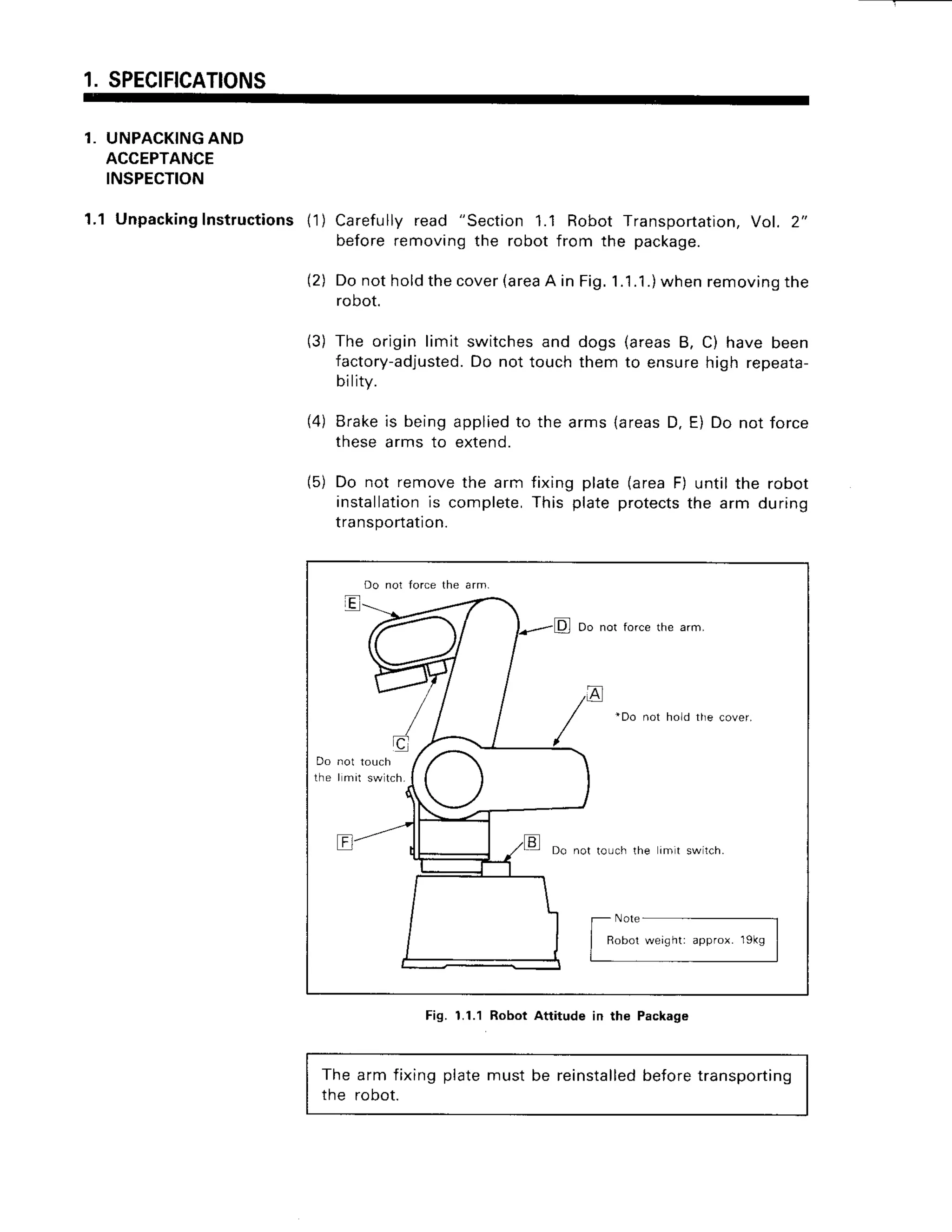

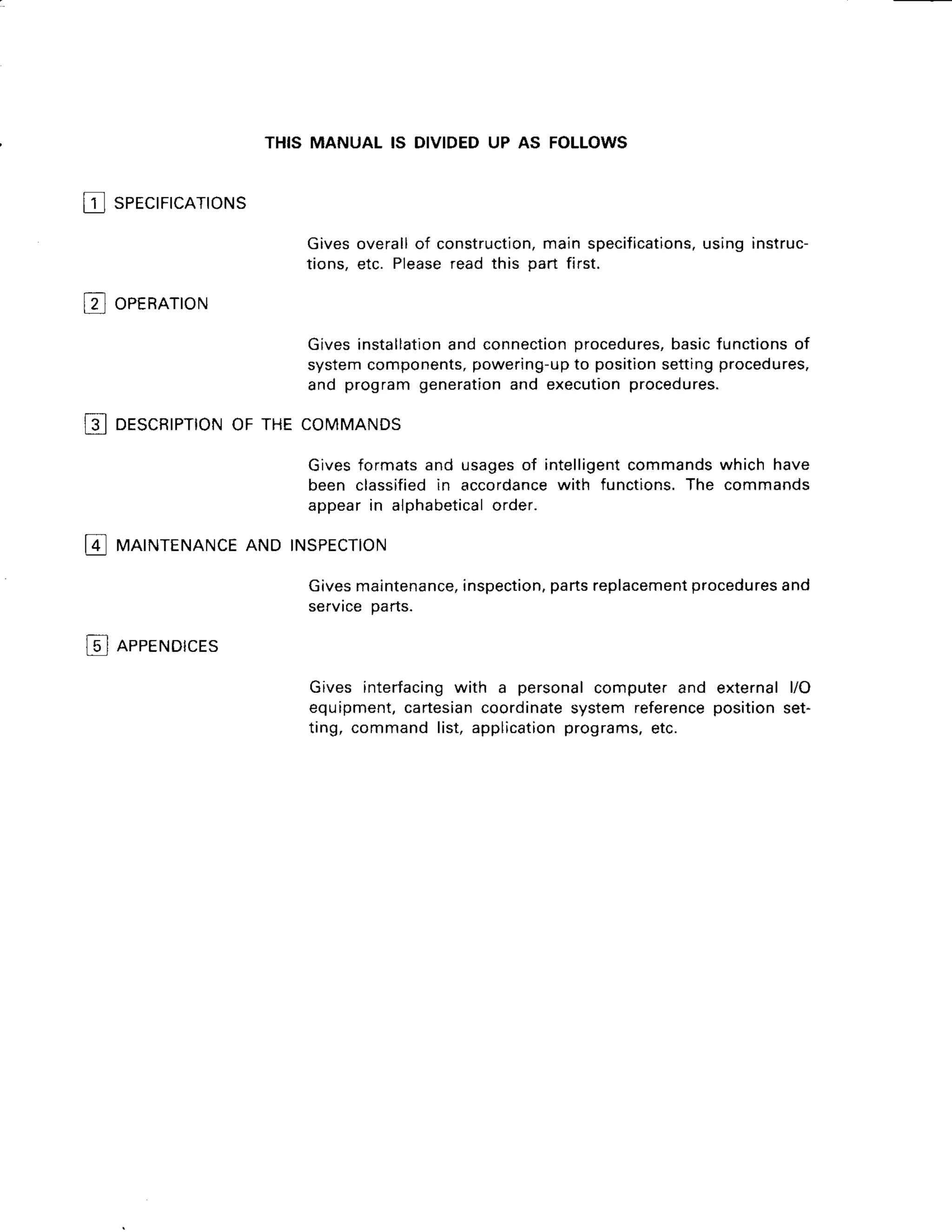
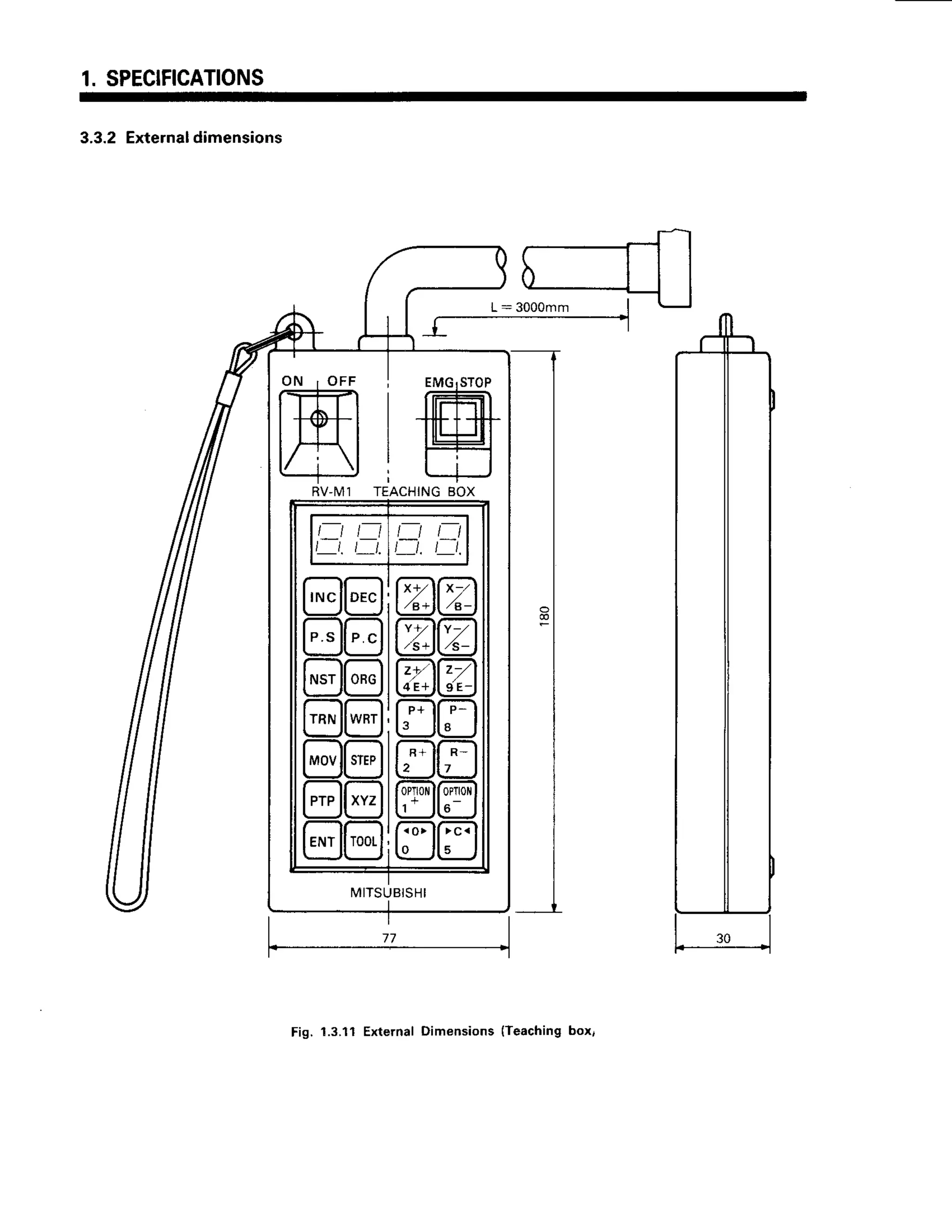
![1. SPECIFICATIONS
2. SYSTEMOF
CONSTRUCTION
2.1 Overallof Construction
Motor power cable
( M P M ] ) 5 m computercable*
Motor signalcable
( M SM l ) 5 m
Drive unit
I D / UM 1 )
Robot
( R V , M 1 )
(POWM1
OPersonalcomputer
(MUtTtl6lll)
Teaching
box'
(T/BMl)
Cablelength3m
+ indicales an option.
OThe equipment indicated by should be prepared by the customer.
Fig. 1.2.1Ovelallof Construction](https://image.slidesharecdn.com/movemasterrobot-210420203455/75/Movemaster-robot-15-2048.jpg)

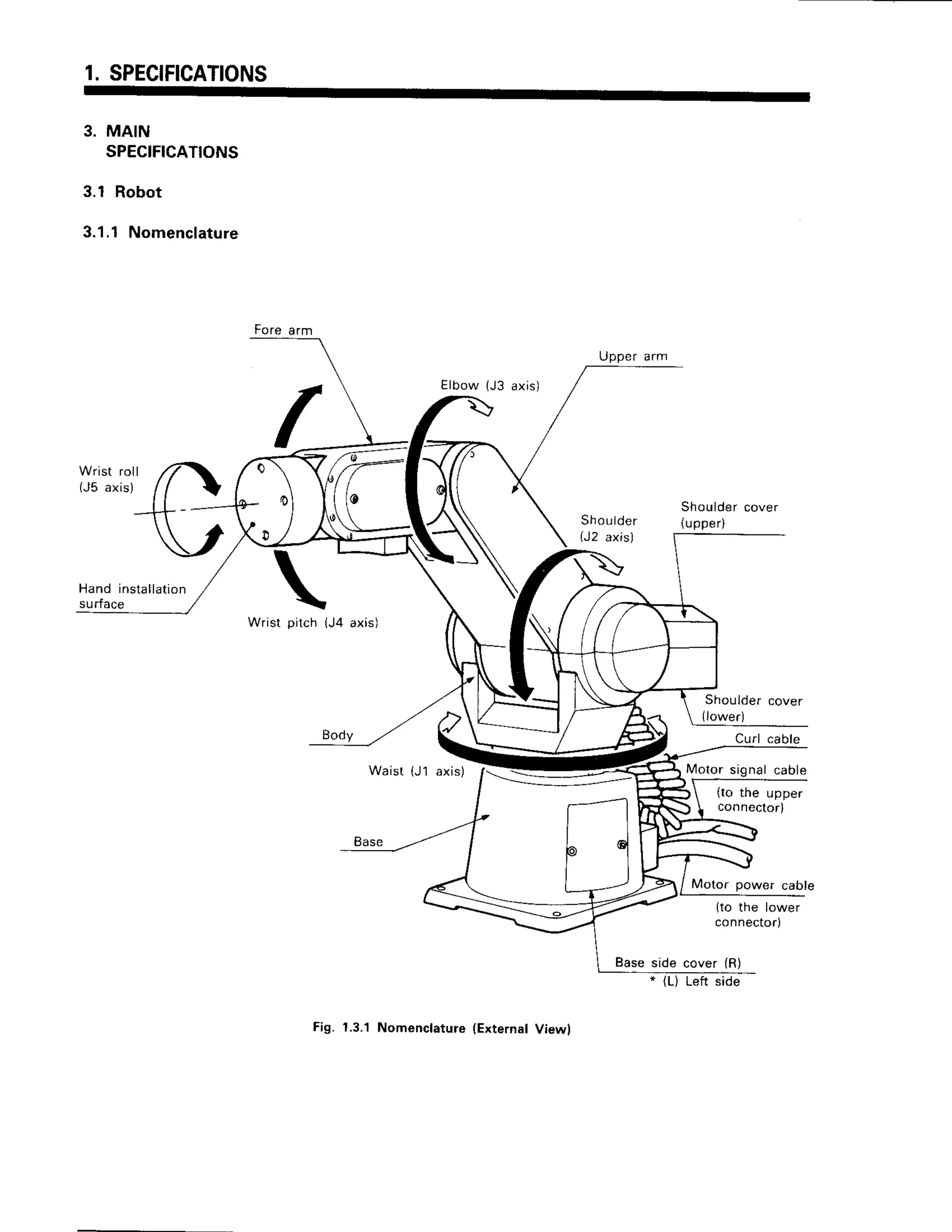




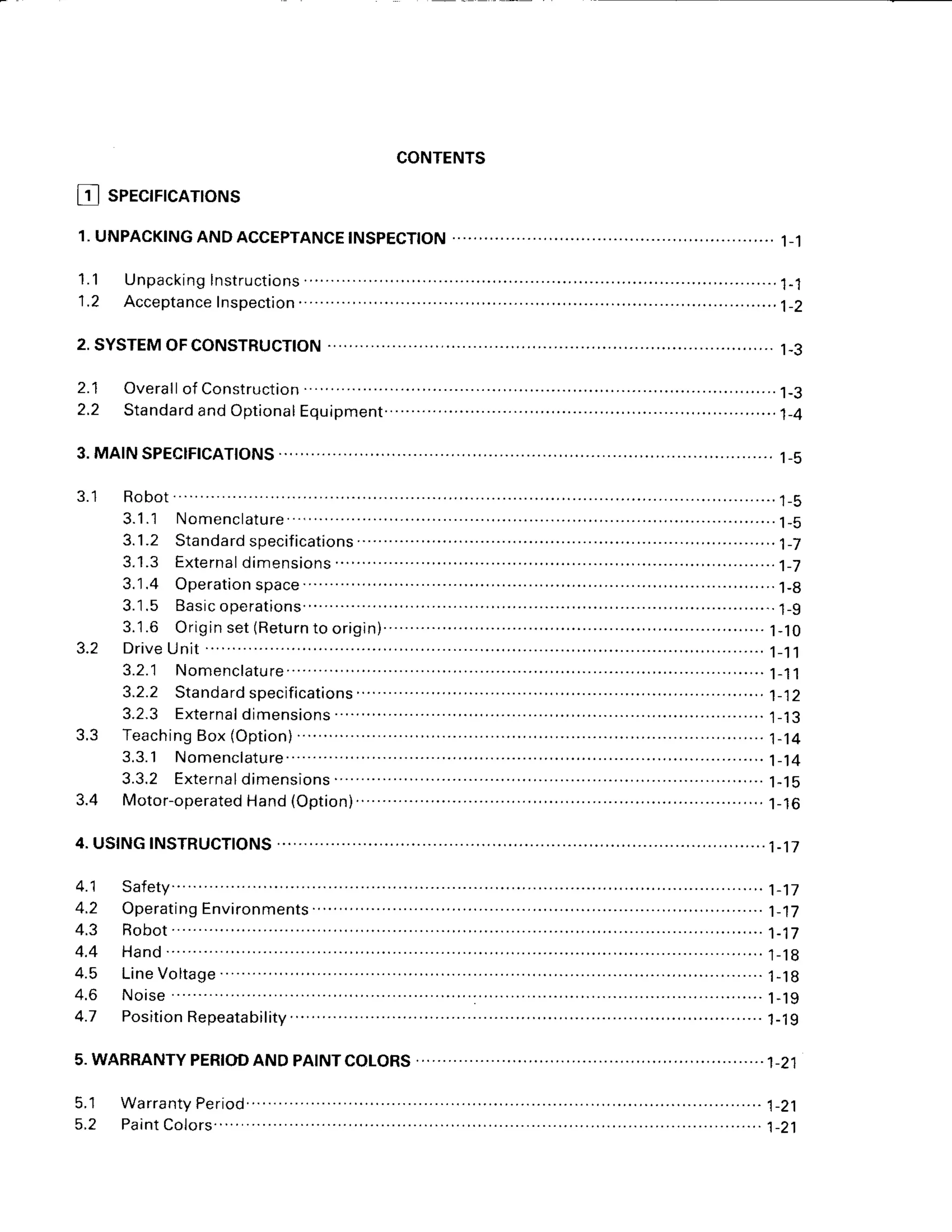
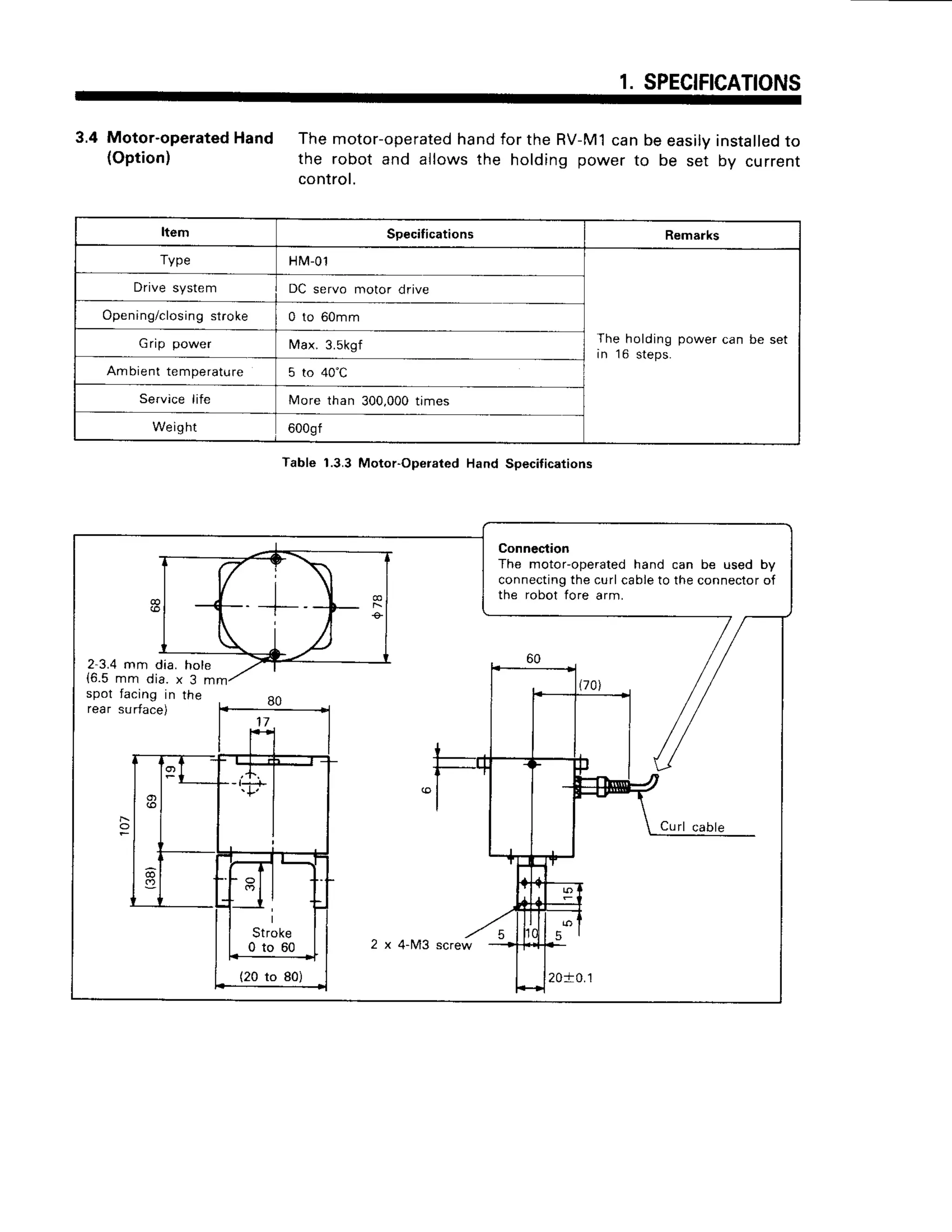
![1.SPECIFICATIONS
3.2.2Standard
specifications
Item Specilications
Teachingmethod
Programminq language system 163 commands), MDI'1 (using a personal
compLlter)
Control method PTP position control system usinq DC sei/o motors
Number of ccntrol axes 5 a,(es{ i l oL,!cna a^ 3l
Position detection Pulse encodei system
Return
to Origin
Originsetting Limit switcheeand pulse en.cdefs (Z phase detectionmethod)
Interpolation functioo Articulaticninterpolation,
linear interpolation
Speedsetting 'lC
stepslmax. 1000n-rmlsec)
Number of positions 629 (8KB)
Number of program sleps 2048 (16K8)
Datastorage
Write to EP ROM iisrng the built-in EP-RO|4
writer or storage in the battery-
backed static RAM lthe battery is optional and backs up the RAfvlfor about 2
years).
Positro
n teachingequipment TeachingDox {option)or personalcomputer*2
Programm
ing equipment Personalcomp!ter*'z
Externall/O
General'purpose
I'O, 6 pointseach (16:plnt type algllab]gL
General-purpose
synchronous
signals
lSTB,BUSY,
ACK,RDY)
No dedicatedl/O (dedicated
l/O of 3 pointseach available)
Powerfor externall/O shouldbe preparedby the user (12Vto 24V DC)
Interface
1 parallel interface (conforming to Centronics)
serial interface(conformrngto RS 232C)
1
Emergencystop
Using any of the front control switch, teaching box switch, and rear terminal
block (N/C contact terminali
Hand control Motor-operated hand or pneum atically-operated irand (using AC solenoid)
Brakecontrol J2 axis(shoulder),
J3 axis(elbow)
Power source 120Vt220V
t230Vt240V
AC, 0.5KVA.-
Ambient temperature 5"C to 40"C
Weight Approx.23kgt
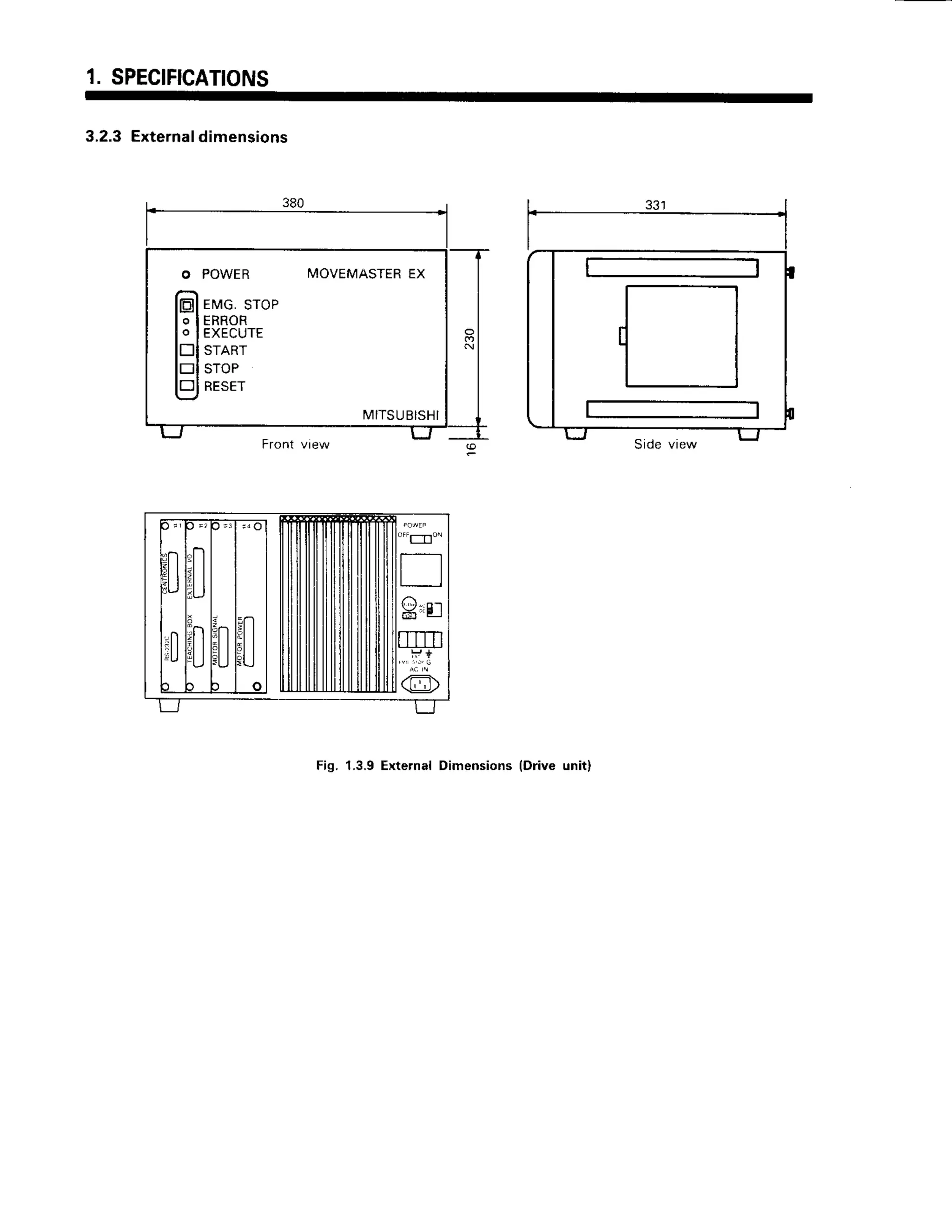
Size 380(W)x 331 (D)x 246{H)mm
Table 1.3,2DriveUnit StandardSpecitications
Note1: MDI standsfor ManualDataInput
Note2: To be preparedby the user.
Note3: Depending
on thesource
powervoltagein yourcountry.](https://image.slidesharecdn.com/movemasterrobot-210420203455/75/Movemaster-robot-24-2048.jpg)




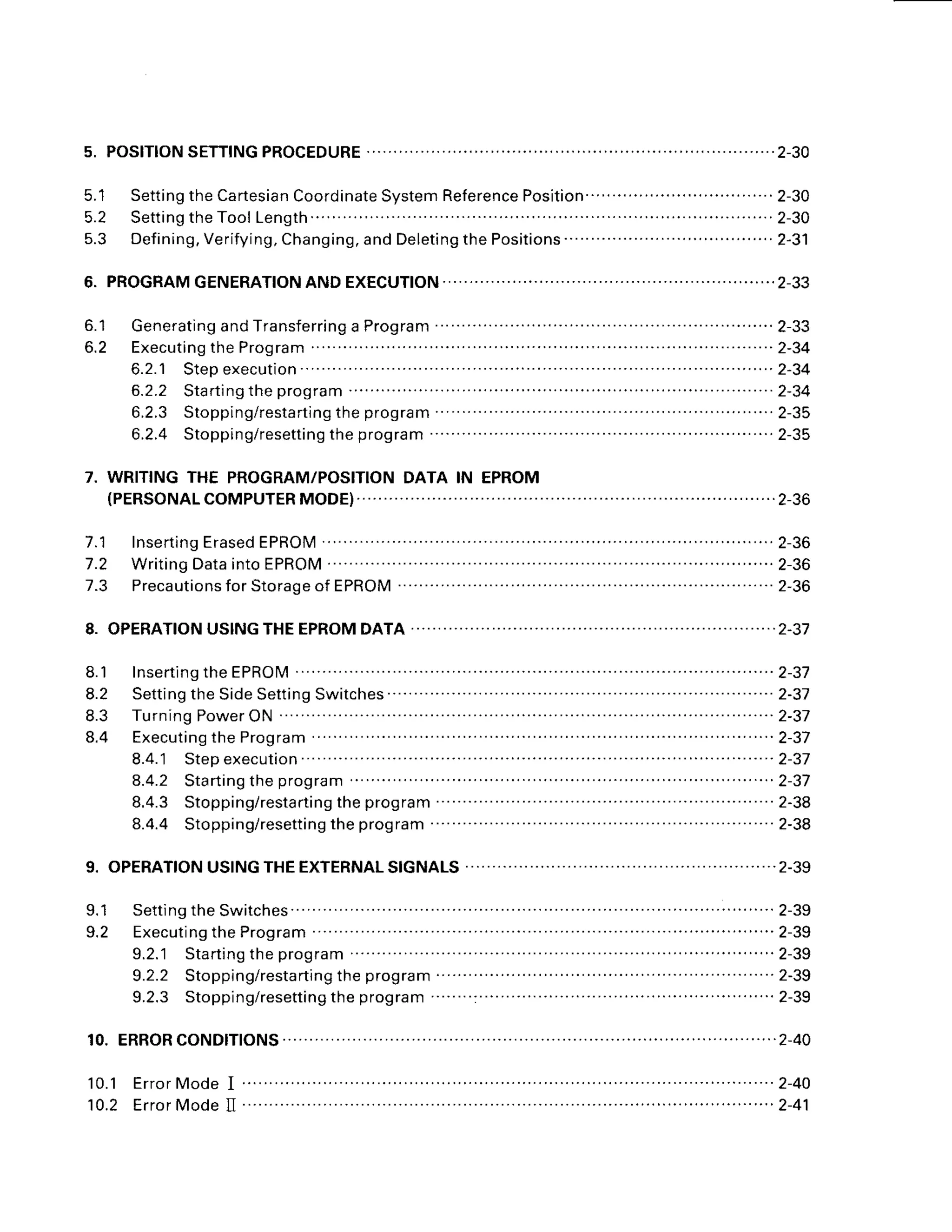
![2. OPERATION
Bit 5: Selects
to enableeitherthe drive unit front control
switches
or external
signals
for runningthe program
whiletypeA16 or 816 l/Ocardis beingused(upper
position:external
signals;lowerposition:front con-
trol switches).
When this bit is set to the uDoer
position.
operation
becomes
possible
by meansof the
dedicated
signallineson the external
liO equipment
connector
on thedriveunitrearpanel,
whilethefront
controlswitches
(except
the emergency
stopswitch)
aredisabled.
Withthebitsetto thelowerposition,
the
frontcontrolswitches
areenabled,
whilethe external
dedicated
signallineis disabled.
Place
the bit in the
lowerpositionwhen tyfleA8 or 88 l/Ocardis to be
useo.
Bit 6: Selectswhetherto enabletf'e Sl] key on the
teachingbox to release
robotbrakes.
Normally,
set
this bit to the lower position.
lsee 2.2.4Releasing
the brakes.)
Bit 7: Not used.
Bit8: Selects
whetherto turn ON or OFFthe buzzer
(upper
position:buzzer
soundswhen an erroroccurs;lower
position: buzzerdoes not sound when an error
occu
rs).
(12)SW2 (RS232C
communication
format settingswitch)
SeeCHAPTER
2INTERFACE
WITHTHEPERSONAL
COMPU-
TER(RS232C),
APPENDIX.
(13)SW3 (RS232C
baud ratesettingswitch)
SeeCHAPTER
2INTERFACE
WITHTHEPERSONAL
COMPU-
TER(RS232C),
APPENDIX.
(14)LEDs1 - 5 (Hardware
errordisplays)
Indicatethe
cause
ofthecorresponding
hardware
error(error
mode I ) when it occurs.
LEDl Excessive
servosystemerrors(1stLEDfrom the
teft)
LED2 Open or disconnected
motor signalcable(2nd
LEDfrom the left)
Driveunitemergency
stopinput(3rdLED
fromthe
left)
Teaching
boxemergency
stopinput(4thLED
from
rhe left)
Backupbatteryfailure(sth LEDfrom the left)](https://image.slidesharecdn.com/movemasterrobot-210420203455/75/Movemaster-robot-51-2048.jpg)
![2. OPERATION
2.2 TeachingBox
2.2.1Functions
ofthe
switches
301
,31
32
L3l
311
361
37
L38l
L39r
40
:4Zl
4 1
27
)
Fig. 2.2.4 Teaching Box
ON/OFF(Power switch)
Selectswhether to enable or disable keys on the teaching
box,When the robot isto be operatedusingthe teaching box,
turn this switch ON. During program run or when controlling
the robot by means of commands sent from a personal
computer,turn the switch OFF.An erroneouskev entrv can
also be cleared by turning the switch OFF.
EMG. STOP (Emergencystop switch)
Pushbuttonswitch used for emergency stop of the robot
{signal is internally latched when this swjtch is presseol.
When the switchis pressed,
the robot is immediatelybrought
to a stop and the error indicatorLEDblinks(errormode I ).
LED4 inside the drive unit side door also comes on.
(28)
2.2.2Functions
ofeachkey (29) INC (+ IENT)
Moves the robot to a predefinedposition with a position
number greater than the current one. To move the robot
through a certainsequence,repeatthe keying-insequence.
(Seecommand
"lP.")
(3r
1141
r46l
i47l
ilEl
191
is0
52i
i53
1541
L56l
(30)
IDE-cl(+
[=NT-]
Moves the robot to a predefined position with a position
number smaller than the current one. To move the robot
through a certainsequence,repeatthe keying-insequence.
{Seecommand
"DP.")](https://image.slidesharecdn.com/movemasterrobot-210420203455/75/Movemaster-robot-54-2048.jpg)
![2. OPERATION
(31)
iP.t (+ !N!.@ + lEttfr
Definesthe coordinatesof the current position of the robot
into a position
with the numberspecified.
lf a singlenumber
is assignedto two differentpositions,the one defined last
takesprecedence.
(Seecommand
"HE.")
132), cl r+tN,;crl + Egf)
Deletesthe contentsof a positionwith the number specified.
{Seecommand
"PC.")
(33)
lNSil {+ [FNT]
Returnsthe robot to origin. (See command
"NT.")
(34)
l-bRq-
(+ ENr--)
Moves the robot to the referenceposition in the cartesian
coordinate
system.(Seecommand "OG.")
(35)
mNl(+EE)
Transfers
the contentsof the user EpROM(programano
position
data)installed
in SOC2
of thedriveunitsidepanel
to
the driveunit RAM.(Seecommand"TR.")
(36)
@ (+ fENil)
Writes
theprogram
andposition
datawritteninthedriveuntt
RAMintothe userEPRoMinstalled
in soc2 0f thedriveuntr
sidepanel.
(Seecommand"CR.")
(37)
lMotl (+ [Nfitt] + [ENi])
Movesthe end of the hand to a specifiedposition.(See
command"MO.")The movingspeedis equivalent
to SP4.
(38)
l-rEF (+:M;Grl + aENl
Executesthe program step by step starting with the line
number specified.To cause the program to be executed
sequentiallyfrom one step to another,repeatthe keying-in
sequence. Note that, at this time, no number entry is
necessary.
Error mode II is causedif an error occurswhile
the steps are being executed.
(3e)
[FrPi
Selects the articulatedjog operation. When this key is
pressed,operationof any jog keythereaftereffectsa motion
in eachjoint.In the initialcondition
when the teaching
box is
turned ON, this PTP state is set.
Selectsthe cartesian
jog operation.When this key is pressed,
operationof any jog key thereaftereffectsan axis motion in
the cartesiancoordinatesystem.
(40)](https://image.slidesharecdn.com/movemasterrobot-210420203455/75/Movemaster-robot-55-2048.jpg)
![2. OPERATION
(50)
( 5 1
)
[F--e
Turnsthe end of the hand,while maintaining
its current
positiondetermined
by the "TL" command,in the negative
direction
(downward)
inthecartesian
jog andbends
thewrist
(wrist pitch)in the negativedirectionldownward)in the
articulated
jog. lt also servesas the numerickey "8.".
tR+2
Twists
thewrist(wristroll)inthepositive
direction
{clockwise
looking
towardthehandmountingsurface).
lt alsoserves
as
the numerickey "2."
(53)
,-^, t^
---=
czl lI t l
(57)
(58)
Twiststhe wrist (wristroll)in the negative
direction
(coun-
terclockwise
lookingtowardthe handmoundingsurface).
lt
also servesas the numerickey "7."
FoprrorlTll
Moves the optional axis in the positive direction. lt also
serves as the numeric key
"1,"
Movesthe optionalaxis in the negativedirection.lt also
serves
as the numeric
key "6."
t<otal
Opensthe handgripper.lt alsoservesas the numerickey
" 0 . "
(55)
(s6)
The
tlc< 5l
Closesthe hand gripper. lt also serves as the
c .
4-digit LED shows the following information.
Positio
n number
Shows the position number in 3 digits when
lP.='1,
Eql, o' lrvtbvlkeyis beins
used.
Program
linenumber
numerickey
Functions
of the
indicator
LED
[Ni], JoEfl
Showstheprogramlinenumberin 4 digitswhen[SiiPlkey
is beingusedor when programis running.
(59)Teaching
box statusindicator
(thefirst digit from the left)
"-
1"meansprocessing
invoked
by depression
of ENTkeyis
eitherin progress
or at an end.
"!" meansprocessing
invokedby depression
of ENTkey
cannotbe carriedout.](https://image.slidesharecdn.com/movemasterrobot-210420203455/75/Movemaster-robot-57-2048.jpg)
![2. OPERATION
3.3.2
Driveunitmode I q 6 + r i h ^ n / ^ ^ a ; | , 1 6 l
Setthetoggleswitch{ST1)
located
inside
thedriveunitsidedoor
to the upper position.
IExplanation]
Thismodeallowsthe programstoredin the driveunitEPROM
or
batte
ry-backed-u
p RAM to be executed(corresponding
to 3.1.2
Systemconfiguration
centeringaroundthe drive unit).In this
mode,thefrontcontrolswitches
ofthedriveunitareusedto start,
stop,and resetthe program.
lf type,A16
or B'16
l/Ocardis being
used,operationis possibleby meansof externalsignals.Any
commandsentfrom the personal
computeris not honored.](https://image.slidesharecdn.com/movemasterrobot-210420203455/75/Movemaster-robot-64-2048.jpg)
![2. OPERATION
(4) Deletingpositions
You may even wish to deletesome posjtions.
'1)
To deleteposition10,hit the followingkeyssuccessively:
E t r t r N ]
Thisclears
position
10making
it available
for newde|nr_
tion.
2) Toverifythatposition
l0 hasbeenproperly
deleted,
hitrhe
followingkeyssuccessivery:
trbvln tr ENf
lf theposition
datahasbeenproperly
deleted,
theteachina
boxstatusindicator
LEDshows,,f ', whichindicates
tha-t
the functioninvokedcannotbe performed.](https://image.slidesharecdn.com/movemasterrobot-210420203455/75/Movemaster-robot-68-2048.jpg)
![2. OPERATION
6. PROGRAM
GENERATION
This chapterdescribes
the procedures
requiredto generatea
ANDEXECUTION programin the personal
computermodeby usingthe positions
previously
definedand to executeit.
The description
that followsassumes
the teachingbox ON/OFF
switchis in the OFFposition.
6.1 Generating
and Wewill heregenerate
a modelprogramin thepersonal
computer
Transferring
a Program mode describedearlier.Now, why don't we write a simple
programusingthreepositions
{numbered
10,11,and 12)?
The
followingliststhe programsequence,
wherethe numbersat the
beginning
represent
the Movemaster
programlinenumbers.
For
details
ofthecommands,
seeDESCRIPTION
OFTHECOMMANDS.
With the Centronicsinterface,executethe following BASIC
program
to transfer
theaboveprogram
to thedriveunit.Notethat
the numbers
at the beginning
showthe BASIC
linenumbers.
Movemaster
program
1 ON T
1 2 5 P 7
14 tll0 10, O
16 t,10
11,C
18 tvtO12,C
20 Tt 30
22 Gr 14
BASICprogram
1OO
LPRINT
"10 NT"
1',10
LPRINT
"12 SP 7"
1 2 0L P R T N T
" 1 4 M O 1 0 ,O "
1 3 0L P R T N T
" 1 6 M O 1 1 ,C "
140LPRINT
"18 MO 12,C"
150LPRTNT
"20 r 30"
160LPRINT
"22 CT 14"
1 7 0E N D
R U N
OK
Origin setting (nesting).
Set speed at 7.
lMove to position 10 with hand opened.
Move to position 11 with hand closed.
Move to position 12 with hand closed.
Stop for 3 seconds.
Jump to line number 14.
; E n d B A S I Cp r o g r a m .
; Run BASICprogram.
Forthe RS232C
interface,
execute
the followingBASIC
program.
Fordetails
of thesettings
to be made,seeCHAPTER
2 INTERFACE
WITHTHE PERSONAL
COM]PUTER
(RS232C).
APPENDIX](https://image.slidesharecdn.com/movemasterrobot-210420203455/75/Movemaster-robot-69-2048.jpg)
![2. OPERATION
6.2.3 Stopping/restarting
the program
6.2.4 Stopping/resetting
the program
Restarting : Pressthe
to restart
sroppeo.
switch.Thiscauses
the program
linenumberfollowing
the one
2) Execute
the command"RN" to directlyrun the program.
LPRINT
"RN" (Centron
ics
)
PRINTlt1, "RN"
{RS232C)
Whilethe program
is running,
thecurrent
linenumberrs
shown on the teachingbox LED.
The programcurrently
runningcan be stoppedand restarted
by
operating
certain
switches
on the frontcontrolpanelof the drive
unit.
, E=-;]
Stopping : Pressthe ISTOP; switch, and the robot stops after
completing executingthe current line number. This
means that, if the robot is executinga move com-
mand when the switch is pressed,it will complete
reaching the destination point. At this time, the
teachingbox LEDshows the line number in which the
robot was stoDoed.
TurningONtheteaching
boxON/OFF
switchwhiletheprogramis
beinghalted
enables
theoperation
fromtheteaching
box.Besure,
however,to turn the switch OFF before pressingti e [Si[Ril
switchto restart
the program.
Notealsothatno commandcanbe
executedfrom the personalcomputereven in the personal
computermodewhilethe programis beinghalted.To execute
commands,performthe followingresetting
operation.
The programcurrentlyrunningcan be stoppedand resetby
operating
certain
switches
on the frontcontrolpanelof the drive
unit. When reset,the programreturnsto its beginning.lf the
program
is terminated
by thecommand
"ED,"it endsnormally.
. f ^=::-t
Stopping : Pressthe I STOP switch.The operationisthe sameas
described before
Resetting: Pressthe _B_LS_ll
switchafterthe STOP switchhas
been pressed,and the program is reset.
To restartthe program following the resettingoperation in the
personalcomputer mode, the command
"RN"
must be used.At
this time, pressingthe ISi[Ril s*itch doesnot startthe program.
Note also that the general-purposel/O outputs are not reset.
f rom the](https://image.slidesharecdn.com/movemasterrobot-210420203455/75/Movemaster-robot-71-2048.jpg)
![2. OPERATION
7. wRlrlNGTHE Theprogramand positiondatawrittenin the driveunit memory
PROGRAM/POSITIONRAM can be storedin the EPROIVI.
The followinqdescribes
the
DATAlN EPROM proced
ure.
(PERSONAL
COMPUTER
MODE)
7.1 Inserting
Erased
EPRoMInserta new EPROMor one erasedby the EpRoMeraser(the
;"#
[::::3,
:i,ffi
T,T
:ff,::
i:"
y:f
:::[T:i3
"':l
:#i:
;ure of the correctinstallation
directionof the EPROM:the
Indentation
must be positioned
on the left.
7.2 WritingDatainto
EPROM
We shall now write the contentsof the drive unit RAM into the
EPROI4
.
Using the teaching box
1) Turn ON the teachingbox ON/OFFwitch.
2) Press WRTj and []!1,] , successivety
in that order.
qsllg t!191!fS9!1_!9
nr ! through the persona|computer
1) Turn OFFthe teaching
box ON/OFF
switch.
2) Execute
the command"WR" in directexecution
mode.
LPRINT
"WR" (Centronics)
PRINTf 1, "WR" (RS232C)
y"'ii""'::i:';fi
?,:H;lffi
?;:"Ti:iil;y;'J;'i:191'.'"?
)ut in about 100secondsafterthe data has beenwritten correctly.
Do not removethe EPROMfrom the socketuntilthe LEDgoesout.
Shouldthe databe written incorrectly(dueto an EpROMfailureor
write error),it causeserror mode ll. lf the error conditionoccur.
reset the condition and trv another EPROM.
7.3 Precautions
for Storage Be sure to affix an ultravioletrays shieldingseal onto the glass
of EPROM window of the EPROMinto which data has beenwrittento ensure
data integrity.When the EPROMisto be storedoff the socket,take
necessarypreventivemeasuresagainst electrostaticcharge.](https://image.slidesharecdn.com/movemasterrobot-210420203455/75/Movemaster-robot-72-2048.jpg)

![2. OPERATION
10.2 ErrorMode II Error mode ]I is concernedmostly with softwareerrors.No
indicator
is provided
for errormodellto lettheoperator
knowthe
causeof the error.
(Warning
indicato
rs)
Theerrorindicator
LED(red)
onthedriveunitfrontpanellightsup
steadily.
Thebuzzer,
if setto ON,alsosounds
continuously.
lf type
A16 or 816l/Ocardis beingused,an errorsignalis outputfrom
the dedicated
signallineof the external
l/Oequipment
connector
just as in errormode I.
(Condition)
The systementersthe modewaitingfor errorreset.lf the error
occurs
whilea programis running,
the programstopsat the line
numberon whichtheerroroccurs,
the linenumberbeinoshown
on the teachinobox LED.
(Possible
causes
)
(1) Commandtransfererror by the personalcomputer.More
specifically,
an undefined
command,input format error,or
transmtssron
error.
Commandis beingunexecutable.
Moreprecisely,
an entryof
parameter
exceeding
the specified
rangeor movecommand
to an undefined
position.
EPROM
writeerror.Morespecifically,
theEPROM
unerased
or
EPROM
failure,
(Remedial action)
Perform either of the following resettingoperations.
Using drive unit switch
Pressthe switch.
Usingintelligent
commands
throughthe personal
computer
(in
personal
computermode)
Turn OFFthe teachingbox ON/OFF
switchand execute
the
command"RS" in directexecutionmode.
LPRINT
"RS"
{Centronics)
PRINTf 1, "RS" (RS232C)
Usingdedicated
signalline of l/O connector
Turn ON the RESET
inputsignal.
Theerrorindicator
LEDgoesout as soonas the aboveresetting
procedure
hasbeencompleted.
Theprogram,
if it hasbeenbeing
executed,
is reset
andit will bestarted
fromthefirstlinenumberif
restarted.
Notethatgeneral-purpose
l/Ooutputsarenot resetby
this resetting
operation.
(2)
(3)](https://image.slidesharecdn.com/movemasterrobot-210420203455/75/Movemaster-robot-77-2048.jpg)


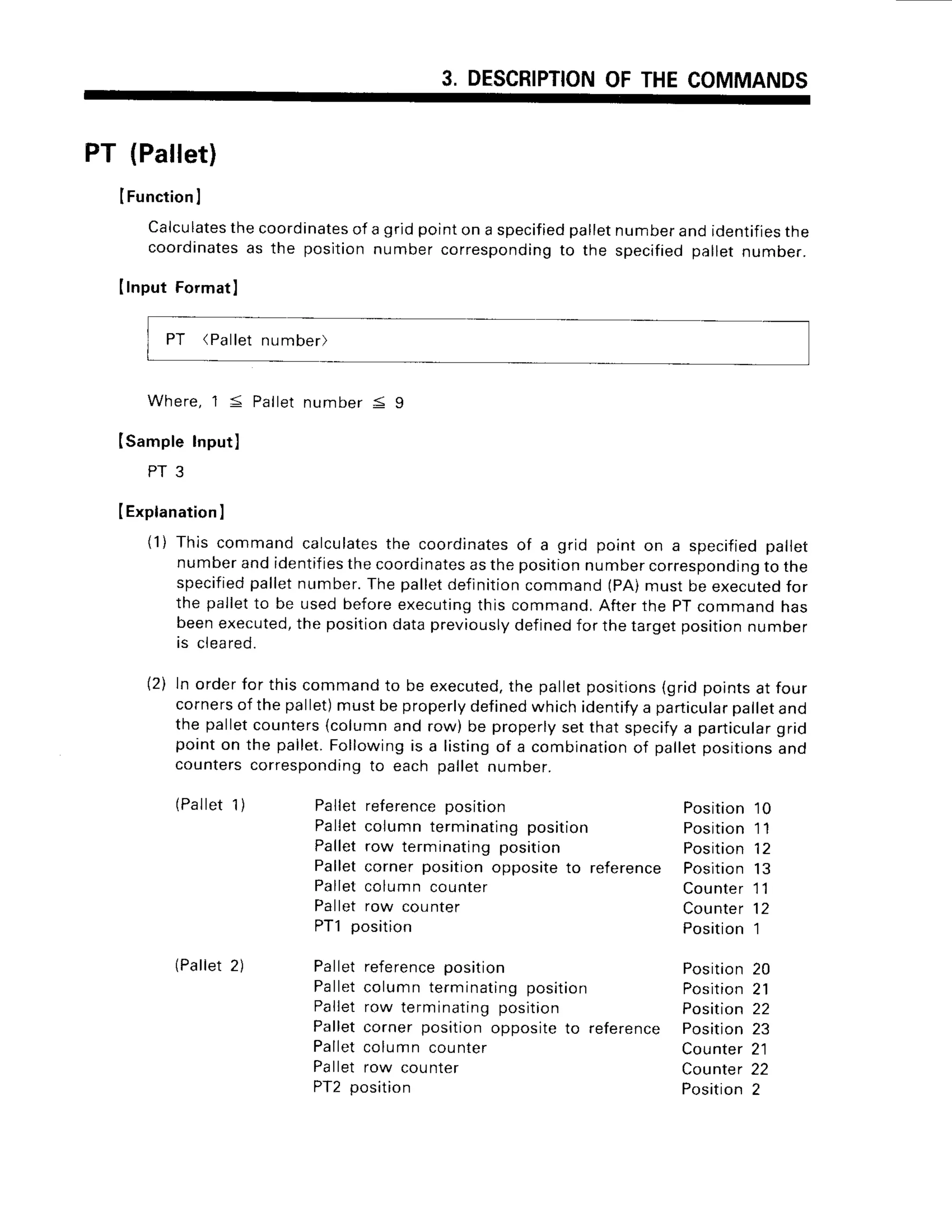
![3. DESCRIPTION
OFTHECOMMANDS
2. DESCRIPTION
OFEACH Thefollowingpagesexplain
eachcommandin theformatshown
COMMAND below.Notethat thosecommandsmarkedwith X can only be
executeddirectly by the personalcomputer and cannot be
programmed.
IFunction
I Givesa briefdescription
of the function
invokedbv the command.
IlnputFormatl
ISampleInputl
(Explanation
I
Isample
Program
) '
Shows the arrangement
of the com-
mandentry, ( ) indicating
the com-
mandparameter
and [ ] indicating
the
parameter
that can be omitted.
Showsa typicalcommandentry.
Explains
the detailedfunctionor func-
tionsto beinvoked
bythecommand
and
givessome precautions
for use.
Gives a typical program with exact
meaningsof each line and/or some
footnotes.](https://image.slidesharecdn.com/movemasterrobot-210420203455/75/Movemaster-robot-82-2048.jpg)
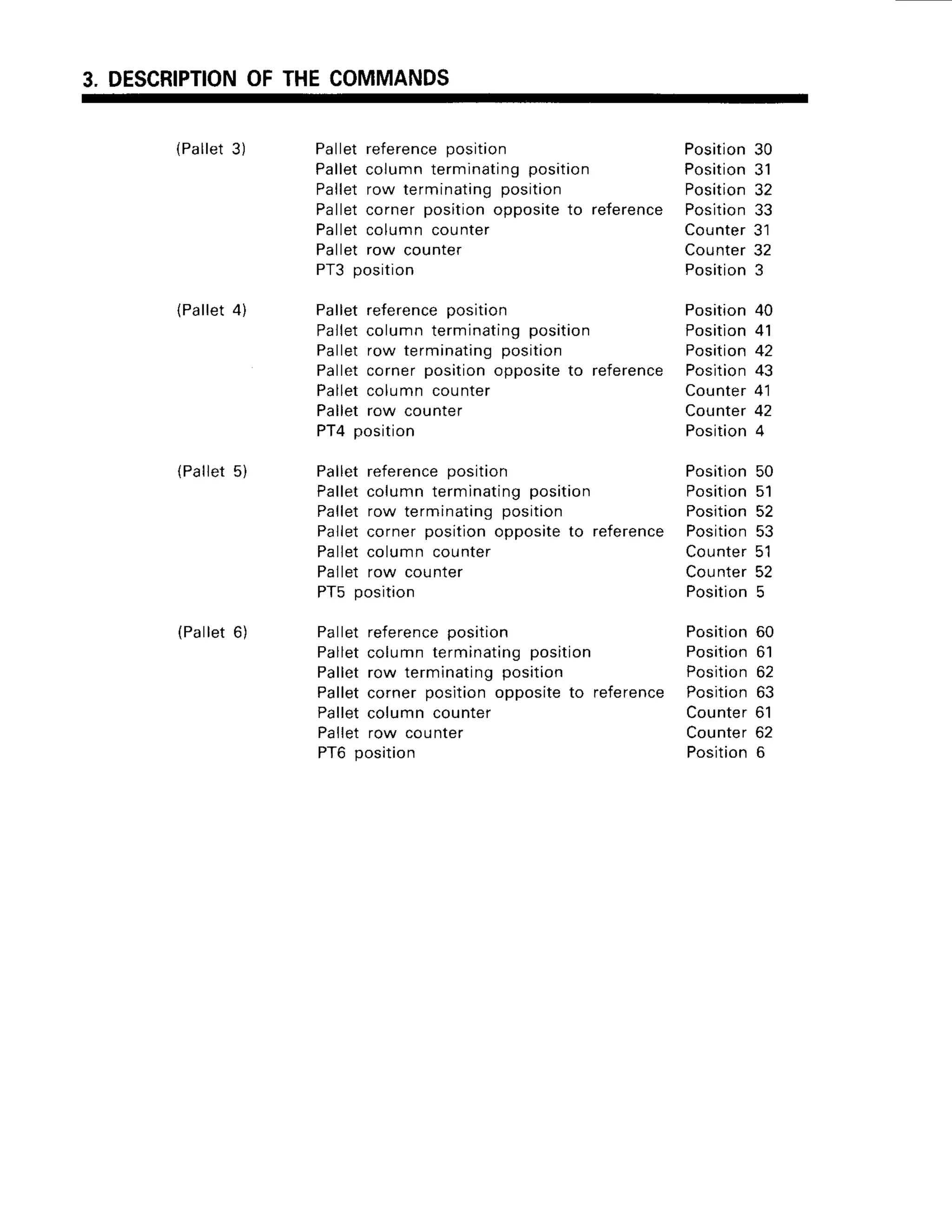
![3. DESCRIPTION
OFTHECOMMANDS
2.1 Position/Motion
Control
Instructions
DP (Decrement
Position)
IFunction
I
Moves
the robotto a predefined
position
with a position
number
smaller
thanthe
currentone.
IInputFormatl
Isample Input)
DP
IExplanation
I
(1) Thiscommandcauses
the robotto moveto a predefined
position
with a position
numbersmallerthan, and closestto, the currentone. (Seecommandlp.)
(2) lf thereis no predefined
position
with a position
numbersmaller
thanthe current
one, error mode II is caused.
Isample Program
I
10 LPRINT
"MO 3"
20 LPRINT
''MO 4"
30 LPRINT
"IV]O5"
40 LPRINT
"DP"
Move to positio
n 3.
lvloveto position4.
Move to position5.
Move to position4.
DP](https://image.slidesharecdn.com/movemasterrobot-210420203455/75/Movemaster-robot-83-2048.jpg)
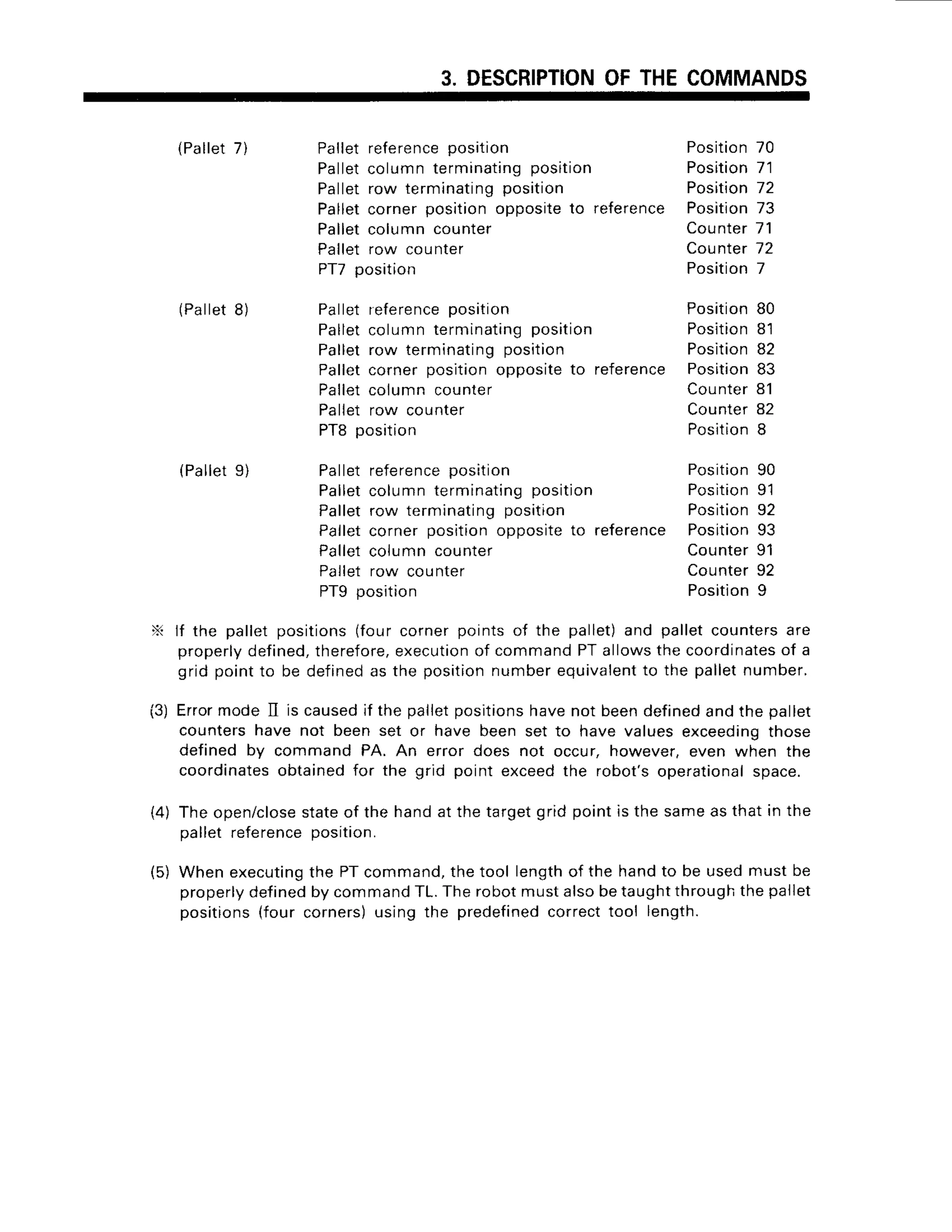
![3. DESCRIPTION
OFTHECOMMANDS
DW (Draw)
(Function
I
Movesthe end of the hanoro
distancespecified
in the X-, y-
(lnput Formatl
a positionaway from the currenr
, and Z-axisdirections.
one coveringthe
(sample tnput)
DW 10.5,20.5,
-30.5
IExplanation
I
(1) Theleastinputincrement
for thedistance
of travelis o.1mm.(e.g.specify
20.1for
2 0 . 1 m m . )
Theattitude
of the hand,including
open/close
stateof the gripper,
do not change
beforeand afterthe movement.
Errormode II is causedif the distance
of travel
exceeds
the robot'soperational
space.
The defaultdistance
of travelis 0.
sincethe motionis based
on articulated
interpolation,
thecombined
motionof the
end of the hand generates
an arcwhen a longerdistance
of travelis involved.
The positionof the end of hand is determinedby the tool length currently
established.
(see commandTL.)
ISampleProgram
I
10 LPRINT
"DW 20,0,0"
20 LPRTNT
"DW 0,20,0"
30 LPRINT
"DW -20,0,0"
40 LPRINT
"DW
0,_20,0" Start
point
X In the aboveexample,
the end of the hand
squareto reachthe start point finally.
movesthroughthe four cornersof a
t2)
(3)
(4)
{s)
DW[ (Travel
distance
in X) ], [ (Travel
distance
iny) ], I (Travel
distance
in Z) I](https://image.slidesharecdn.com/movemasterrobot-210420203455/75/Movemaster-robot-84-2048.jpg)
![3. DESCRIPTION
OFTHECOMMANDS
HE (Here)
IFunction
I
Defines
thecoordinates
of thecurrent
IInputFormat]
positionby assigning
a positionnumberto it.
HE (Positio
n number)
Where,1 5 Positionnumber 5 629
ISampleInputl
H E 5
(Explanation
I
(1) The coordinates
of the currentpositionis calculated
basedon the currently
established
tool length(seecommand
rL). Inthe initialcondition,
thetool lengthis
107mm, a point 107mm awayfrom the centerof the hand mountingsurface
towardthe end of the hand.
lf a singlenumberis assigned
to two different
positions.
theonedefined
lasttakes
precedence
with the former creareo.
The open/close
positionof the hand is also storedas the positiondata.
Execution
ofthiscommand
whenanyoftheaxesoftherobotispositioned
nearthe
boundary
of itsoperational
spacemaycauseerrormode II. In suchcases,
avoid
such attitudeof the robot.
ErrormodeII iscaused
if thiscommandisexecuted
before
therobotreturns
to the
ongIn.
IsamptePrograml
1OLPRINT
"MO10"
20 LPRINT
"DW 1O,O,O"
30 LPRINT
"HE11'
tzJ
{3)
(4)
(5)
Move to position10.
Move 1Ommin *X direction.
ldentifyabovepositionas position11.](https://image.slidesharecdn.com/movemasterrobot-210420203455/75/Movemaster-robot-85-2048.jpg)
![3. DESCRIPTION
OFTHECOMMANDS
MA (Move Approach)
(FunctionI
Movesthe end of the handfrom the currentpositionto a positionaway from a specified
position in incrementsas specifiedfor another position.
IlnputFormatl
MA (Position
number(a)), (Position
number(b)) [, (O or C) ]
Where,1 5 Positionnumber(a),(b) < 629
Isample Input)
M A 2 . 3 . C
(Explanation
l
(1) Thiscommandcauses
the endof the handto movefrom the currentposition
to a
position
awayfrom position
(a)in increments
as specified
for position
(b).lt does
not changethe coordinates
of positions(a) and (b).(SeecommandSF.)
(Eachcoordinateof position (b) is temporaryadded to the corresponding
coordinate
of position(a).)
(2) lf theopen/close
stateofthehandhasbeenspecified
(O:open;C:closed),
therobot
movesafterexecuting
the handcontrolinstruction.
lf it hasnotbeenspecified,
the
hand statein position(a) remainsvalid.
(3) lf the calculated
incremental
dimensions
exceedthe robot'soperational
space,
error mode II is causedbeforethe robot moves.
(4) Errormode II is alsocausedif positions
(a)and (b) havenot beendefinedyet.
(5) The positionof the end of the hand is determined
by the tool lengthcurrently
established.
{see commandTL.
)
ISampleProgram
)
1 0 L P R I N T
" H E 1 "
20 LPRTNT
"PD 5, 0, 0, 30, 0, 0"
30 LPRINT
"MA 1, 5, O'
N In the aboveexample,
the end of the handis movedwith the handopenedfrom
position
1to a position
in 30-mmincrements
onlyintheZ-axis
direction.
Thevalues
of coordinates
of positions1 and 5 do not change.](https://image.slidesharecdn.com/movemasterrobot-210420203455/75/Movemaster-robot-88-2048.jpg)

![3. DESCRIPTION
OFTHECOMMANDS
MJX (Move
IFunction
I
Turns each
IInput Formatl
Joint)
joint the specified
anglefrom the currentposition.
MJ [ (Waist
turning
angle)],I (Shoulder
turning
angle)l, [ (Elbow
turning
angle)
l , { ( P i t c h
a n g l e )l , [ ( R o l l a n g l e )]
ISampleInput)
MJ 10,20, -30, 40, -50
(Explanation
I
(1) The leastinputincrement
of the turningangleis 0.'1'.
(2) Theopen/close
stateof the handdoesnotchange
beforeandafterthe movement.
Errormove II is caused
before
the axismotionif theturningangleentryexceeds
the robot'soperational
space.
The defaultturningangleis 0.
The positiveand negativedirections
of eachaxis of motionare as follows.
Isample Program
)
10 LPRINT
"MJ
+90, O,O,O,
2 0 L P R I N T
" M J O ,- 3 0 , 0 , 0 ,
30 LPRTNT
"MJ 0, 0, 0, +20,
X In the above example,line number
'10
causesthe waist to sweep g0'in the *
direction,line number 20 causesthe shoulderto swivel 30' in the - direction,and
line number 30 causesthe wrist to bend 20" in the * direction.
(3)
(4)
0 "
0 "
0 "
Wrist roll
Shoulder Elbow rist
)](https://image.slidesharecdn.com/movemasterrobot-210420203455/75/Movemaster-robot-91-2048.jpg)
![3, DESCRIPTION
OFTHECOMMANDS
MO (Move)
IFunction
I
Moves the end of the hand to a specifiedposition.
I Input Formatl
MO (Position
number) [, (O or C) ]
Where,'1
5 Positionnumber 5 629
Isample Input)
M O 2 , C
IExplanation
I
(1) This commandcausesthe end of the handto move to the coordinates
of the
specified
position
by articulated
interpolation.
Theposition
oftheendofthehandls
determinedby the tool lengthcurrentlyestablished.
(SeecommandTL.)
(2) lf theopen/close
stateof thehandhasbeenspecified
(O:open;C:closed),
theend
of the handmovesafterexecuting
the handcontrolinstruction.
lf it hasnot been
specified,
the definitionof the specified
positionis executed.
(3) Errormode II is causedif the specified
positionhasnot beenpredefined
or the
movementexceeds
the robot'soperational
soace.
(sample Program)
10 LPRINT
"SP 5" ; Set speedat 5.
20 LPRINT
"MO 20, C" ; Move to oosition20 with hand closed.
30 LPRINT
"MO 30, O" ; Move to position30 with hand open.](https://image.slidesharecdn.com/movemasterrobot-210420203455/75/Movemaster-robot-92-2048.jpg)
![3. DESCRIPTION
OFTHECOMMANDS
MPX (Move Position)
IFunction
I
Moves
theendof thehandto a position
whose
coordinates
(position
andangle)
are
specified.
IlnputFormat)
MP[ (X-axis
coordinate)
l, [ (Y-axis
coordinate)
], [ (Z-axis
coordinate)
], [ (pitch
a n g l e )l , [ ( R o l l a n g l e )]
(sample Inputl
MP 0, 380.300,-70. -40
I Explanation
)
(1) The leastinputincrement
of the coordinate
valuesis 0.1mmor 0.'1".
(e.g.specify
20.1for 20.1mm.)
(21ErrormodeII is caused
if thespecified
coordinates
exceed
the robot'soperational
sDace.
{3) The defaultcoordinate
value is 0.
(4) Theopen/close
stateof the handdoesnot changebeforeand afterthe movement.
(5) The positionof the end of the hand is determined
by the tool lengthcurrently
established.
(see commandTL.)
ISampleProgram)
10 LPRTNT
"PD 1, 0, 380,300,-70, -40"
20 LPRINT
"MO 1"
30 LPRINT"MP 0, 380,280,-70, -40"
X In the aboveexample,
the end of the handis first movedto position1 and then
moved20mmdowninZ-axis
direction
by linenumber
30,theopen/close
state
ofthe
handremaining
unchanged.](https://image.slidesharecdn.com/movemasterrobot-210420203455/75/Movemaster-robot-93-2048.jpg)
![3. DESCRIPTION
OFTHECOMMANDS
MS (Move Straight)
(Function
I
Movesthe robot to
intermediate
points
Ilnput Format)
MS (Position
number), (No. of intermediate
points) [, (O or C) ]
Where,1 5 Positionnumber 5 629
1 < No. of rntermediate
points< 99
ISampleInput]
M S 2 , 5 , C
(Explanation
)
{1) Thenumberof intermediate
pointsbetween
thecurrentposltion
andthe specified
position
numberiscalculated
byequally
dividing
thedistance
oftravelandposition
angle(pitch/roll
angle)
between
thetwo positions
(thenumberof divisions
equaling
thenumberof intermediate
pointsplus'1
).Acceleration
anddeceleration
duringthe
movementare omitted.
{2) The morethe numberof specified
intermediate
points,the smoother
the straight
linefor the movementpath,butthe moretime required
for calculation
beforethe
robot startsmoving (99 intermediate
pointsrequiresabout 2.4 seconds).
lt rs
thereforerecommended
that the numberof intermediate
points be specified
according
to the distance
of traveland the requiredpath accuracy.
lf any of the intermediatepoints specifiedexceedsthe robot's operationalspace,
the robot stops in mid-motion and error mode ]I is caused.
lf the open/close
stateof the hand has beenspecified(O: open; C: closed),the robot
moves afterexecutingthe hand controlinstruction.lf it has not beenspecified,
the
definition of the soecified oosition is executed.
(5) Errormode II is causedif the specified
positionhas not been predefined.
(6) The positionsof the intermediatepoints are calculatedbased on the tool length
currently established.(See command TL.)
(7) Certain
positions
of therobotmaycause
oscillations.
Insuchcases,
keep
thespeed
low.
a specified
positionnumberthroughthe specified
numberof
on a straight
line.
(3)
(4)](https://image.slidesharecdn.com/movemasterrobot-210420203455/75/Movemaster-robot-94-2048.jpg)

![3. DESCRIPTION
OFTHECOMMANDS
MT (Move Tool)
(Function
I
Moves
theendofthehand
fromthecurrent
position
toaposition
away
fromaspecified
position
in increments
as specified
in the tool direction.
IlnputFormatl
MT ( Position
number), [ (Traveldistance)] [, (O or C) ]
Where,1 5 Positionnumber5 629
Isample Input)
MT 5. +70. O
IExplanation
I
11)Theleastinputincrement
of thedistance
of travelis 0.1mm.(e.9.specify150.5
for
150.5m
m.)
(2) Whenthe distance
of travelentered
is positive
(*), the endof the handadvances
alongthe specified
distance
in the tool direction.
Whenthe distance
of travelis
negative
(-), theendretracts
alongthespecified
distance
inthetooldirection.
(The
defaultdistanceis 0.)
(3) lf theopen/close
stateof thehandhasbeenspecified
(O:open;C: closed),
theend
of the handmovesafterexecuting
the handcontrolinstruction.
lf it hasnot been
specified,
the definitionof the specified
positionis executed.
(4) Error mode II is causedbeforethe end of the hand startsmovingwhen the
destination
exceeds
the robot'soperational
space.
lt is alsocaused
if thespecified
positionhas not been predefined
or is out of the operational
space.
(5) The positionof the end of the hand is determined
by the tool lengthcurrently
established.
(SeecommandTL.)
(sample Program)
1 0 L P R I N T
" H E 1 "
20 LPRINT
"IVIT1, +30, C"
X Intheaboveexample,
linenumber20defines
the reference
position
asthecurrent
position;as a result,the end of the hand is advanced
30mm,from the current
positionin the tool direction,
with the hand closed.](https://image.slidesharecdn.com/movemasterrobot-210420203455/75/Movemaster-robot-96-2048.jpg)
![3. DESCRIPTION
OFTHECOMMANDS
PCX (PositionClear)
(Function
I
Clearsthe positiondata of specified
positionnumberor numbers.
IInput Format
I
PC (Position
number1a)) [, (Position
number(b)) ]
Where,'l < Positionnumber(a),(b) < 629
(SampleInput)
P C 5 , 8
I Explanation
I
(1) Thiscommand
clears
allposition
data
fromposition
(a)uptoandincluding
position
(b).
(2) lf position(b) is omitted,the positiondata of only position(a) is cleared.
(3) Becareful,
thecartesian
coordinate
systemreference
position
dataiscleared
if the
position
numberisomittedor 0 (zero)
isdefined,
except
whenbit4 of sw1 located
insidethe side door of the drive unit is in the lower position(OFF).
(See CHAPTER
4 CARTESIAN
COORDINATE
SYSTEMREFERENCE
POS|T|ON
SETTING,
APPENDIX.)
ISampleProgram
I
10 LPRINT
"MO 10" ; Moveto position
10.
20 LPRINT
"MO 12" ; Moveto position
12.
30 LPRINT
"MO 15" ; Moveto position
15.
40 LPRINT
"PC 12" ; Clearposition
12.
50 LPRINT
"DP"
; Ivloveto position10.](https://image.slidesharecdn.com/movemasterrobot-210420203455/75/Movemaster-robot-100-2048.jpg)
![3. DESCRIPTION
OFTHECOMMANDS
PDX (PositionDefine)
IFunction
I
Defines
the coordinates
(position
andangle)
of a specified
position
number.
IlnputFormat)
PD (Position
number), [ (X-axis
coordinate)
], [ (Y-axis
coordinate)
], [ (Z-axis
coordinate)
l, { (Pitchangle)l, [<Roll angle)]
Where,1 S Positionnumber S 629
(sample Inputl
PD 10,0, 380,300 -70, -40
IExplanation
I
(1) Theleastinputincrement
of thecoordinates
is 0.1mmor 0.1'.(e.g.specify
20.1for
20.1mm.)
(2) No erroroccurs
evenwhenthedefined
coordinates
exceed
the robot'soperational
space.
Thisallowsyouto definea position
representing
an incremental
movement
when the command is used in combinationwith the other command.(See
commandSF. MA)
(3) The defaultcoordinate
is 0.
(4) The open/close
stateof the hand is definedby the grip flag command.(See
commandGF.)
(5) Thiscommand
candefinea robotposition
onlywhenthecoordinates
of theendof
the handas deterrnined
by the tool commandare located
aheadZ-axis(i.e.,
the
directionthe robot faces).
(samplePrograml
1OO
LPRINT
"GF 1"
110 LPRTNT
"PD 10,0, 380,300,-70, -40"
120 LPRTNT
"PD 20, O,0, 20, A, O"
130LPRINT
"SF 10,20"
140LPRINT
"MO 10"
X Intheaboveexample,
linenumber110defines
position
10,atwhichhandisclosed,
whilelinenumber120defines
position
20.Linenumber130thenredefines
position
10as position10beingshifted20mmin Z-axis
as determined
by position
20.Line
number140 movesthe robotto the new position10.](https://image.slidesharecdn.com/movemasterrobot-210420203455/75/Movemaster-robot-101-2048.jpg)


![3. DESCRIPTION
OFTHECOMMANDS
SP (Speed)
(Functionl
Setsthe operating
velocityand acceleratio
n/deceleration
time for the robot.
(lnput Format)
SP (Speedlevel), [ (H or L) ]
Where,0 < Speedlevel 5 9
ISampleInputl
S P 7 , H
IExplanation
)
(1) Thiscommandsetsthe operating
velocityandthe acceleration/deceleration
time
upon startingand stopping.The velocityis variablein 10 steps,9 being the
maximum speedand 0 the minimum.Acceleration/deceleration
time may be
selected
from amongH or L.Theacceleration
time is 0.35seconds
for H and 0.5
seconds
for L,whiledeceleration
time is 0.4seconds
for H and0.6seconds
for L.
WhenH isselected,
theacceleration
anddeceleration
areconstant
fromSP0to SPg.
WhenL is selected.
theacceleration
anddeceleration
timesareconstant
from SP0
to SPg.
When two or more axes of motion are involved,this command setsthe operating
velocity of the joint having the greatest number of motor pulses.
When the velocityand acceleration/deceleration
time are set,the acceleration
and
deceleration
distancerequiredfor movementis predetermined.
This meansthatthe
set speed may not be reached if the distanceof travel is small.
(4) Errormode I may be causedif a high speedand H time aresetto effecta backward
motion or when the robot's load capacityis large.ln such cases,set a low speed
and L time.
(5) A speed and acceleration/deceleration
time, once set, remainvalid until new ones
are set. In the initial condition, setting is
"SP
4, L". (The last acceleratior't/
decelerationtime remains valid when it is omitted.)
(6) lf the speed parameter is omitted, it defaultsto 0.
(21
(3)
Isample Program
I
1OLPRINT
"SP 3"
20 LPRINT
"MO 10"
30 LPRINT
"SP 6, L"
40 LPRINT
"MO 12"
50 LPRINT
"MO 15"
Set speed at 3.
Move to position '10.
Set speed at 6 and time
Move to position 12.
Move to position 15.](https://image.slidesharecdn.com/movemasterrobot-210420203455/75/Movemaster-robot-109-2048.jpg)
![3. DESCRIPTION
OFTHECOMMANDS
Tl (Timer)
IFunction
)
Haltsthe motionfor a specified
periodof time.
IInput FormatI
Tl (Timercounter)
Where,0 S Timer counter5 32767
ISampleInputl
rt 20
IExplanation
]
(1) Thiscommandcauses
therobotto haltitsmotionfor thefollowingperiodof time:
specified
timer countervalue X 0.1 seconds(max.3,276.7
seconds).
(2) Thecommandcanbe usedto introduce
a time delaybeforeandafterthe handrs
openedand closedfor grippinga workpiece.
{3) The default value is 0.
Isample Program
I
10 LPRINT
"MO 1, O"
20 LPRINT
"TI 5"
30 LPRINT
"GC"
40 LPRINT
"TI 5"
50 LPRINT
"MO 2, C"
Move to position1 (with hand open).
Set timer at 0.5 sec.
Closehand (to grip workpiece).
Set timer at 0.5 sec.
Move to position2 (with hand closed).](https://image.slidesharecdn.com/movemasterrobot-210420203455/75/Movemaster-robot-110-2048.jpg)
![3. DESCRIPTION
OFTHECOMMANDS
TL (Tool)
IFunction
I
Establishes
the distancebetweenthe hand mounting surfaceand the end of the hand.
Ilnput Formatl
TL [ (Tool length)]
Where.
0 5 Toollength< *300.0(mm)
Isamplelnputl
TL 145
IExplanation
)
{'1
) The leastinput incrementof the tool lengthis 0.1mm.(e.g.specify200.5for
200.5m
m.)
{2) Thetool length,
onceestablished,
remains
validuntila newoneis defined.
Whena
tool lengthis changed,
the currentpositionis alsochangedaccordingly,
which,
however,
doesnot involveany roboticmotion.(lnitial
settingof thetool lengthis
'l07mm.)
(3) The defaultvalue is 0.
{4) Sincethe pointdefined
by thiscommandisthe basis
for calculation
of thecurrent
position,cartesian
jogging,and commandsinvolvingthe cartesian
coordinate
system,
the accurate
tool lengthmustbe established
according
to thetool (hand)
being used.
(5) Whenevera programis to run, be sure to set the same tool length as that
established
duringteachingat the beginningof the program.
Isample Program
)
1OLPRINT
"TL 120"
20 LPRINT
"HE 1"
30 LPRINT
"TL 1OO"
40 LPRINT
"MO 1"
X Intheaboveexample,
linenumber30changes
thetoollengthandthenlinenumber
40 causesthe end of the hand to advance20mm in the tool direction.](https://image.slidesharecdn.com/movemasterrobot-210420203455/75/Movemaster-robot-111-2048.jpg)
![3, DESCRIPTION
OFTHECOMMANDS
DC (Decrement
Counter)
lFunctionl
Subtracts
l from the value in a specified
counter.
nput Formatl
DC (Counter
number)
W h e r e ,
1 5 C o u n t e r
n u m b e r5 9 9
[SampleInput]
DC 35
IExplanation]
(1) Errormode II is causedif the countervalue becomeslessthan -32767.
(2) Thecommandcanbe usedto countthe numberof workpieces
andjob sequences
and to set the numberof grid pointsin the pallet.
(3) The contentsof the counter can be changed,compared,or read by the
counter-related
instructions.
(SeecommandsSC,lC, CP,and CR.)
[SampleProgram]
10 LPRINT
"SC 21, 15"
20 LPRINT
"DC 21"
X Intheabove
example,
linenumber
10sets
value15incounter
21andlinenumber
20
causesthe counterto be decremented
by 1.](https://image.slidesharecdn.com/movemasterrobot-210420203455/75/Movemaster-robot-114-2048.jpg)

![3. DESCRIPTION
OFTHECOMMANDS
ED (End)
IFunction)
Endsthe program.
Ilnput Format]
ISampleInputl
E D
IExplanation
I
(1) Thiscommandmarksthe end of a program.
(2) lt is required
at the endof a programunless
the programcommands
aredirectly
executed
from the personal
computer.
{Thecommandis not required,
however,
whenthe programformsa closedloop.)
Isample Program)
10 LPRINT
"1OO
SP 3"
2 0 L P R T N T
" 1 1 0M O 3 "
30 LPRINT
"120MO 5"
40 LPRINT
" 130ED"
' qar cnaa.l .t ?
; Move to position3.
; Move to position5.
; End the program.
ED](https://image.slidesharecdn.com/movemasterrobot-210420203455/75/Movemaster-robot-118-2048.jpg)
![3. DESCRIPTION
OFTHECOMMANDS
GT (Go To)
IFunctionl
Permits
the program
sequence
to jumpto a specified
linenumber
unconditiona
lry.
IlnputFormat]
GT (Linenumber)
Where,15 Linenumber= 2048
Isample Inputl
Gr 1024
IExplanation
I
(1) Thiscommandcauses
the programsequence
to jump to a specified
linenumber.
(2) lf the specified
line numberis not available,
the first line numberfollowingthe
specified
one is executed.
Isample Program
I
10 LPRINT
"20 MO 1"
20 LPRINT
"30 GT 1OO"
200LPRTNT
"100MO 12"
2 r 0 L P R T N T
" 1 1 0M O 1 5
l4ove
to position1.
Jump to line number100uncond
itionally,
Move to position12.
Move to position15.](https://image.slidesharecdn.com/movemasterrobot-210420203455/75/Movemaster-robot-121-2048.jpg)
![3, DESCRIPTION
OFTHECOMMANDS
RC (RepeatCycle)
ISampleProgram)
1 0 L P R I N T
" 2 0 M O 1 "
20 LPRINT
"30 RC3"
30 LPRINT
"40 MO 2"
40 LPRINT
"50 MO 3"
50 LPRINT
"60 MO 4"
60 LPRINT
"70 NX"
70 LPRINT
"80 MO 5"
IFunctionl
Repeatsthe loop specified by the command NX a specifiednumber of times.
Ilnput Fo]matl
RC 'No. of repeated
cycles)
Where,
'l
5 No, of repeatedcycles < 32767
Isample Input)
RC 32
IExplanation
)
(1) Thiscommand,used
incombination
withtheNXcommand,
causes
a loopspecified
bytheNXcommand
to beexecuted
a specif
iednumberoftimesandcauses
theline
numberfollowingNX to be subsequently
executed.
(2) To incorporate
anotherloop(between
RCand NX)intotheexisting
loop(between
RC and NX) is called"nesting."Up to 9 nestinglevelsare possible.
Move to position 1.
Repeat loop delimited by
NX three times.
Move to position 2. )
^ l
rvrove
ro posrronJ. i Loop
Move to position4. l
Delimit
the loop.
Move to position5.](https://image.slidesharecdn.com/movemasterrobot-210420203455/75/Movemaster-robot-127-2048.jpg)
![3, DESCRIPTION
OFTHECOMMANDS
RNX (Run)
(Function
I
Executes
a specified
partof instructions
in a program.
(lnputFormat)
RN | (Starting
linenumber)1[, <Ending
line number)]
Where,1 5 Starting/ending
line number5 2048
Isample Inputl
RN 20, 300
IExplanation
)
(1) Thiscommandcauses
the programto run starting
with a specified
startingline
numberand endingwith the line numberone aheada specified
endingline
number.
(2) lf the programis to continue,restartwith the endingline number.
(3) lf the teaching
box is connected,
the linenumberbeingexecuted
is shownon its
LEDdisplay.
lf an endinglinenumberis specified,
theprogramstopswiththatline
numbershownon the LED.
(4) lf thestarting
linenumberis omitted,
theprogram
starts
withthefirstlinenumber.
ISampleProgram)
10 LPRTNT
"100 MO 10"
20 LPRINT
"110 MO 12"
30 LPRINT
"120 GC"
40 LPRINT
"130 MO 17"
50 LPRINT
" 140 ED"
60 LPRINT
"RN 100" ; Runthe programstarting
with linenumber100.](https://image.slidesharecdn.com/movemasterrobot-210420203455/75/Movemaster-robot-128-2048.jpg)

![3. DESCRIPTION
OFTHECOMMANDS
SC (Set Counter)
IFunction
)
Loadsa specified
value in a specified
counter.
Ilnput Formatl
SC (Counternumber), [ (Value)]
Where,15 Counter
number< 99
-32767 < Value{decimal)
< +32767
or &80015 Value(hexadecimal)
< &7FFF
Isample Inputl
sc 15,123
(Explanation
I
11)All countersare initiallyset to 0.
(2) Thecommandcanbe usedto countthe numberof workpieces
andjob sequences
and to set the numberof grid pointsin the pallet.
(3) The defaultvalue is 0.
(4) The contentsof the counter can be changed,compared,or read by the
counter-related
instructions.
(SeecommandslC, DC,CP,and CR.)
(5) Thevalueloadedin the counteris not changed
by the commandRS,NW,or ED.
Isample Program
I
1OLPRINT
"SC 21, 15"
20 LPRINT
"IC 21"
X lntheabove
example,
linenumber
10sets
value15incounter
21andlinenumber
20
causesthe counterto be incremented
by 1.](https://image.slidesharecdn.com/movemasterrobot-210420203455/75/Movemaster-robot-130-2048.jpg)
![3. DESCRIPTION
OFTHECOMMANDS
SM (lf Smaller)
IFunction
I
Causes
a jumpto occurif the contents
of the internal
register
aresmaller
thana
specified
valuewhencompa
red.
IlnputFormat]
SM (Comparedvalue) (Jumpinglinenumber)
Where,-3Z161 5 Compared
value (decimal)
< +32767
or &80015 Compared
value (hexadecimal)
< &7FFF
1 < Jumpinglinenumber5 2048
Isample Input)
SM 128,1024;or SM &80, 1024
(Explanation
I
(1) Thiscommand
causes
a jumpto occurconditionally
by meansof an external
inpur
dataor the contentsof the internalreqister.
{2) lf the contents
of the internal
comparison
register
is smallerthanthe compared
value(i.e.,when the conditionis met),the programjumpsto the specified
line
number;otherwise
(i.e.,
whenthe condition
is not met),the programcontinues
in
seq
uence.
(3) A valuecanbe loadedintothe internal
comparison
register
by executing
the input
instruction
(seelD and lN)for an external
inputdataor by executing
the compare
counterinstruction
(see
CP)
forthecounterdata.lt istherefore
necessa
ryto execute
previously
eitherof thesecommandsso that a conditional
iumo can occur.
(4) The comparedvaluemay be definedeitherin decimalor hexadecimal.
When a
hexadecimal
numberis used,be sureto append"&" at the beginningof the
number.
Isample Program)
1OLPRINT
" 1OO
ID"
20 LPRTNT
"110SM 100,130"
30 LPRINT
"120 ED"
40 LPRINT
" 130MO 7"
Fetchdatafrom externalinput port.
Jump to linenumber130if the inputdatais
smaller
than 100.
Endthe programif abovecondition
is not met.
Move to position7.](https://image.slidesharecdn.com/movemasterrobot-210420203455/75/Movemaster-robot-131-2048.jpg)
![3. DESCRIPTION
OFTHECOMMANDS
GF (GripFlag)
lFunction
)
Defines
the open/close
stateof the grip of the hand (usedin conjunction
with the
commandPD).
(lnput Format)
GF (Switch)
Where,switch:0 or 1
ISampleInputl
L]T I
I Explanation
I
(1) Thiscommanddefines
theopenor closestateofthe handgripusedin conjunction
with the commandPD which definesthe coordinates
of a specified
position
(2) Thegripstateis openwhentheswitchis setto 0 andclosed
whenthe switchis 1.
The switchis set to 0 (grip opened)when power is turnedON.
(3) The switchsetting,once made,remainsvalid until it is newly set.
(sample Program)
See commandPD.](https://image.slidesharecdn.com/movemasterrobot-210420203455/75/Movemaster-robot-133-2048.jpg)
![3. DESCRIPTION
OFTHECOMMANDS
GO (Grip Open)
IFunction)
Opensthe grip of the hand.
Ilnput Format)
IsampleInput)
GO
IExplanation
]
(1) Motor-operatedhand:
The command causesthe grip of the hand to be opened by the gripping force
waveform defined by the command Gp.
,,Retained
gripping force,.is only valld
among the command Gp parametersif the command Go is used re'eatedrv.
(2) Pneumatically-operatedhand:
The command causesthe sorenoidvarveto be energizedto open the hand (or to
releasethe workpiece.)
(3) A certain period of time is required before the motion of the robot becomes
stabilized
as its hand opensto release
the workpiece.
This may makeit necessary
to
introducea time delay using the command l beforeand afterthis command.The
executiontime of this command is determinedby the parameter,,starting
gripping
force retentiontime" for the Gp command. (See command Gp.)
(sample Programl
10 LPRINT
"100 MO 10,C"
20 LPRTNT
"110Tt 5"
30 LPRINT
",120GO"
40 LPRTNT
"130Tt 5"
50 LPRTNT
"140MO 15,O"
Move to position10 (with hand closed).
Set 0.5-sec.
timer.
Open hand (to release
workpiece).
Set 0.s-sec.
timer.
Move to position15 (with hand open).](https://image.slidesharecdn.com/movemasterrobot-210420203455/75/Movemaster-robot-134-2048.jpg)
![3. DESCRIPTION
OF
GP (Grip Pressure)
(Function
I
Defines
the grippingforceto be applied
whenthe motor-operated
handis closeoand
opened.
(lnput Formatl
GP (Starting
gripping
force retentiontime)
force) (Retainedgripping force) (Starting
gripping
Where, Starting/retained
Startinggripping
Stading gripping
force
Close
Isample Program)
1 0 L P R I N T
" G P
1 0 , 6 , 1 0 "
20 LPRINT
"GC"
gripping
force5 15
force retention
time < 99
Startinggripping
retentron time
0 <
0 <
Retained
force
gflpping
Time
Grippingforce
Open
ISampleInput]
G P 1 5 .7 . 5
IExplanation
]
(1) Thiscommandsetsthe grippingforceof the motor-operated
hand(option)as it
changes
with time.(Seecommands
GO and GC.)
(2) Thestartingand retained
grippingforcesare 15at theirmaximumand 0 at their
minimum.
Thestarting
gripping
forceretention
timeistheparameter
X0.1seconos
(max.9.9seconds).
Define
the parameters
optimumfor theworkpiece
to be heto.
The parameter
setting,once made,remainsvalid until a new settingis made.
(3) The initialsettings
whenthe poweris turnedON are ,,Gp10,10,3."
(4) Parameters,
starting
andretained
gripping
forces,
areinvalid
forthepneumatically-
operatedhand.
(5) The robot motion stopsduringthe startinggrippingforce retention
time.
; Set grip pressu
re.
; Closehand in abovesettings.](https://image.slidesharecdn.com/movemasterrobot-210420203455/75/Movemaster-robot-135-2048.jpg)

![3. DESCRIPTION
OFTHECOMMANDS
OD (Output Direct)
IFunction
I
Outputs
specified
dataunconditionally
through
the outputport.
IlnputFo]matl
OD (Outputdata)
Where, 0 (-327671 5 Output data (decimal)< 255 l+32767l.
&0 {&8001)S Outputdata (hexadecimal)
< &FF (&7FFF)
Figurein ( ) is for type A16 or 816 l/O card.
lsample Inputl
o D 7
I Explanation
)
(1) Thiscommand
causes
a signal(parallel
data)to beoutputunconditionally
through
theoutputportto external
equipment
suchasa programmable
controller.
Thedata
outputto externalequipmentis retained.
(2) The outputdatais definedeitherin decimalor hexadecimal.
Fordatadefinedrn
hexadecimal,
be sureto append"&" at the beginning.
(3) For detaileddescriptionof connections,
see CHAPTER
3 INTERFACE
WITH
EXTERNAL
YO EOUIPMENT,
APPENDIX,
(SamplePrograml
10 LPRINT
"OD &FF" ; Setall external
outputport bits (8 bits)to ON.](https://image.slidesharecdn.com/movemasterrobot-210420203455/75/Movemaster-robot-139-2048.jpg)
![3. DESCRIPTION
OFTHECOMMANDS
OT (Output)
IFunction
I
Outputs
specified
data
synchronously
through
theoutput
port(using
thecontrol
signal
lines).
IlnputFormatl
OT (Outputdata)
Where, 0 l-32767]. < Output data (decimal)< 255 (+327671
&0 (&8001)< Outputdata thexadecimal)
< &FF (&7FFF)
Figurein ( )is for type416 or 816 l/O card.
DATA (OUT}
nov(our)
A C K( r N )
DATA(OUT)
RDY(OUT)
nCrlrr.r
t
Type 48, 416 l/O
Type88,816 l/O
ISampte
tnput)
o r 7
IExplanation
I
(1) Thiscommandcauses
a signal(parallel
data)to be outputsynchronously
through
the outputportto external
equipment
suchas a programmable
controller.
At this
time,thecontrolsignallines(RDY
andACKsignals
or RDYandACKsignals)
must
be previously
connected
to the external
equipment.
The dataoutputto external
equipmentis reta
ined.
(2) The outputdatais definedeitherin decimalor hexadecimal.
Fordatadefinedin
hexadecimal,
be sureto append"&" at the beginning.
(3) For detaileddescriptionof connections,
see CHAPTER
3 INTERFACE
WITH
EXTERNAL
YO EOUIPMENT.
APPENDIX.
ISamptePrograml
10 LPRINT
"OT &FF" ; Set all external
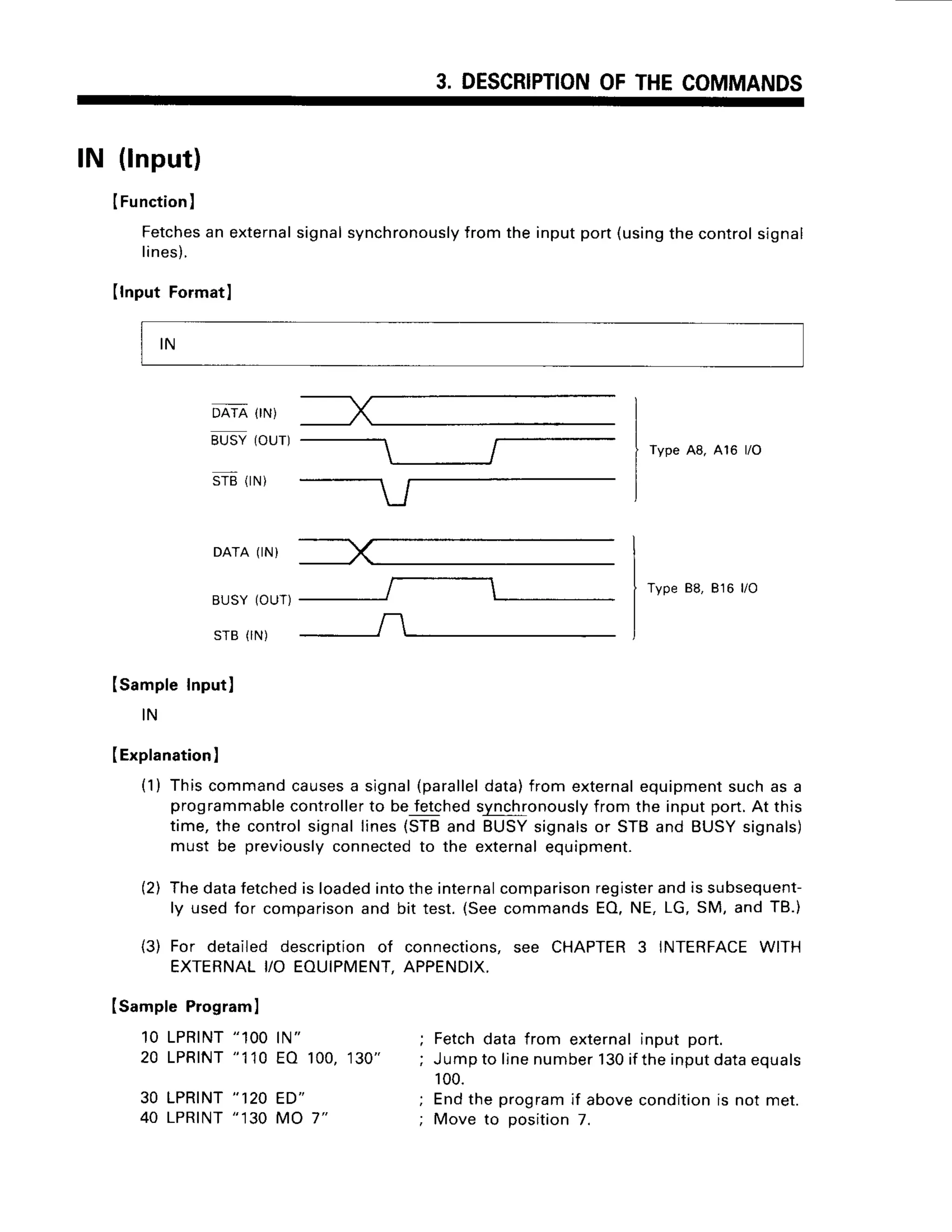
outputport bits (8 bits)to ON.](https://image.slidesharecdn.com/movemasterrobot-210420203455/75/Movemaster-robot-140-2048.jpg)

![3. DESCRIPTION
OFTHECOMMANDS
DR (DataRead)
IFunction
)
Readsthe contentsof the
(lnput Format)
internalregister(usingRS232C).
Isampte Inputl
DR
IExplanation
I
(1) Thiscommandcauses
the contents
of the internalregister
to be outputfrom the
RS232C
port.lf executed
followingan inputinstruction,
the commandallowsthe
data of the externalinput port to be readfrom the RS232C
port.
(2) TheoutputformatisASCII
codehexadecimal
numbers
appended
with "&H" atthe
beginning.
(3) Theterminator
of outputdatais carriage
return(CR,Hex.0D).lf the datais to be
received
by a personal
computer,
therefore,
it is necessary
to handle
theentiredata
stream
upto hex.0D.TheBASIC
equivalent
to thisistheLINEINPUT+ statement.
Isample Program)
1 0 O P E N" C O M ' ]: 9 6 0 0 ,
E , 7 , 2 " A S # 1
2 0 P R T N T
f 1 , " t D "
30 PRINTf1, "DR"
40 LINEINPUT#
1, A$
50 PRINT"INPUTDATA : "
; A$
60 END
R U NI
INPUTDATA : &HFF
X In the aboveexample,
in which Mitsubishi
MULTll6is employed,
linenumber10
opensthe RS232C
communication
file and line number20 loadsthe dataof the
inputportintotheinternal
register
usingthedirectinputcommandlD.Linenumber
30 then transmitsthe commandDR.Linenumber40 next usesthe LINEINPUT
statement
to storethe received
datain A$ andlinenumber50outputs
thecontents
of the datato the displayscreen.
DR](https://image.slidesharecdn.com/movemasterrobot-210420203455/75/Movemaster-robot-143-2048.jpg)

![3. DESCRIPTION
OFTHECOMMANDS
WH (Where)
IFunction
I
Reads the coordinatesof the
IInputFo]matl
(SampleInput)
WH
IExplanation
)
(1) Thiscommandcausesthe coordinates
hand,as determined
by thetool length
be outputfrom the RS232C
port.
currentposition(usingRS232C).
of the currentpositionof the end of the
currently
established
(bycommandTL),to
The data is output using the ASCIIcode as shown below.The leastoutput
increment
is 0.1mmor 0.1'.
Outputformat:X-axis
coordinate,
Y-axis
coordinate,
Z-axis
coordinate,
pitchangle,
roll angle0D (Hex.)
The delimiterof the datais a comma(,: Hex.2C)andthe terminatoris carriage
return(CR,
Hex.0D).lf thedataisto bereceived
by a personal
computer,
therefore,
it is necessary
to handle
theentiredatastream
upto hex.0D.TheBASIC
equivalent
to this is the LINEINPUT# statement.
ISampleProgram
I
10 OPEN"COM1: 9600,E, 7,2" AS#1
2 0 P R I N T # 1 ,
" W H "
3 0 L I N EI N P U T # 1 ,
A S
40 PRINT
"CURRENT
POSITION
:" ; A$
50 END
R U NI
cURRENT
POS|T|ON
: +10.0, +380.0,+300.0,-70.0, -40.0
X In the aboveexample,
in which Mitsubishi
MULTll6is employed,
linenumber10
opensthe RS232C
communication
fileandlinenumber20transmits
thecommand
WH. Linenumber30 thenusesthe LINEINPUT# statement
to storethe received
datainA$ andlinenumber
40outputs
thecontents
ofthedatato thedisplav
screen.
12)
(3)
WH](https://image.slidesharecdn.com/movemasterrobot-210420203455/75/Movemaster-robot-148-2048.jpg)
![3. DESCRIPTION
OFTHECOMMANDS
TRX (Transfer)
(Function
I
Transfers
the
Ilnput Formatl
programand positiondatastoredin EPROM
to the drive unit RAM.
ISampleInputl
TR
IExplanation
I
(1) Thiscommand
causes
thecontents
ofthe EPROM
installed
intheusersocket
inside
thedriveunitsidedoorto betransferred
to theRAM.Oncethecommandhasbeen
executed,
the old programand positiondatastoredin RAM are all cleared.
(2) Thecommandexecution
indicator
LEDlEXECUTE)
lightsup instantaneously
when
the data is beingtransferred.
(3) Whenbit 4 of SW1located
insidethe driveunitsidedoor is in the upperposition
(ON),
thecommand
alsocauses
thecartesian
coordinate
systemreference
position
datain EPROM
to be readintoRAM.Thistransfer
of datadoesnottakeplace
when
bit 4 is in the lowerposition(OFF)
and the positiondatain RAM remainsvalid.
ISampleProgram]
1OLPRINT
"TR"
TR](https://image.slidesharecdn.com/movemasterrobot-210420203455/75/Movemaster-robot-150-2048.jpg)
![3. DESCRIPTION
OFTHECOMMANDS
WRX (Write)
IFunction
]
Writesthe generated
programand positiondata into EPROM.
(lnput Formatl
(sample Input)
WR
(Explanation
I
(1) Thiscommandcauses
the programand positiondatagenerated
in the driveunit
RAMto bewrittenintotheEPROM
installed
inthe usersocket
inside
thedriveunrr
side door. The destination
EPROMmust have previouslybeen erasedbefore
executing
the command.
(2) Whilethe datais beingwrittenintothe EPROM,
thecommandexecution
indicator
LED{EXECUTE)
onthedriveunitfrontpanelstayslit.lt goesoutassoonasalldata
has beenwritten (whichtakesabout 100seconds).
(3) ErrormodeII iscaused
if theEPROM
hasnotbeenerased
or a writeerroroccurs.
(sample Programl
1OLPRINT
"WR"
WR](https://image.slidesharecdn.com/movemasterrobot-210420203455/75/Movemaster-robot-151-2048.jpg)
![3. DESCRIPTION
OFTHECOMMANDS
' (Gomment)
IFunction
I
Allowsthe programmer
to writea comment.
IlnputFormat)
'
lstring of information
consisting
of up to 7 alphanumeric
characters]
Isample Input)
, MELCO
IExplanation
I
(1) Thiscommandallowsthe programmer
to writea commentconsisting
of up to 7
alphanumeric
characters
followingthe ' (apostrophe).
(2) Usethiscommand
to writethenameanddateonthegenerated
program
or to mark
a subroutine.
Commentsare helpfulin laterunderstanding
the programas the
commandLR is used.
(3) The systemignorescommentsas it processes
its instructions.
{4) lf the numberof characters
exceeds
7, the whole excessis ignored.
(sample Programl
1OLPRINT
"1 'DATE"
20 LPRINT
"2 'a70821"
30 LPRINT
"3 NT"
40 LPRINT
"4 MO 1"
X Inthe aboveexample,
linenumbers1 and2 writethe datewhenthe programwas
written(21 August 1987).](https://image.slidesharecdn.com/movemasterrobot-210420203455/75/Movemaster-robot-152-2048.jpg)
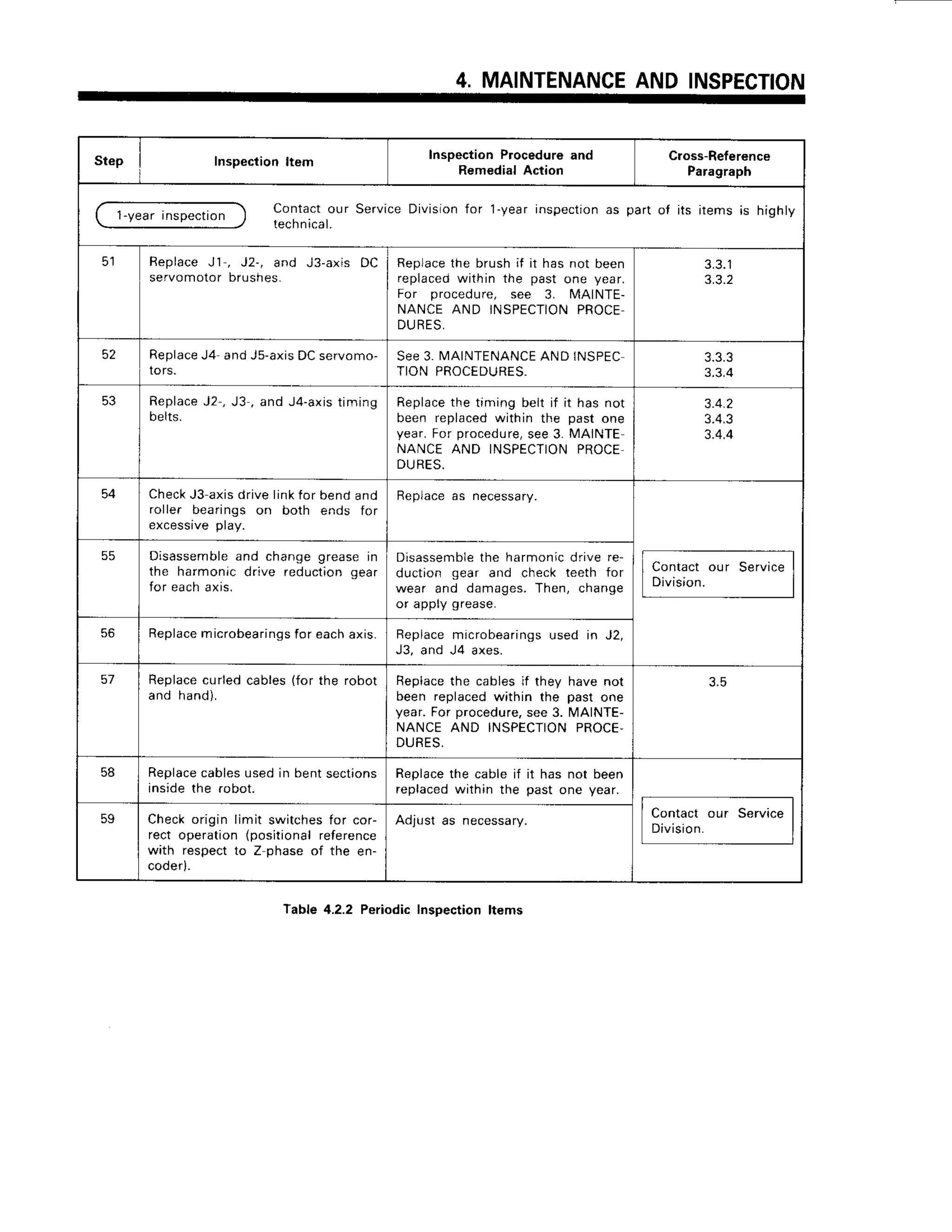
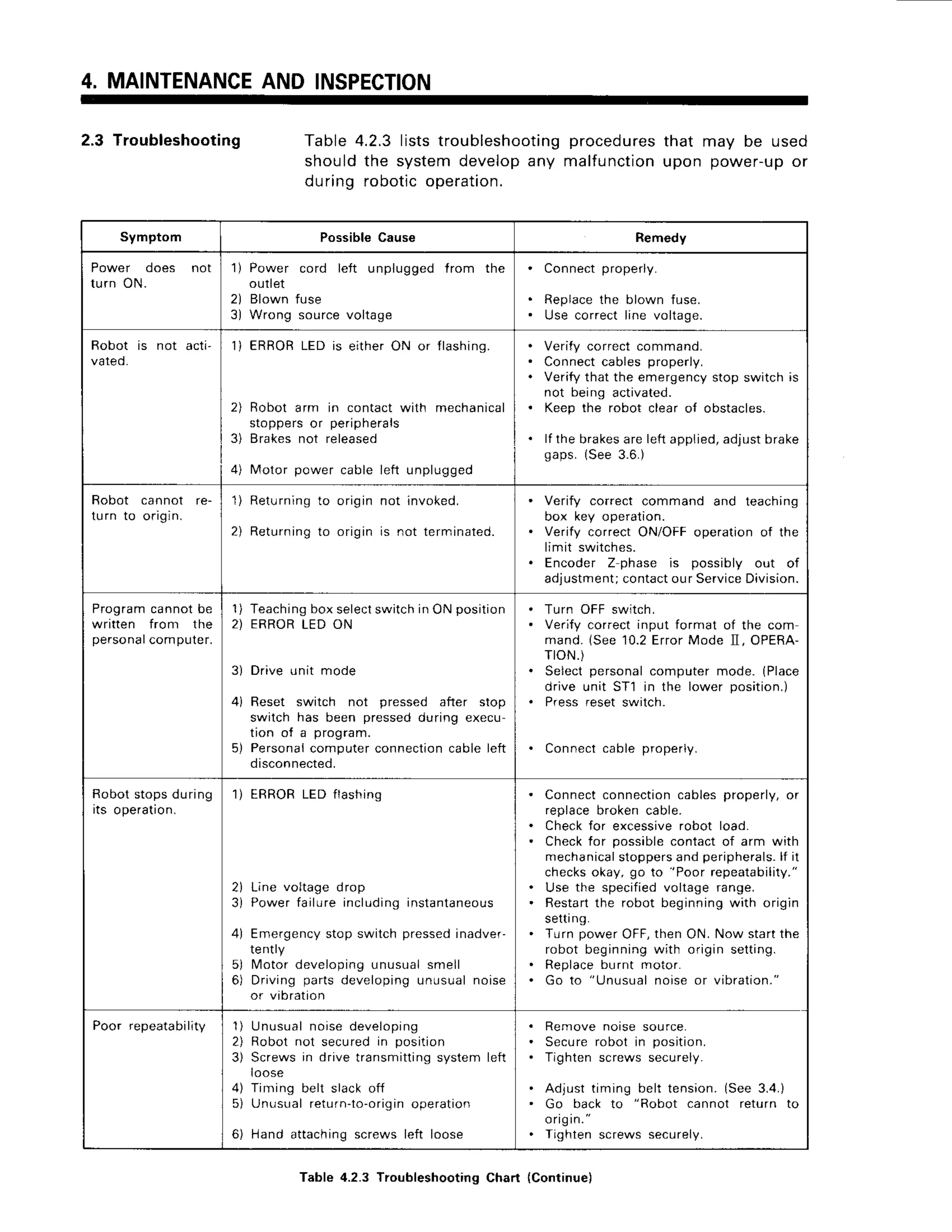
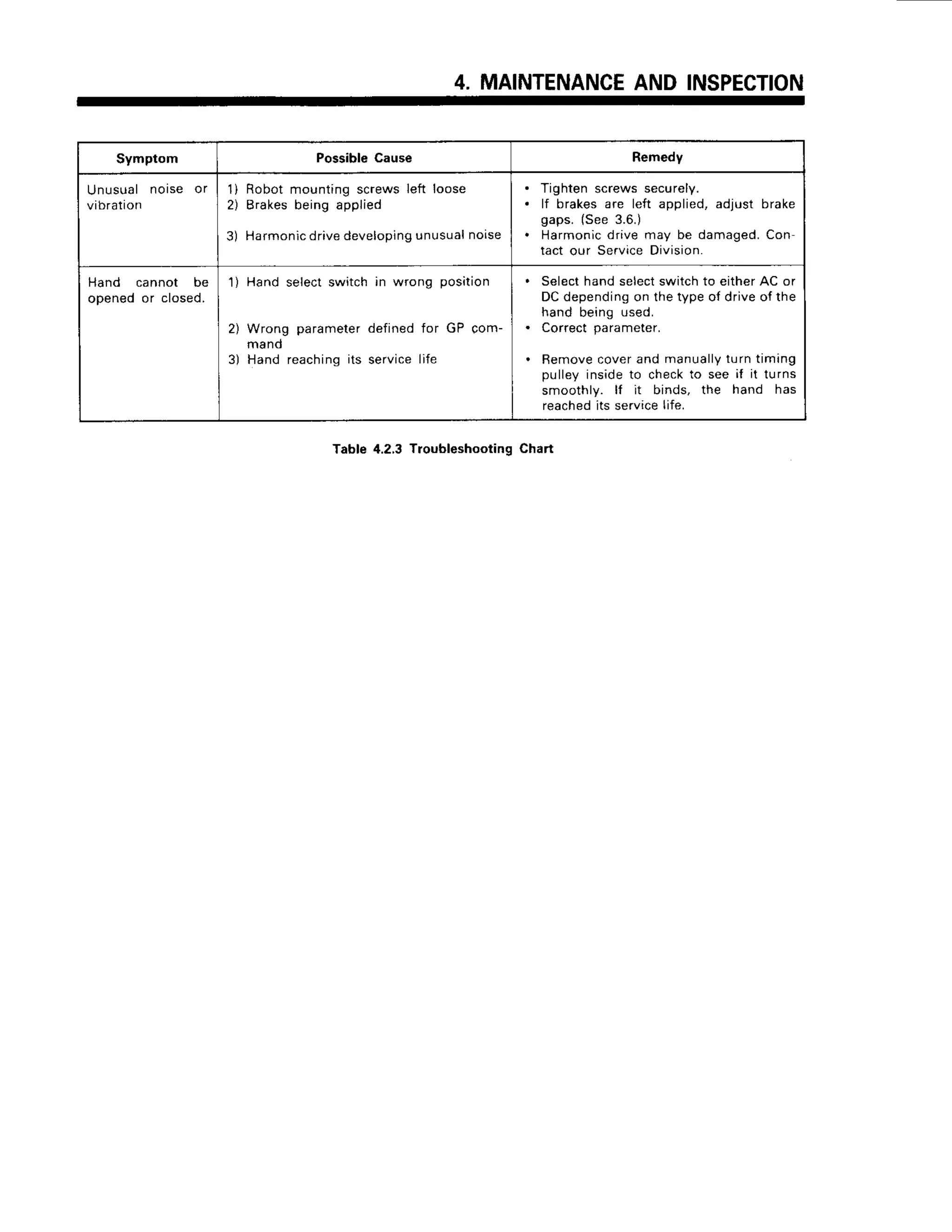
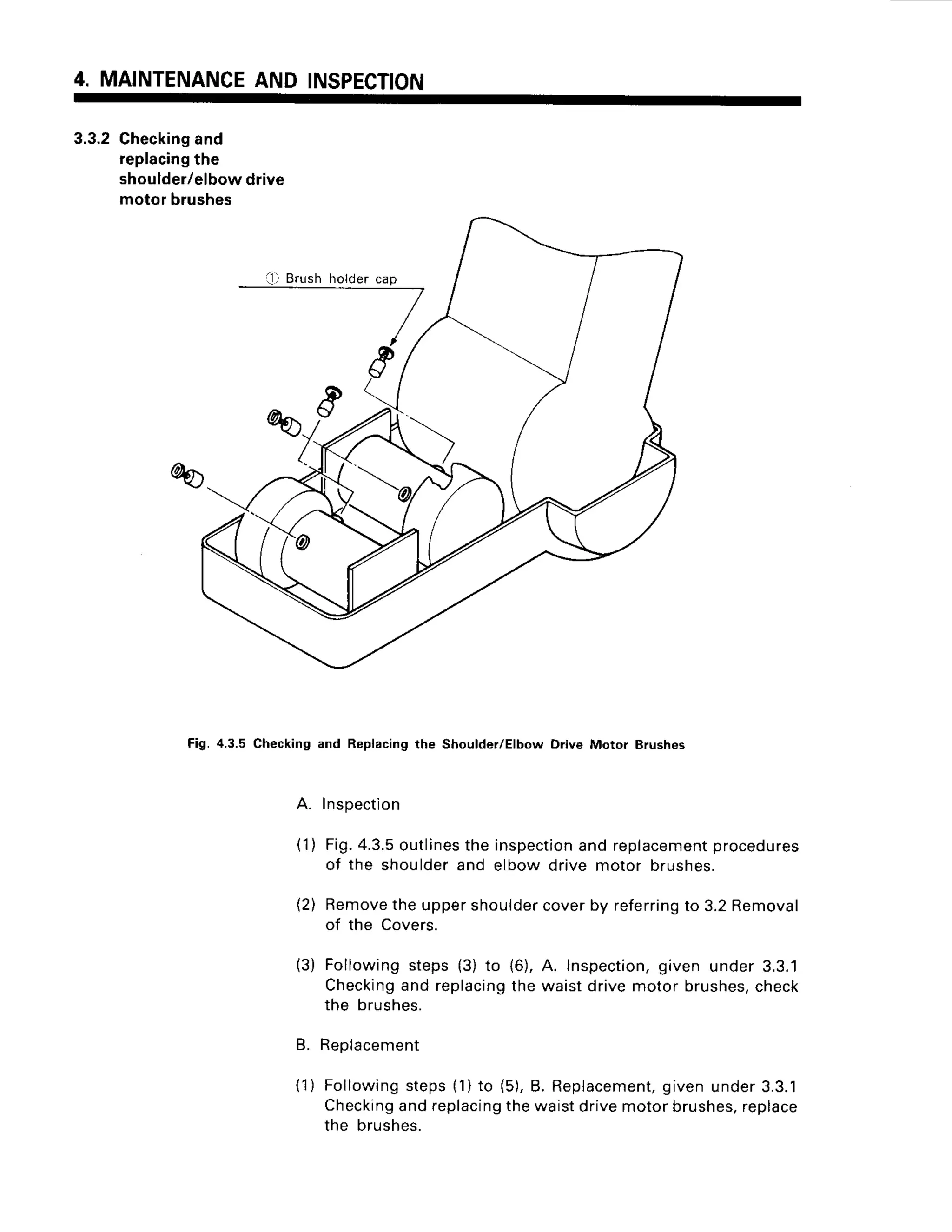
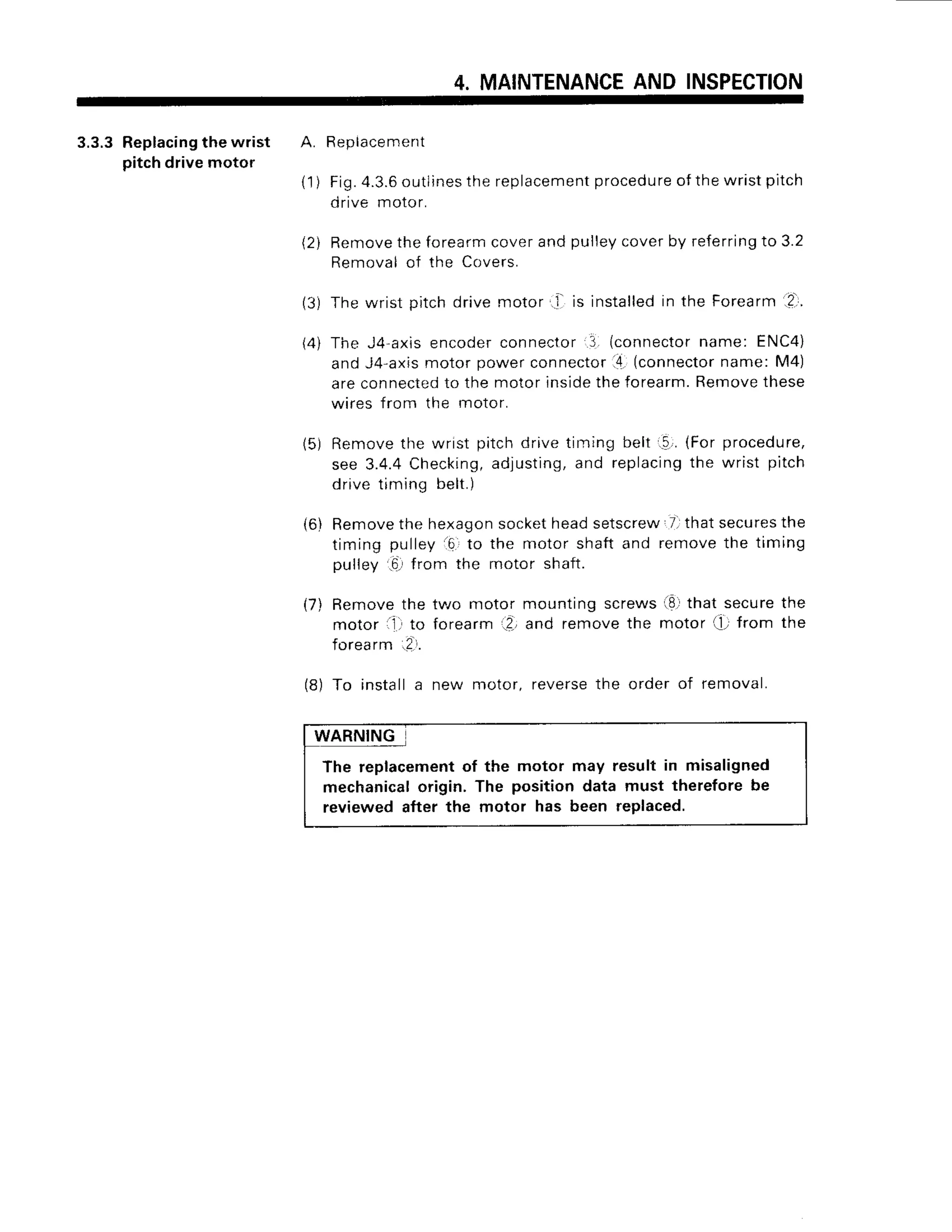
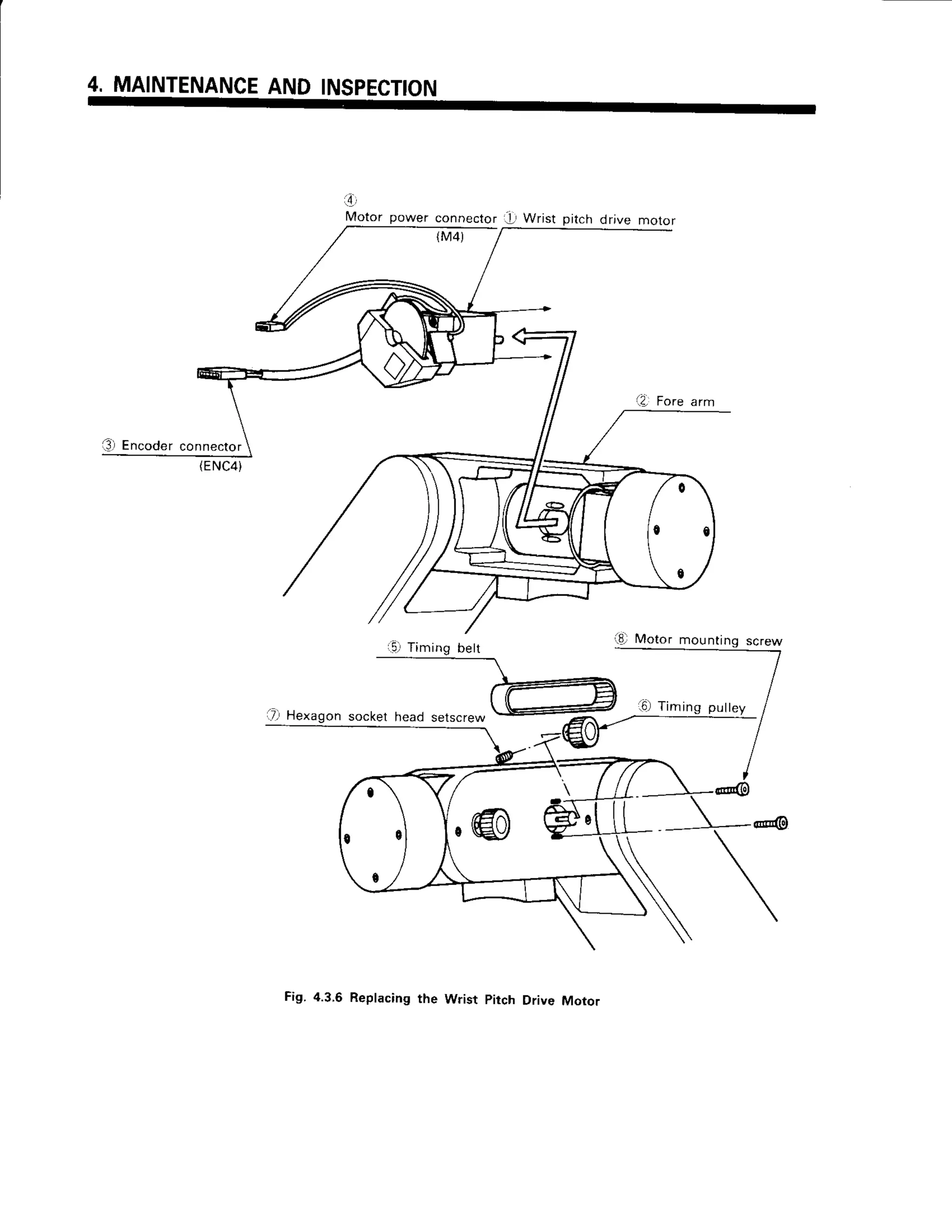
![4. MAINTENANCE
AND INSPECTION
2.2 Periodic
lnspection Table4.2.2liststhe inspection
items and procedures
aI each
nspectionfrequency.Part of the inspectionand adjustment
procedures
aswellas partsreplacement
procedures
is detailed
in
]. MAINTENANCE
AND INSPECTION
PROCEDURES.
Step Inspectionltem
Inspection Proceduie and
Remedial Action
cross-Reference
Paragraph
1-monthinspection
1 Checklo see if hand rnountingbolts
are left loose.
Use a wrench to checkfor looseness
and retighten as necessary.
2. Check bolts and screws, both visible
and invisible,for looseness.
Use a wrench and screwdriver to
checkfor loosenessand retighten as
necessary.
3. J Checkcablesfor scratches,
damages,I lsolateand eliminatethe cause.
and contaminants.
lExternal
and in- Replace
thecable
ifexcessivelY
dam
ternalexposed
cables). aged.
3.5
Contact our service
Division for replace-
ment of cables other
than the curledcable.
3-monthinspectaon
'11 Checktiming belt for each axis (J2,
J3, and J4). Check teeth for wear.
Checkand adjustaccording
to the
procedures
given in 3. MAINTE-
NANCEAND INSPECTION
PROCE'
DURES.
lfteethareexcessively
worn,replace
with a new belt.
3.4.3
3.4.4
12 CheckJ2- and J3 axis brake linings
for correct gap. Check also for wear
and foreign matter trapped.
Check and adjust according to th€
procedures given in 3. IMAINTE-
NANCE AND INSPECTIONPROCE-
DURES.
Replace
the brakeliningif excessive-
ly damaged.
3.6.2
1 3 Checl J1 , J2-,and J3.axisDC servo-
motor brushes{or wear.
Replacethe brush if lhe wedr ex-
ceedsthe limit.
3.3.1
3.3.2
6 month inspection
Checkthe origin limil switch rollers
and dogs for wear.
Make a visualcheckand replaceas
neceSsary.
Contact our Service
Division for replace-
ment and adjust-
ment.
Table 4.2.2 Periodic Inspection ltems (Continue)](https://image.slidesharecdn.com/movemasterrobot-210420203455/75/Movemaster-robot-157-2048.jpg)

![4. MAINTENANCE
AND INSPECTION
3.2 Removal
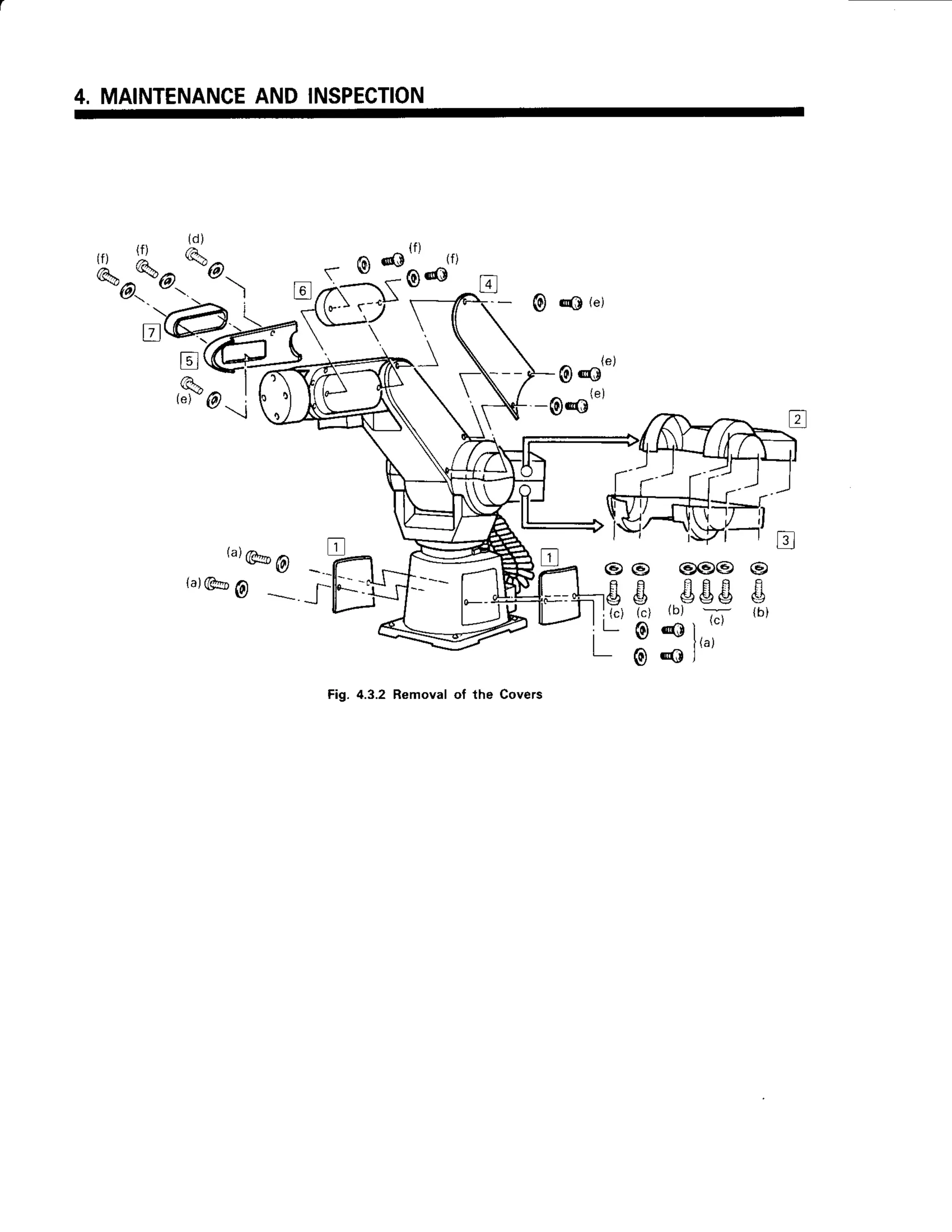
oftheCovers (1) Whenever
the robotis to be serviced,
removethe coversas
shown in Fig.4.3.2.
(2) Table4.3.1Iiststhe namesof the covers.
Table4.3.2givesa
completelistingof attaching
screws.
(3) Some coversmay be hard to remove dependingon the
positionof the robot. In such cases,move the robot as
appropriate
so that the coverscan be removedeasily.
{4) To replace
the covers,reverse
the order of removal
Key CoverName oty
tr Base side cover 2
T;-l
1 z l Uppershoulder
cover 1
fJ
L:] Lower shoulder cover 1
tr upper arm cover 1
fJ
t!l Forearm cover 1
E Pulleycover
tr Cable cover
Table4.3.1CoverNames
Key Screw Name otv
(a) Philliospan head machine screw lvl3 X 14
(b) Hexaqon socket head bolt M3 X 12 2
(c) Hexagon socket head bolt lvl3 X 14
(d) Phillipsflat head machrnescrew lM3 y 6
( e ) Phillipsoval head machine screw M3 X 6 5
1f) Philliosoval head machine screw M3 X 25 4
Table 4.3.2 Aftaching Screws](https://image.slidesharecdn.com/movemasterrobot-210420203455/75/Movemaster-robot-164-2048.jpg)








![4. MAINTENANCE
AND INSPECTION
3.5 Replacement
ofthe Thecurledcables
usedas the cables
connecting
the RV-M1base
Curled
Cables unitandarmunitmustnormally
be replaced
every2,000
hoursof
gPeration
fwo curledcables
areused,powerandsignal.
Thesetwo cables
must be replaced
at the sametime.
A. Replacement
(1) Fig. 4.3.13outlinesthe replacement
procedureof the two
curledcables.
(2) Makesurethatthepowerswitchon thedriveunitrearpanelis
in the oFF position.
13)Remove
the basesidecoversand upperand lowershoulder
coversby referring
to 3.2 Removalof the Covers.
(4) Unplug the three connectors(connectornames: "PW,"
"HND,"and "CON3")whicharepluggedinto positioninside
the base 1..D.
(5) Unplug the eight connectors{connectornames: "PW,"
"HND,""M2,""M3,""ENC2,"
"ENC3,"
"ENC4,5,"
ANd"LS")
which are pluggedinto positioninsidethe shouldercovers.
(6) Each
connector
is identified
bytheconnector
nameprinted
on
the marklng
seal.
(7) Remove
thetwo mountingscrews
(? andpullofftheterminal
plateQ) togetherwith the powercurledcable[4]and signal
curledcable(0 from the base(11.
(8) Remove
the plastic
nutsQ),eachof whichsecures
the power
curledcable@ andsignalcurledcableO, respectively,
to the
motor plate@.
(9) Pull off the two cablesa4)
and (5)from the motor plate(0.
(10)To installnew cables,reverse
the order of removal.
WARNING
When reconnectingthe connectors,be sure they are
connected
in matchedpairsidentifiedby the sameconnec-
tor name. A wrong connectioncan result in a serious
trouble.](https://image.slidesharecdn.com/movemasterrobot-210420203455/75/Movemaster-robot-184-2048.jpg)
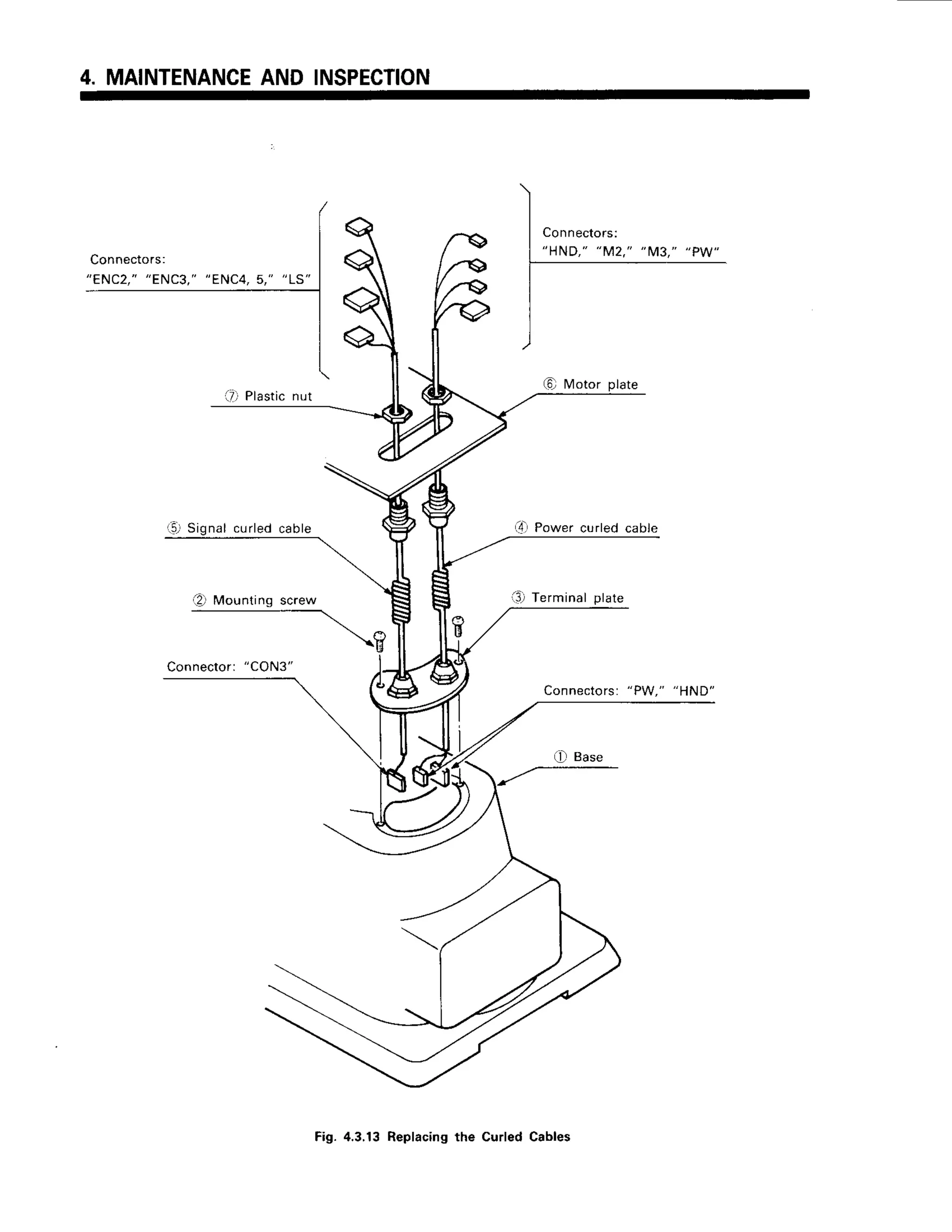

![4. MAINTENANCE
AND INSPECTION
(5)
(6)
Unplugtheshoulder
brakepincontacts
12)
(contact
Nos.1 and
2) from the receptacle
housingin the connectori. See Fig.
4.3.16.
Remove
thetwo setscrews
(3t.
At thistime,usecarenotto lose
thecopperplates
O. Then,remove
thebrake
disk[4],
armature
€,1,and spring [6, from the shaft a0.
(7) Removethe four mountingscrews(91
to removethe coil -47)
from the brakemountingplate(0).
(8) To installa new brake,reversethe order oi removal.
(9) Adjustthe gap by referring
to the procedure
given in B.
(10)Thepincontacts
(a maybeplugged
intoeitherposition,
No.1
and No. 2.
Fig.4.3.16 Removing the Pin Contacts
Fig. 4.3.14 Shoulder Brake Parts ldentification
o.-
q
Brakedisk
L3.r
Setscrew
-
I
. b
i3. Setscrew
(O copper plate
Fig.4.3.15Replacingthe Shoulder Brake](https://image.slidesharecdn.com/movemasterrobot-210420203455/75/Movemaster-robot-187-2048.jpg)

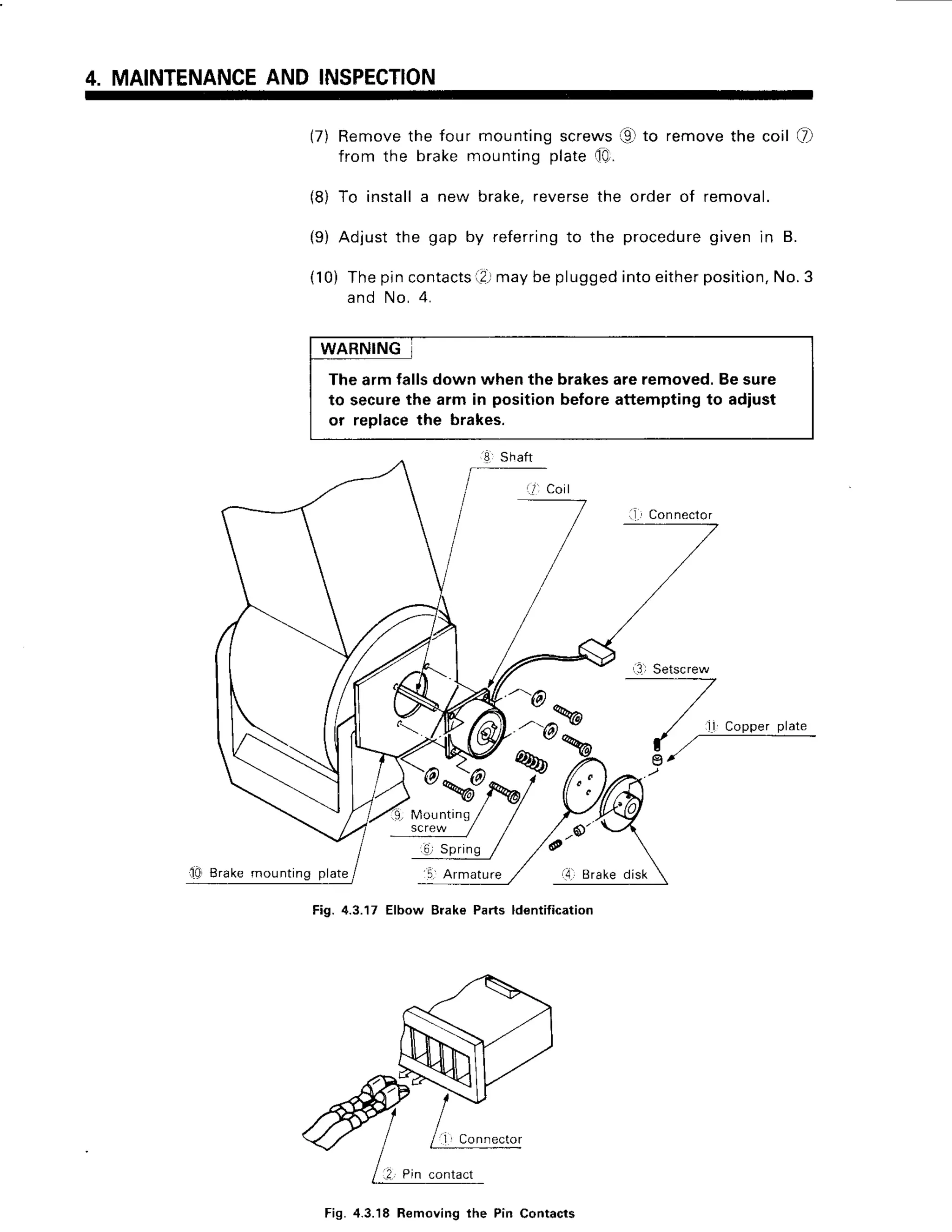
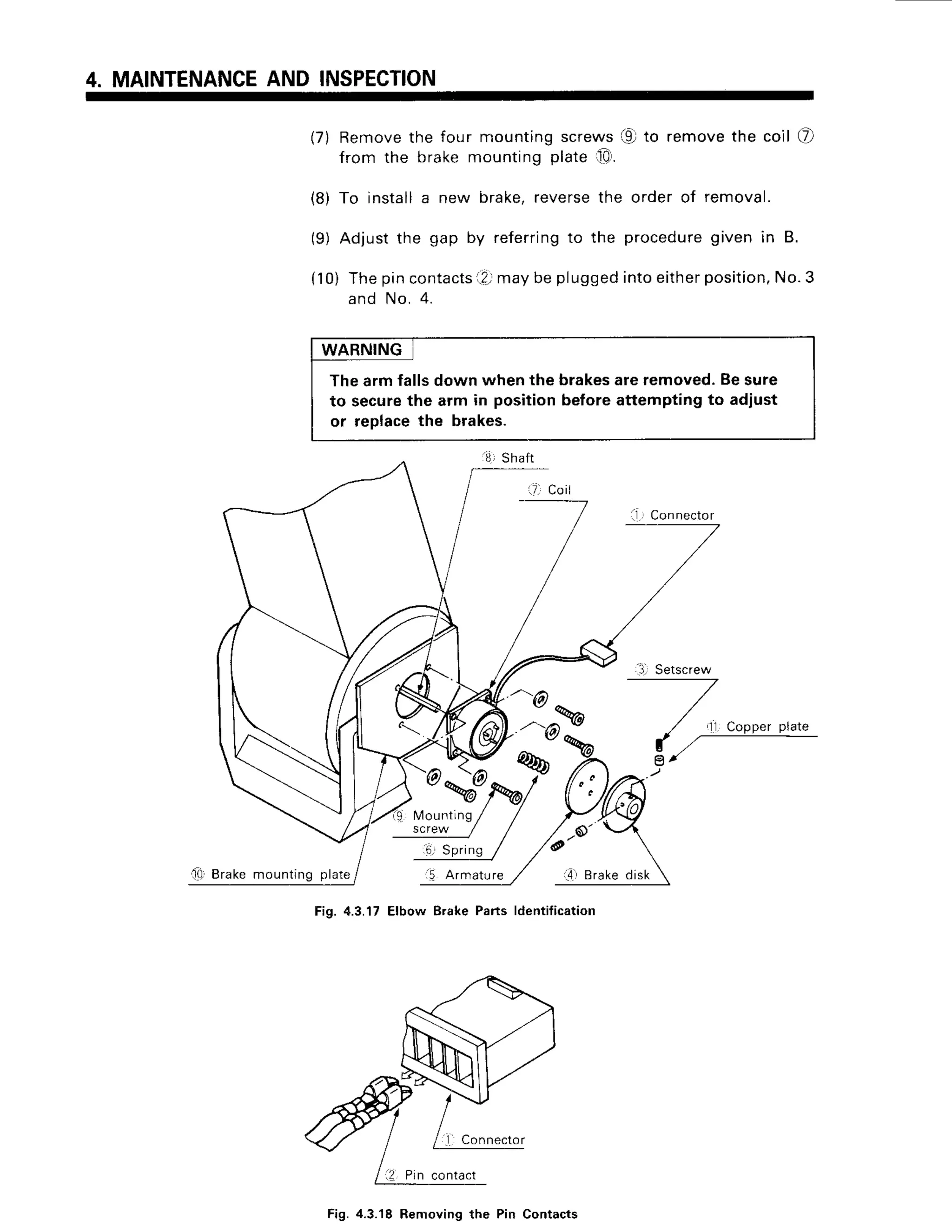

![4. MAINTENANCE
AND INSPECTION
4.2 RobotSpaleParts
Noter 10A for 120Vline voltage;5A for 220,230 or 240Vline voltage.
Table 4,4.2 Robot Spare Parts List
Note lr Oty per unit
Note2r J1 to J5
4.3 DriveUnit SpareParts
No, Oescription Model Manufactulel lnstalled Location otv
1 DC servomotor
30w-J1M
30w-J2M
3OW-J3M
MitsubishiElectric
Waist, elbow,
s h o u l d e r ; 1 e a c h
3
2
Harmonic drive
reoucton gear
BU143C172H02
lCS-14,100,24,G
R)
Mitsubishi
Electric
(Harmonic
Drive
Systems)
Base
3
Harmonicdrive
reouclton gear
BU143C
l73H01 Shoulder, elbow
4
Harmonicdrive
reductiongear
BU144D413H01
(FB-14-110,2
BL3-SP)
Wrist pitch
5
Harmonic drive
reouclron gear
BU144D366H01
(FB-14-110-2
BL3)
Wrist roll
6
Limit switch
assemory
LS-ASSY-.
]i ]
Note2: ShaJ
designation
MitsubishiElectric
Origin-setting
signal
for all axes
5 sets
7
Electromag
netic
brakeassembly
BU144D473G51 Mitsubishi
Electric Shoulder, elbow 2
8 Roller follower NART-6EUUV THK CO,,LTD EIbowdrive link 2
9 Relaycard BU1488136G51 MitsubishiElectric Relay in base 1
1 0 Miniature
bearang F69622 NSK CO.,LTD Shoulder,elbow 4
No. Descliption Model Manufacturel lnstalled Location otv
1 Fuse
MF6ONRl
OA-05
(250VAC, 10A) TOYO
Fuseholderin rear
of driveunit
1](https://image.slidesharecdn.com/movemasterrobot-210420203455/75/Movemaster-robot-193-2048.jpg)
![1.SPECtFICAT|0l{S
2.0PtRATI01{
3.DtSCRtPil0l{
0FT]|tC0itMAN0s
4. 1||AINTEI{A1{CE
AND
INSPTCTIOI{
5.APPENDICES](https://image.slidesharecdn.com/movemasterrobot-210420203455/75/Movemaster-robot-194-2048.jpg)
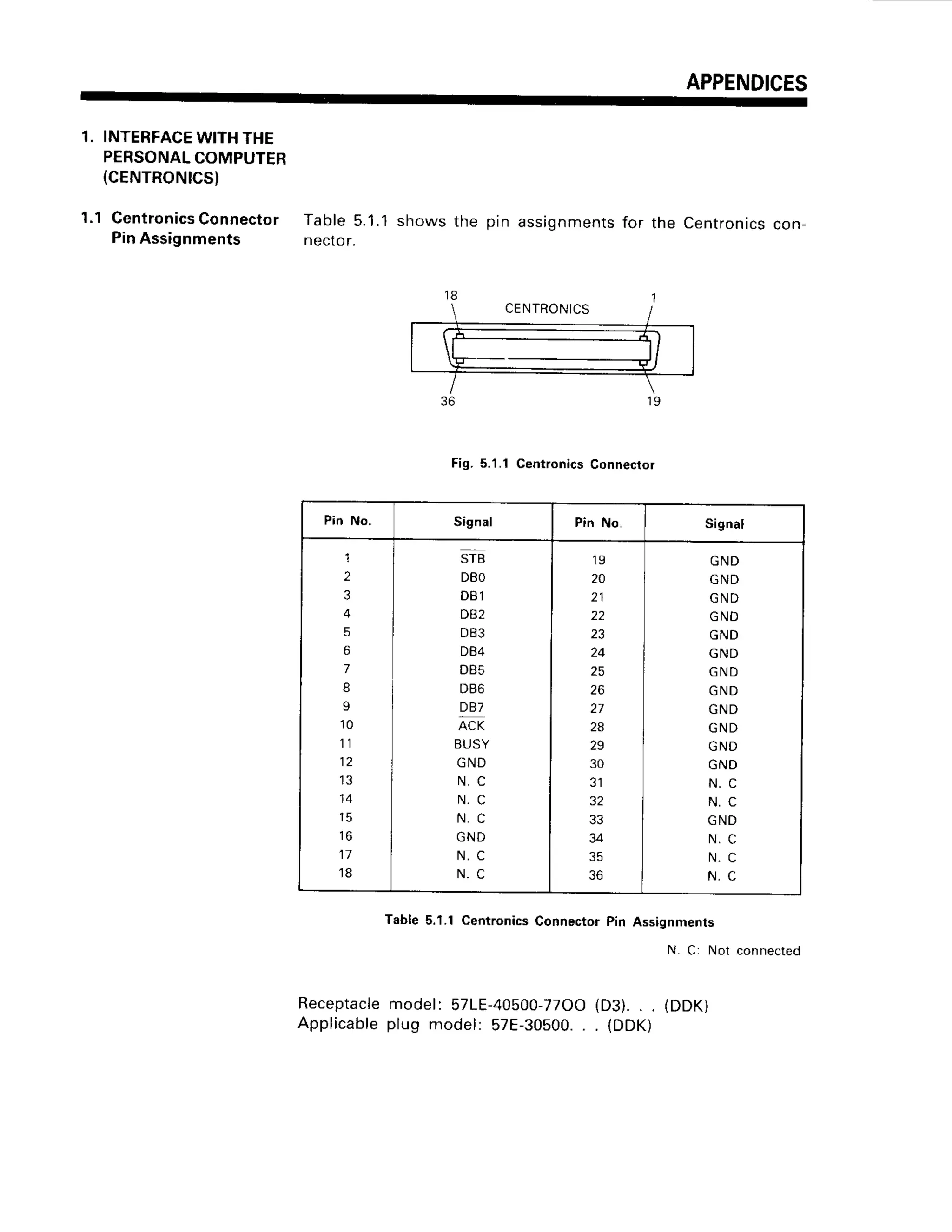
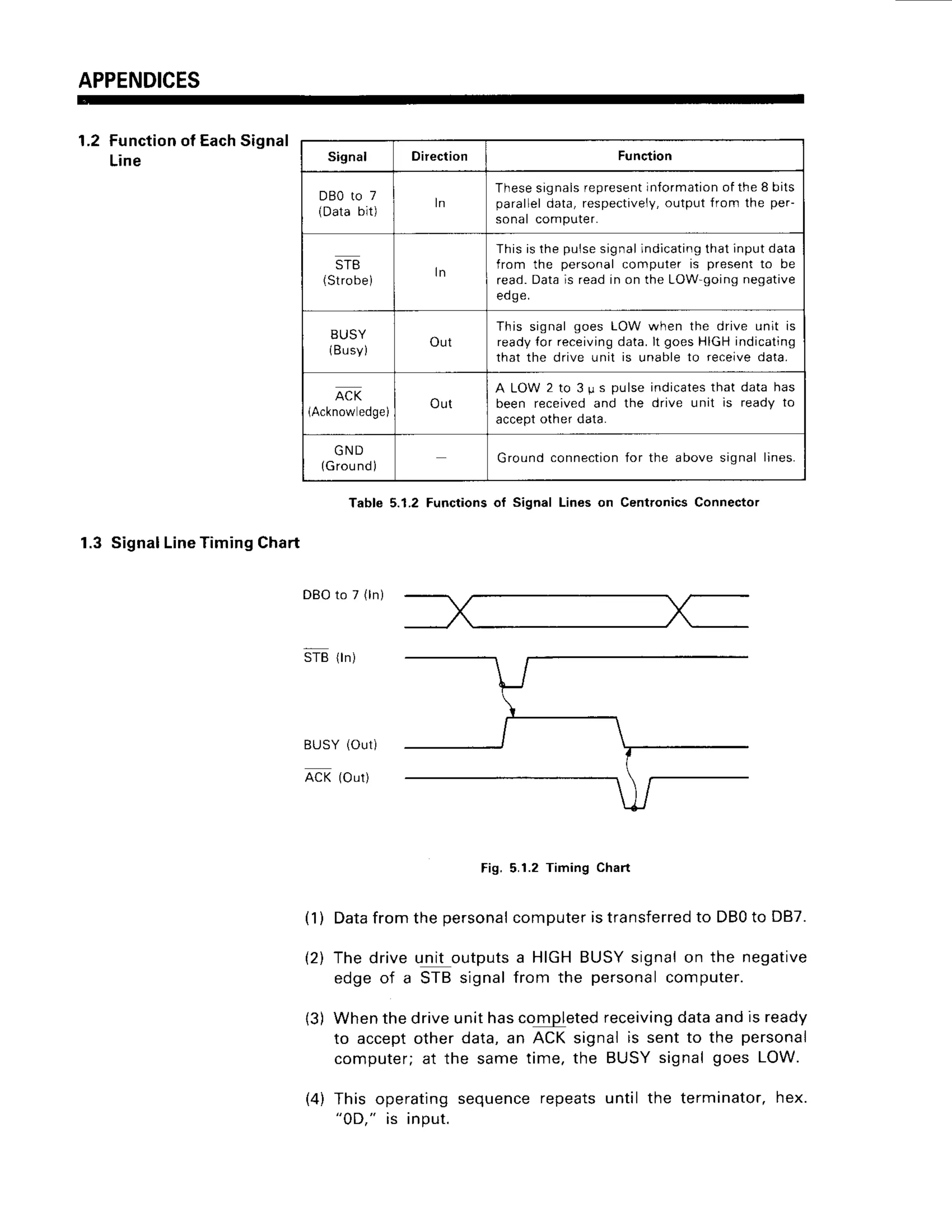

![APPENDICES
2. INTERFACE
WITHTHE
PERSONAL
COMPUTER
(RS232C)
2 1 RS232c
connector
pin Tabre
5.2.'1
showsthepinassignments
for theRS232c
connector.
Assignments
25
F i 9 . 5 . 2 . 1
1 4
RS232CConnector
Table.
Applicableconnector:
5.2.1 RS232CConnector pin Assignmenrs
JAEDB-25P
(mate)or equivalent(JAE)
N. C: Not connected
2.2 Functionof EachSignal
Line
Pin No. Signal Pin No. Signal
l i F G
z bb trxot
3 I notnxot
: I Rs(Rrs)
5 CS (CTS)
b ] DR (DSR)
7 sc
8 I N . c
9 N . C
1 0
I N c
t 1 N . C
1 2 I * .
1 3 N . C
1 5
1 6
1 1
1 8
'19
20
2 1
22
23
25
N . C
N . C
N , C
N . C
N . C
N . C
ER (DTR)
N . C
N . C
N . C
N . C
N , C
Frameground connectedto the FG terminalon
the drive unit.
Provides the lines on which the onve untt
presents data to the personal computer.
Provides
the lineson whichthe personal
compu
rer presents data to the drive unit
This signalmust be set wheneverthe personal
compurerwrshesto transmit data.
CS (CTS) In
This signalis usedto authorize
the drive unit to
transmit data
This sjgnalis usedto indicatethat the personal
computer ls ready to transmit and receivedata.
Signal ground for data and control ttnes.
ERlDTR) Thissignalis usedto indicate
that the driveunit
is ready to transmit and receivedata.
Table 5.2.2 Functions of Signal Lines on RS232CConnector](https://image.slidesharecdn.com/movemasterrobot-210420203455/75/Movemaster-robot-201-2048.jpg)
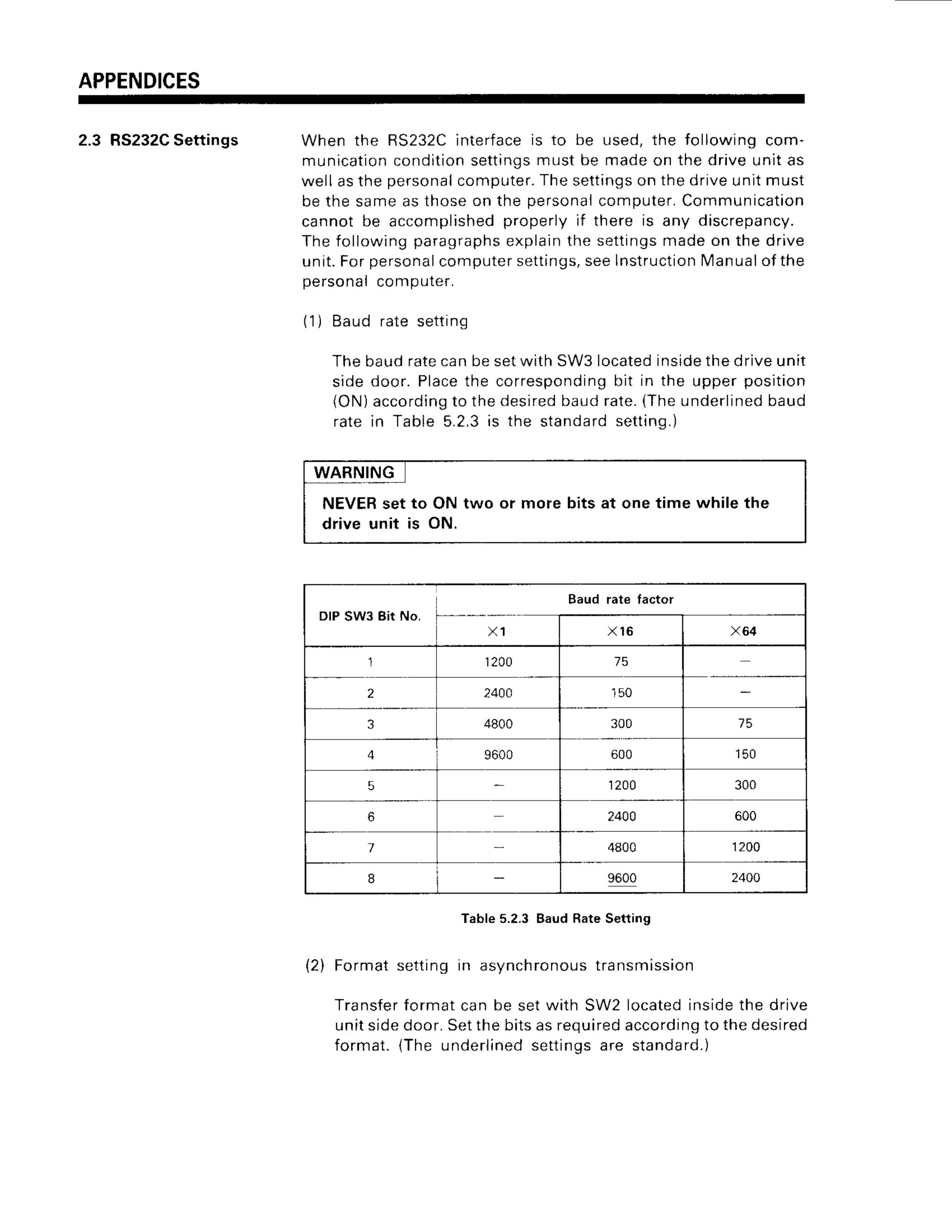
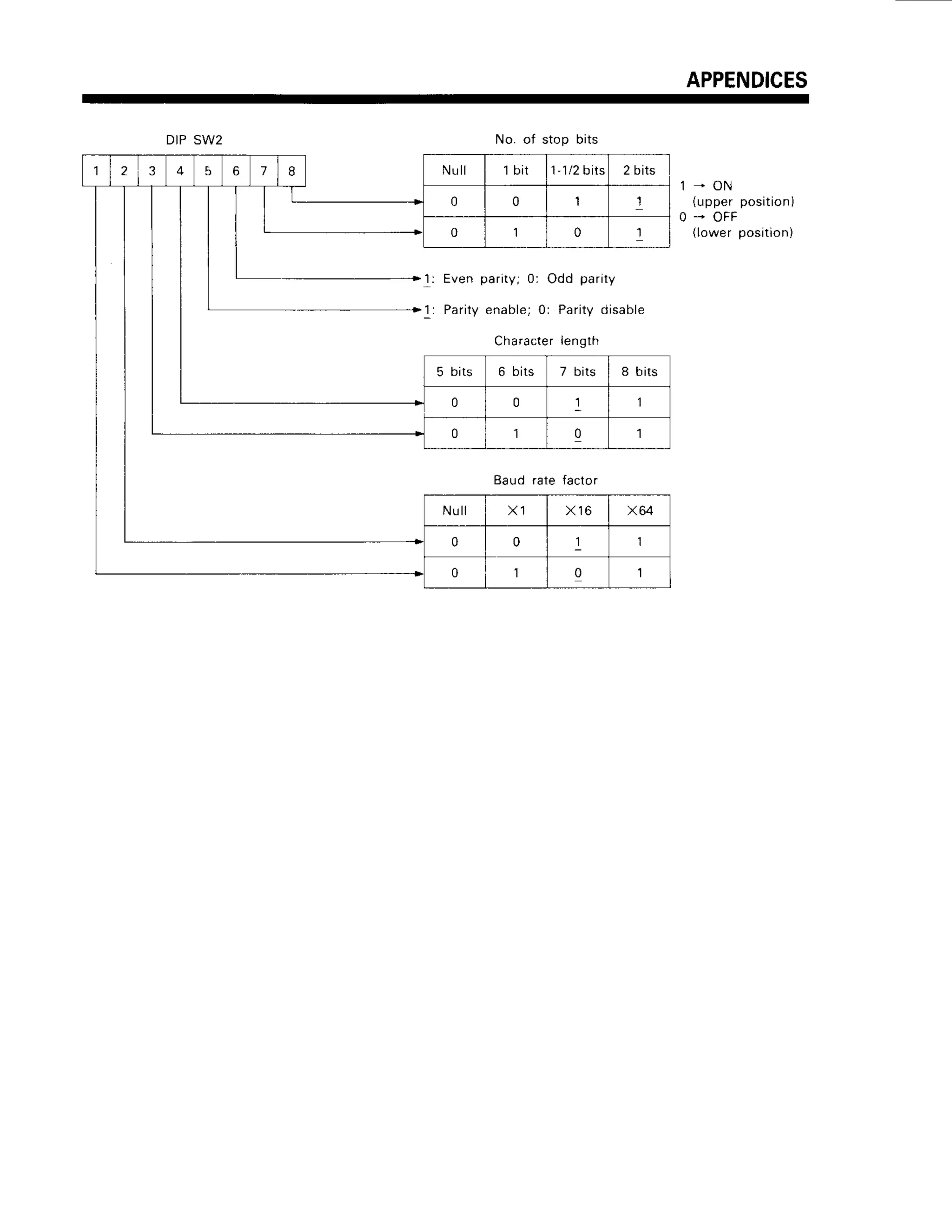
![APPENDICES
2.4 SignalLineTiming
Chart
The RS232Cinterfacewas originally the standard pre_scribing
electricalspecifications,
shapesof connectors,unOpin nrrnO"rr.
As- a result, different pieces of communjcation equipment use
different signal line functions and communication proceCures.
When connectingyour personalcomputerto the robol,tfreretore,
thorough understandingis mandatory of the functions of the
signallinesprovided
for boththe personal
computerandthe drrve
unit.
1) Data rransfer timhg.lrp11persona|
!9]]lp!1g|1o ]g!Sl
(Robot)
'l
st character:
Signals
ER(DTR)
and RS(RTS)
areturnedto HIGHfor up to
1l: ld
177ms.
lf anydatais inpurduringthispenod,both
ER(DTR)and RS(RTS)arerurnedto LOW altowingrhe data
to be read in.
2nd characterand onward
The drive unit causesboth ER (DTR)and RS (RTS)ro go
HIGH to be ready for acceptingdata entry. lf any data is
input, ER (DTR)and RS (RTS)are turned to LOW allowrng
the data to be read in. This operation repeatsuntil a hex.
"0D",
code (CR:carriagereturn)or a hex, ,,0A,,
code (LF:
line feed) is input.
(Personaicomputer)
Transferthe 1st characterwhile DR (DSR) remains HIGH.
Transferthe 2nd and subsequentcharacterswhen DR (DSR)
latergoes LOW and again goes HIGH.
RS (RrS) - CS (CTS)
I 1stcharacter
input I 2nd characler inpLtt
Fig. 5.2.2 Data Transfer Timing trom personal Computerto Robot](https://image.slidesharecdn.com/movemasterrobot-210420203455/75/Movemaster-robot-204-2048.jpg)
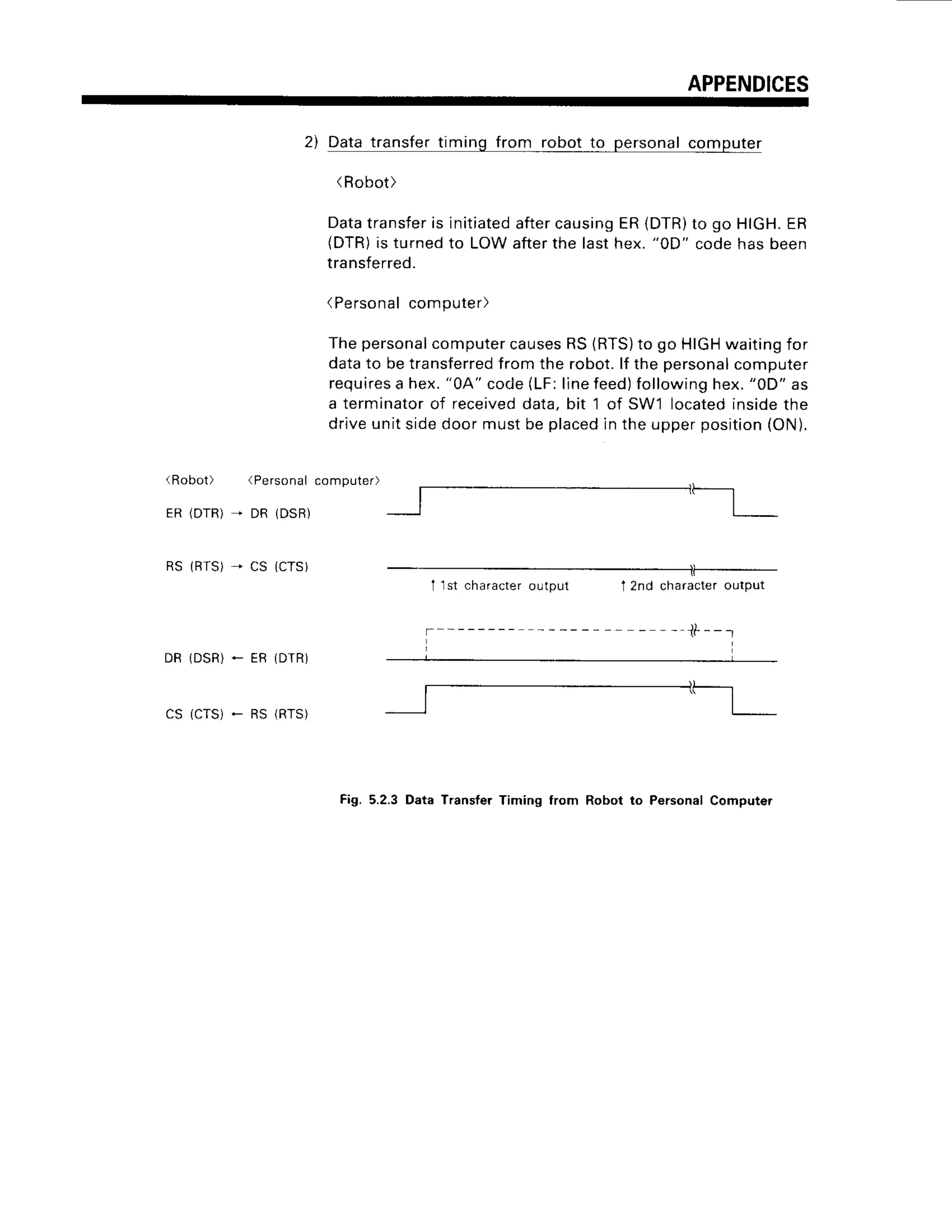
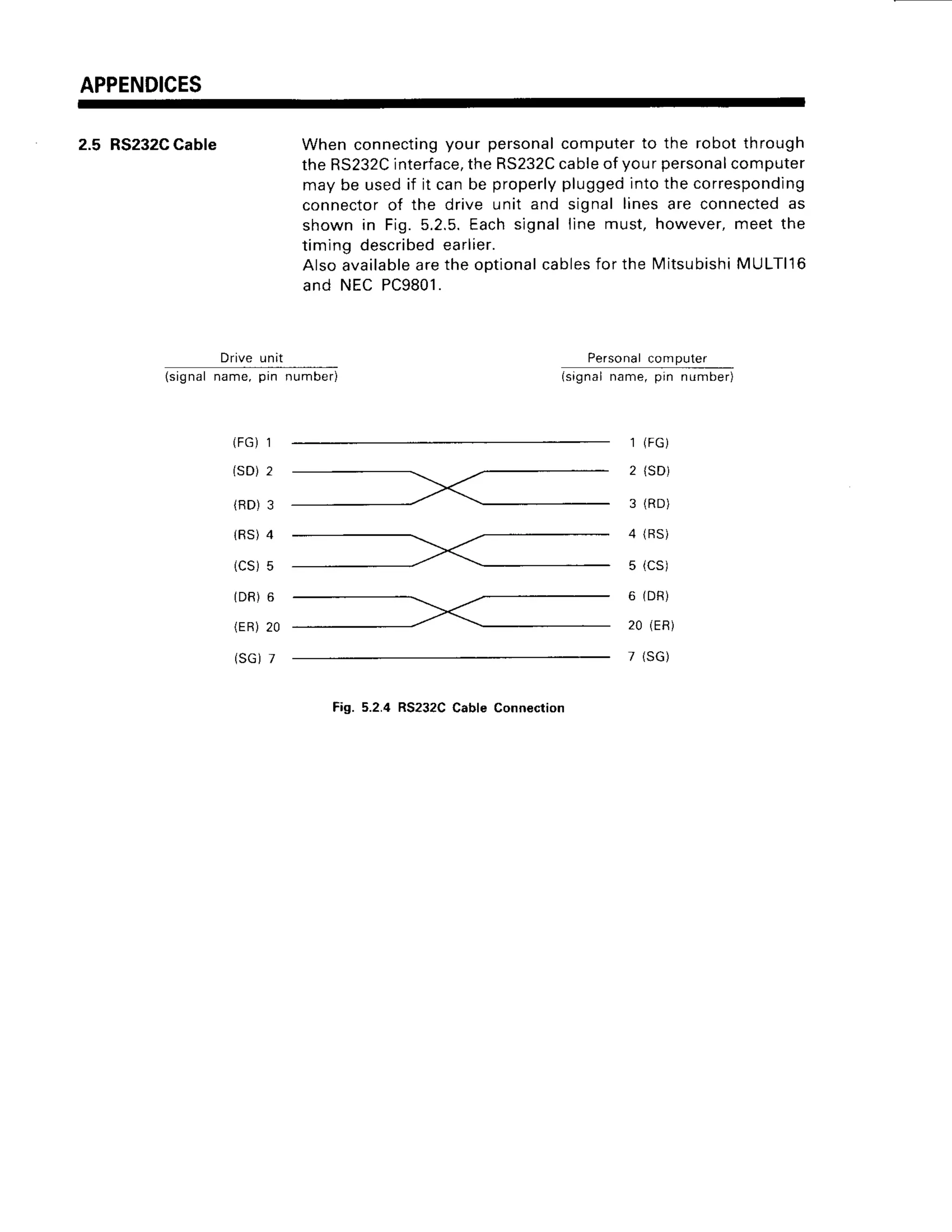

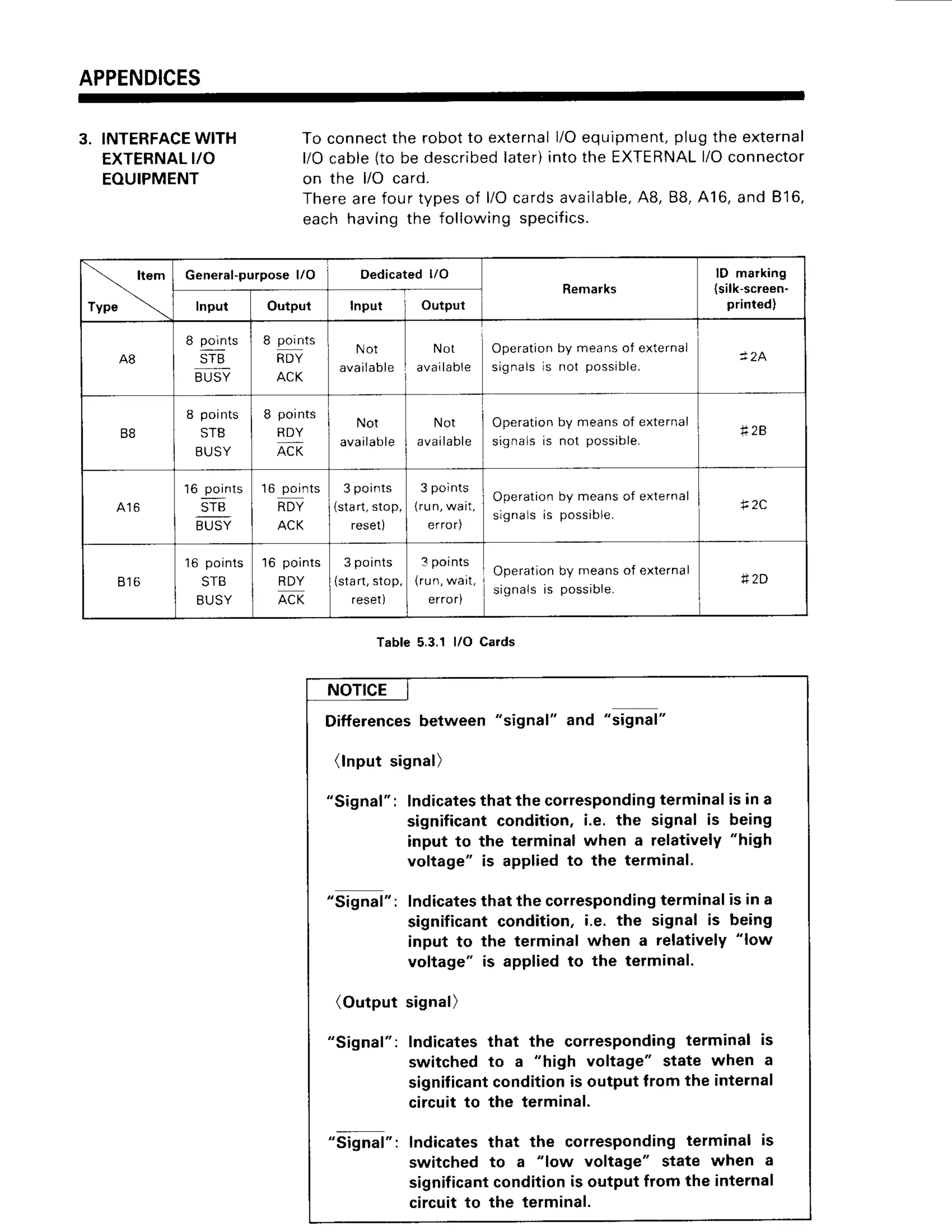
![APPENDICES
3.1.AExternal
l/O
ConnectorPin
Assignments
(Type
A l/OCard)
Table 5.3.2.Ashows the pin assignmentsfor the external l/O
connectoron tvpe A l/Ocard.
"Wire
colors"shown in the Tableare
keyed to those shown in 3.6 Externall/O Cable.Those signals
marked with " are not available in tvpe A8 l/O card.
Fig. 5.31.A Externall/O Connector
Table 5.3.2.A External l/O Connector Pin Assignments {Type A8/16)
Receptaclemodel: 57LE-40360'77OO
(D3). . . (DDK)
Applicableplug model: 57E-30360.
. . (DDK)
Pin No. Signai Wire Color Pin No. Signal Wire Color
Outputport powerlnput
Oltput poatpower rnpirt
t 0
99tt!til!q
OuF,,l
]t ?
o!ll,i,l9J1
O u t p u t
b t 6
Rll 9.!!,t
-
-9Y!P!bil 8
' O1lrpurbit I0
" o{s!!!r 1?
* Output bit 14
- vVtAlT
outlg!
r ERBORoutpul
- {rpl,"E
-
!,!!t q,t 15
-
l!p9!.br1!
r rry"rg!-lj
* InpLrtbit I
Bury9,ul?9t
tryq.q!l
lllollt-.
bll I
rl!"l.bll !
input blt l
Input port power Input
lnp{rt port power input
1 J
1 4
1 5
21
t 1
12
1 /
1B
20
22
23
24
25
Whiteiblir.k A
Yel oy//black A
Bluelblack
A
GreFrn/b1ack
A
Orange/blaci,
A
PinUfrlack
A
Grayrblack
A
Red/irlark
A
V oletlblackA
Erown,'blackA
White/blackC
Yellow,/back C
Blue/black
C
Gfeen/black
C
Ora.gelbl3ckC
PiN
i(iblack C
Gray/black
C
Redi
black C
Vloletibldck C
Brown/blackC
Yellow/red A
Bi!e/red A
Green,eo A
OrangelredA
26
2r'
28
29
30
3 t
32
33
34
35
36
37
38
39
40
4 1
42
43
44
41
Arj
49
50
Outputport GNDoutput
Cutp.rtport GND outpLrt
9!!P-{ ql l
o!tp{ !! J
orr!91
!,! !
Outputbit 7
49!iT!!
, q!tS{ b,t,s
' oLtlp-Ll_r.
,911.
-1,1
* Oirtpul-blt.
'l3
" ol4put bit 15
'
1!1 99!Pu'
. sr4!I ,r'!r,t
-
!!!lI lset
'!!"t q!11
t inpLrtbit 12
t I n p u t b i t 1 0
*,lip,ut bit 8
STB input
lnq!! b,t9
lls{ !r 1
I'q!. q[ 2
Input bit 0
Input port GND outp!t
Inpui pon GND output
White/black I
Yellow/black B
Blue/blackI
Green/back B
Orange/black
B
Pink/black
B
Gray/biackB
Red/blackI
Violet/black
B
Brown/black B
White/black D
Yellow/black D
Blue/black
2
Green/black
D
Orange/black D
PinUblackD
Gray/black D
Bed/black D
ViolevblackD
Brown/blackD
White/red B
Yel ow/red B
Blue/redB
Green/redB
Orange/redB](https://image.slidesharecdn.com/movemasterrobot-210420203455/75/Movemaster-robot-211-2048.jpg)
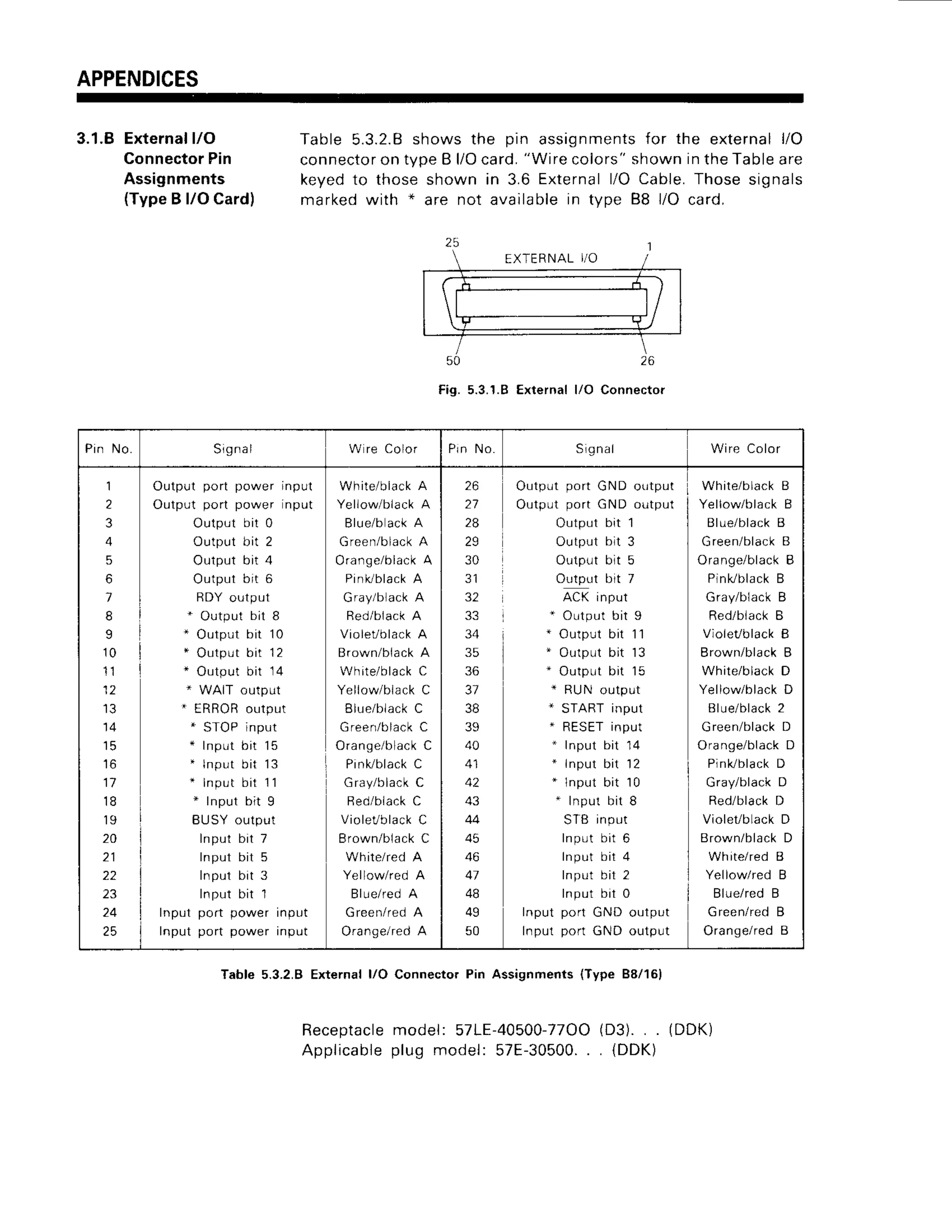
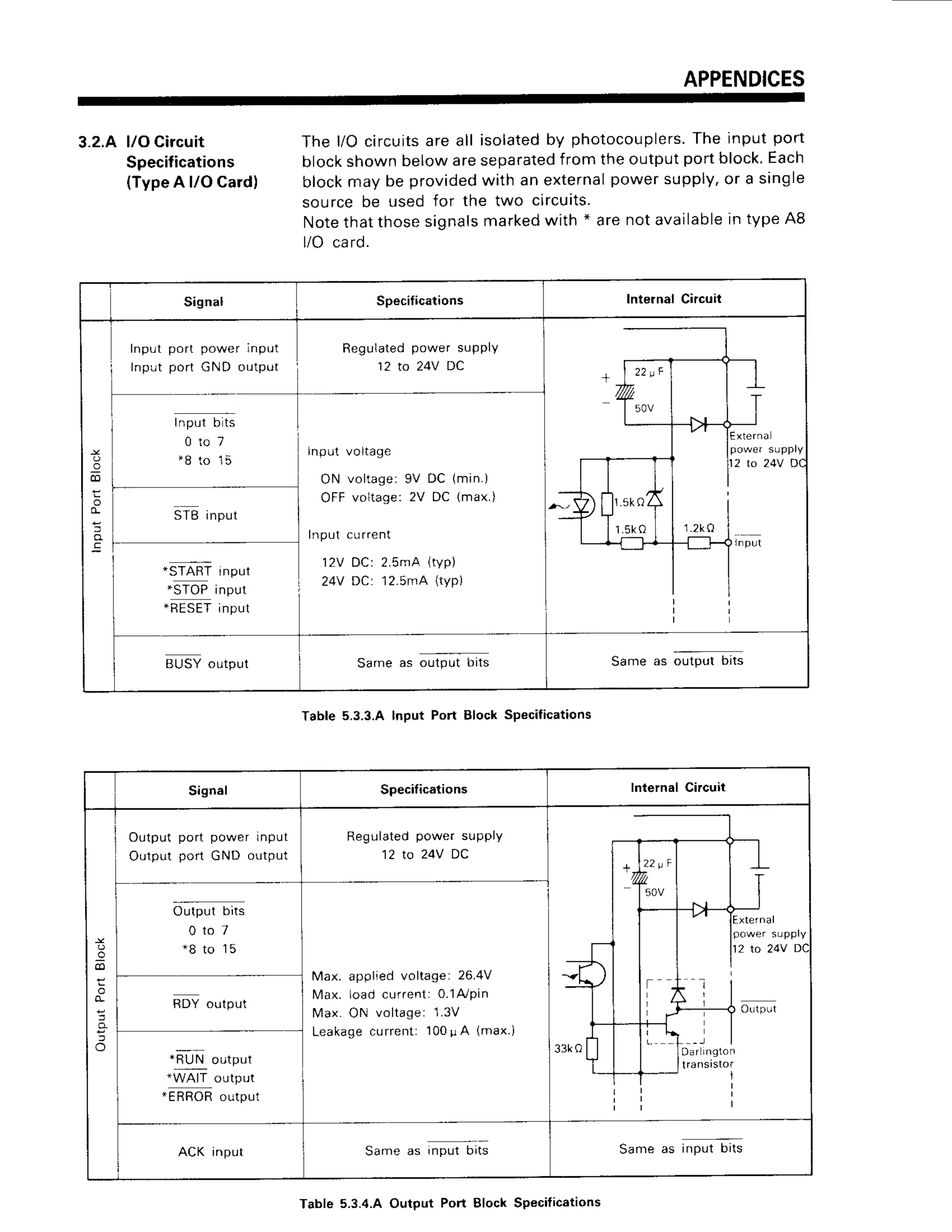
![APPENDICES
3.2.Bl/OCircuit Thel/Ocircuits
areall insulated
by photocouplers.
Theinputport
Specifications blockshownbelowareseparated
fromtheoutputportblock.
Each
(TypeB l/OCardl blockmaybe provided
with an external
powersupply,
or a single
sourcebe usedfor the two circuits.
Notethatthosesignals
marked
with * arenotavailable
in type88
l/O card.
Table 5.3.3.8 Input Port Block Specifications
Signal Specifications InternalCi.cuit
E
o
InpLrtport power nput
InpLrtport GND output
Regulated
power supply
12 to 24VDC
External
2 a 24V D(
Input
Inputbits
0 t o 7
"8 to 15
lnput voltage
ON voltage: 9V DC (min.)
OFF voltage: 2V DC (max.)
Input current
12V DCi 2.5mA (typ)
24V DC: 12.5mA (typ)
STBinput
*STARTinput
*STOPinput
TRESET
input
BUSYoutput Sameas outputbits Sameas outputbits
Signal Specitications lnternal Circuit
_9
o
Output port power input
Outputport GNDoutput
Regulatedpower supply
12 b 24V DC r-rT---Tr
l + 1 2 2 ! F l I I
l r u | l r
l - l 5 o v l | |
t{-___sl__4_J
t l
| | | l p o 6 e ( , p p l y
f] | | ltt rcruvor
--F
| | | :
r y l l r J , i
# i l
| | I , H o u t p u t
t t t f t
A l l r t t I
3 3 h o ll l I l D d r r i n e r o n
T I I ltrans'stor
._J-,-r-
i
i i l
Output bits
0 t o 7
*8 to 15
lMax. applied voltage: 26.4V
Max. load current: 0.'lA,/pin
Max. ON voltagei
'1.3V
Leakagecurrenti 100l]A (max.)
RDYoutput
*RUNoutput
*WAIT output
*ERROR
output
ACKinput Same as input bits Same as input bits
Table5.3.4.8Output Port Block Specifications](https://image.slidesharecdn.com/movemasterrobot-210420203455/75/Movemaster-robot-214-2048.jpg)

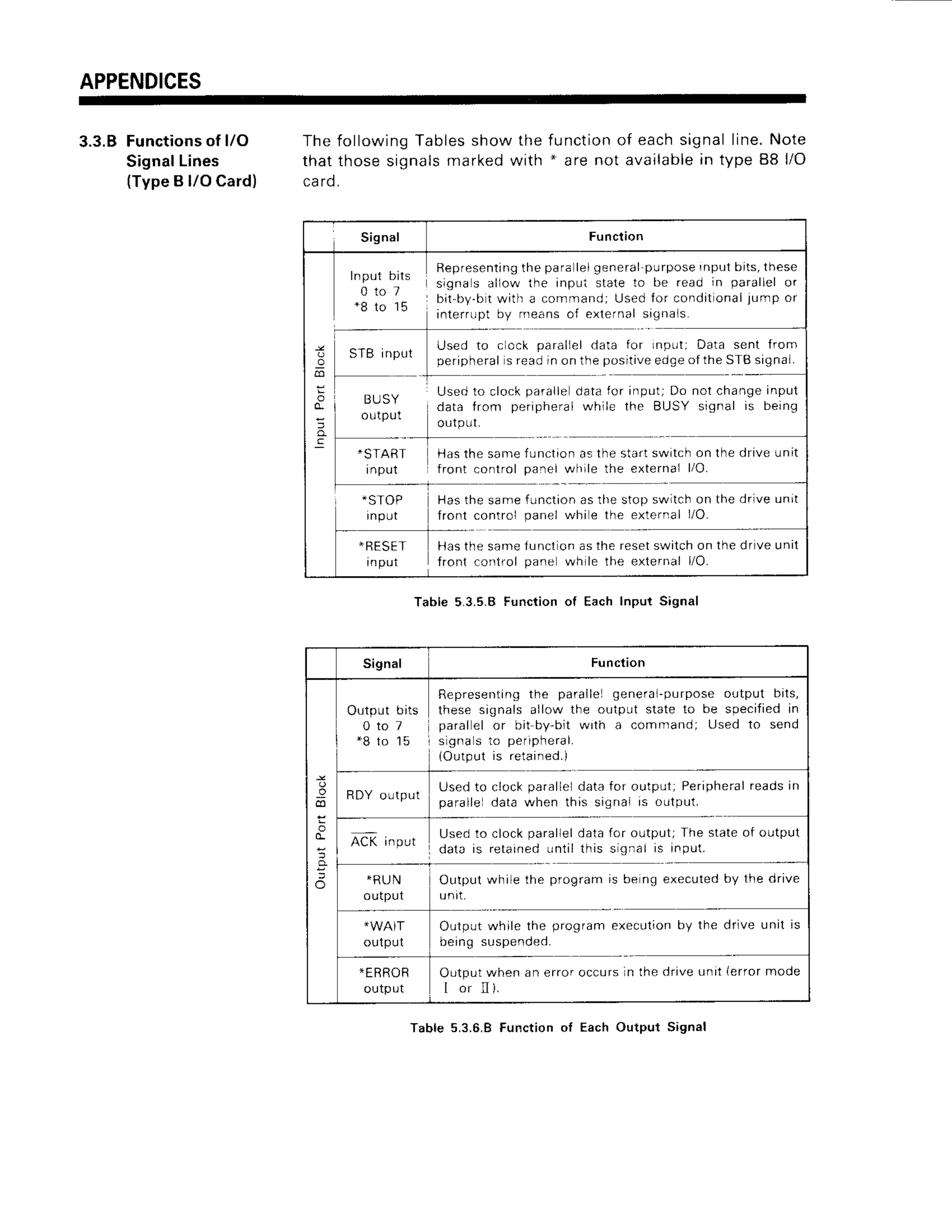

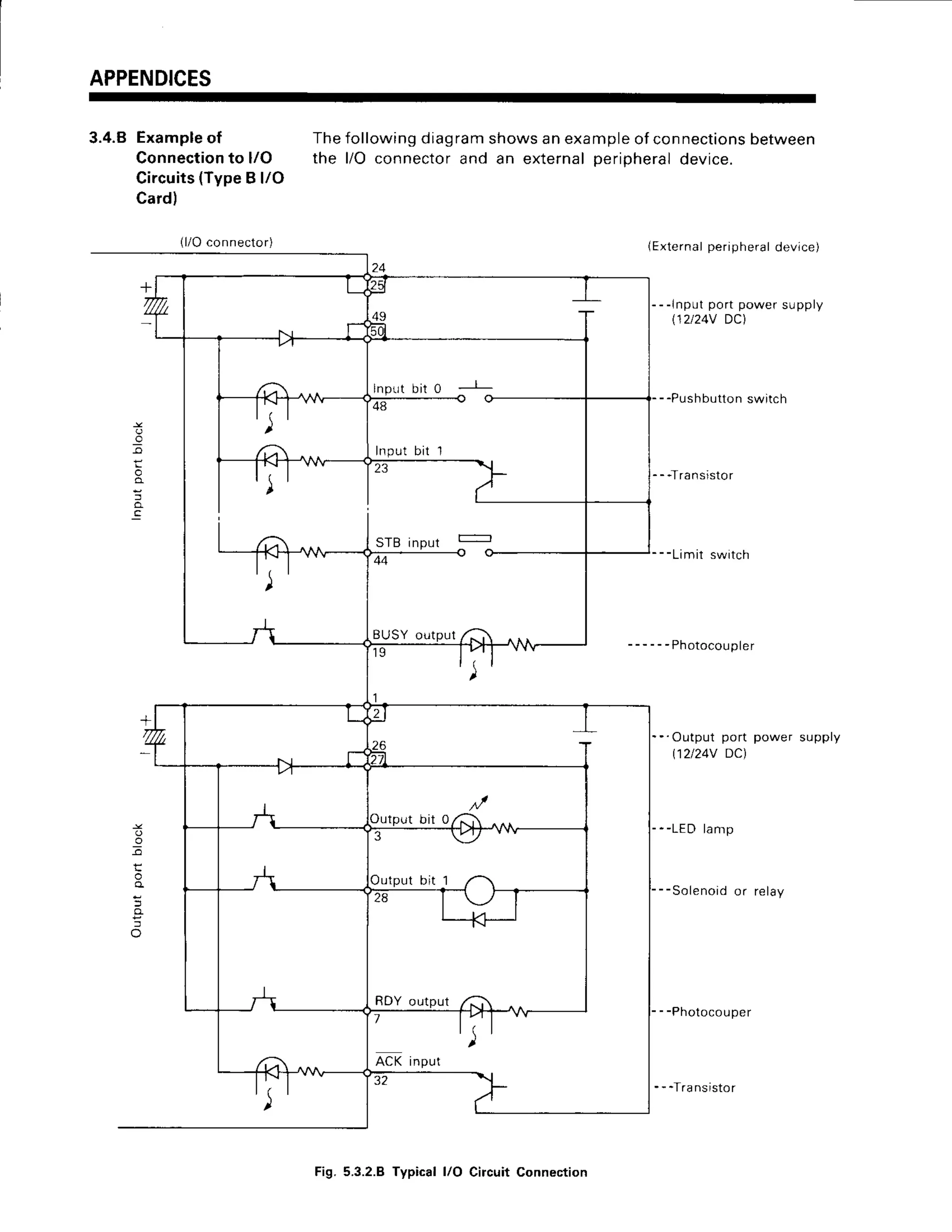
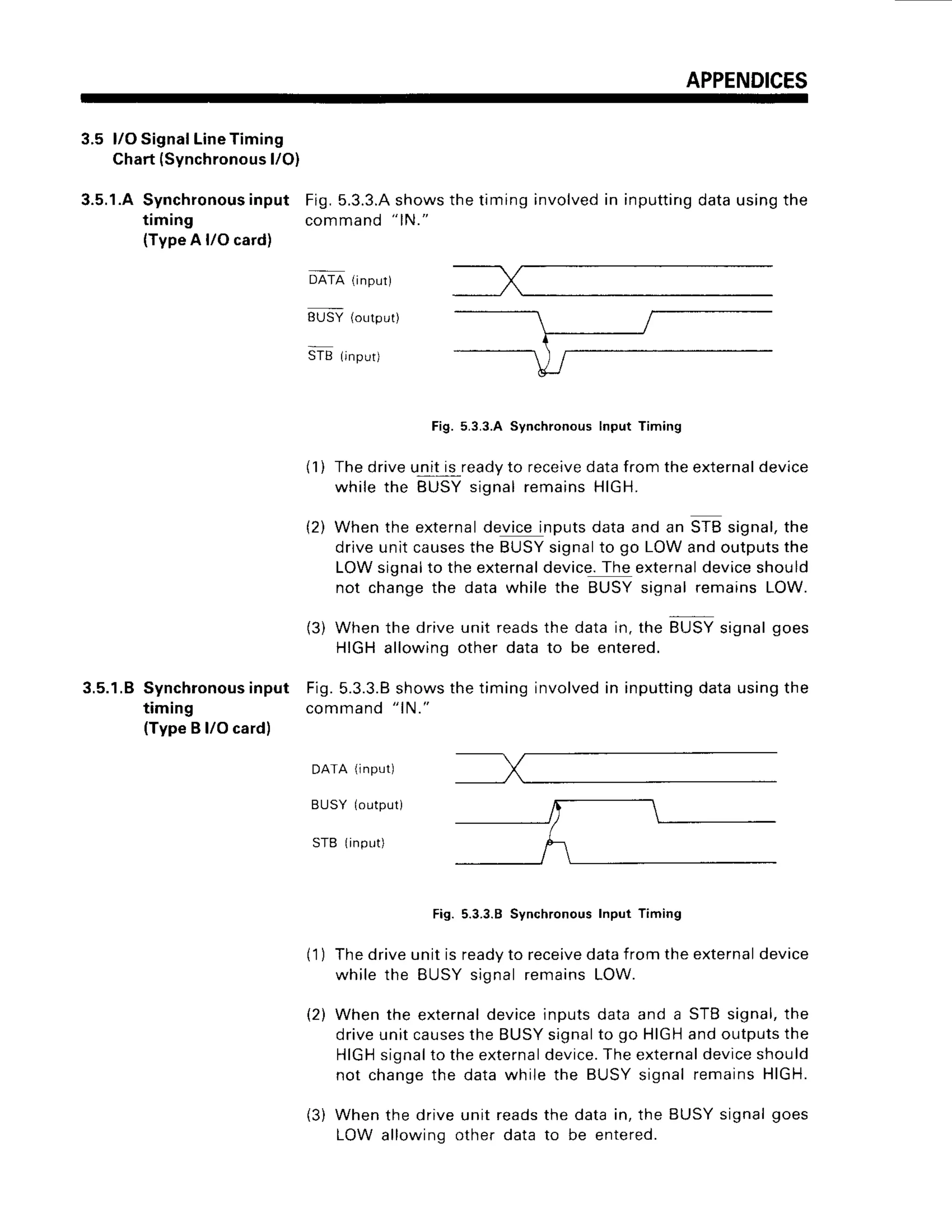
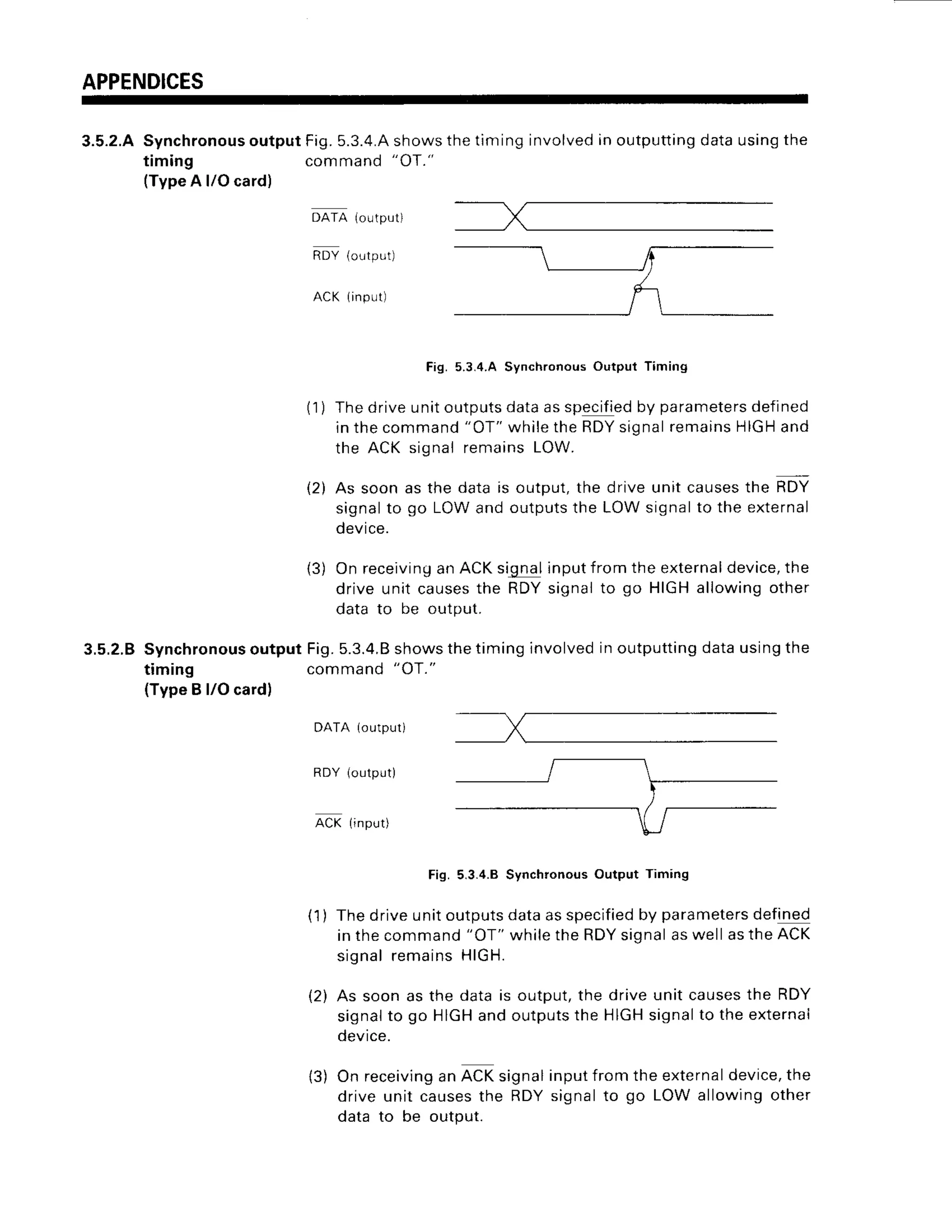
![APPENDICES
3.5.3.ADedicated
l/Otimingln a robotic
operation
environment
on theactual
production
floor,
(Type
A l/O card) operation
is possible
(iftypeA16l/Ocardis beingused)through
thededicated
signaI linesofthe l/Oconnector,
instead
of usingthe
front controlswitcheson the drive unit.
Following
describes
the necessary
settings
to be madeandsignal
timino involvedin this oDeration.
(1) Make the following switch settingsby referringIo 2.1.2
Functions
of side settingswitchesand LEDs,OPERATION.
Bits3 and 5 of SW1
: Upperposition{ON)
(2) When the abovesettingshavebeen made,drive unit front
controlswitches
aredisabled
exceptfor the emergency
stop
switch.
(3) In these settings,the program can be started,stopped,
restarted,
and reset(including
resetting
of errormode ]I) by
means of dedicatedinput signals.The function of each
dedicated
input signalcorresponds
to that of the drive unit
front controlswitchas follows.
(FrontControlSwitches) (Dedicated
Input Signals)
E v e n t- - - - - - - - . - - - -
STARTinput signaI
STOPinputsignal
RESET
input signal
(program) Reset(errormode il)
r______l__
STARTswitch
STOPswitch
RESET
switch
t4l Output
fromthededicated
outputs
arethesignals
correspond-
ingto therobotoperating
conditions
(RUN,
WAIT,andERROR
outputs).
These
signals
areoutputin eithersetting,
whetherIn
external
operation
or frontcontrolgwitch
operation
mode.Fig.
5.3.5.A
showsthe dedicated
l/O timing.
Start
I
Reset
I
Stop
I
Restart Stop
l l
STARTinput
STOPinput
RESET
input
RUNoutput
WAfT output
ERROR
output
Fig. 5.3.5.A Dedicated l/O Timing](https://image.slidesharecdn.com/movemasterrobot-210420203455/75/Movemaster-robot-221-2048.jpg)
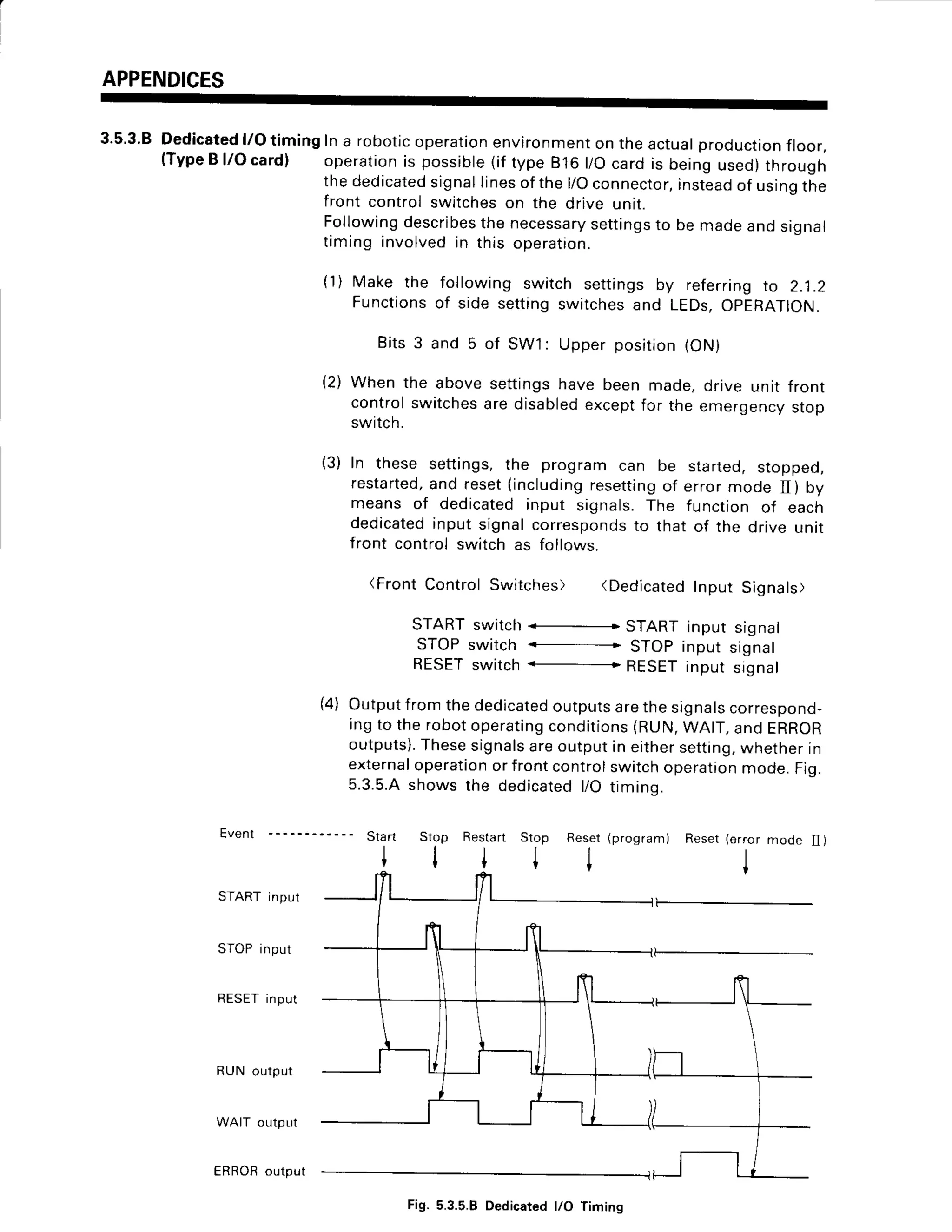


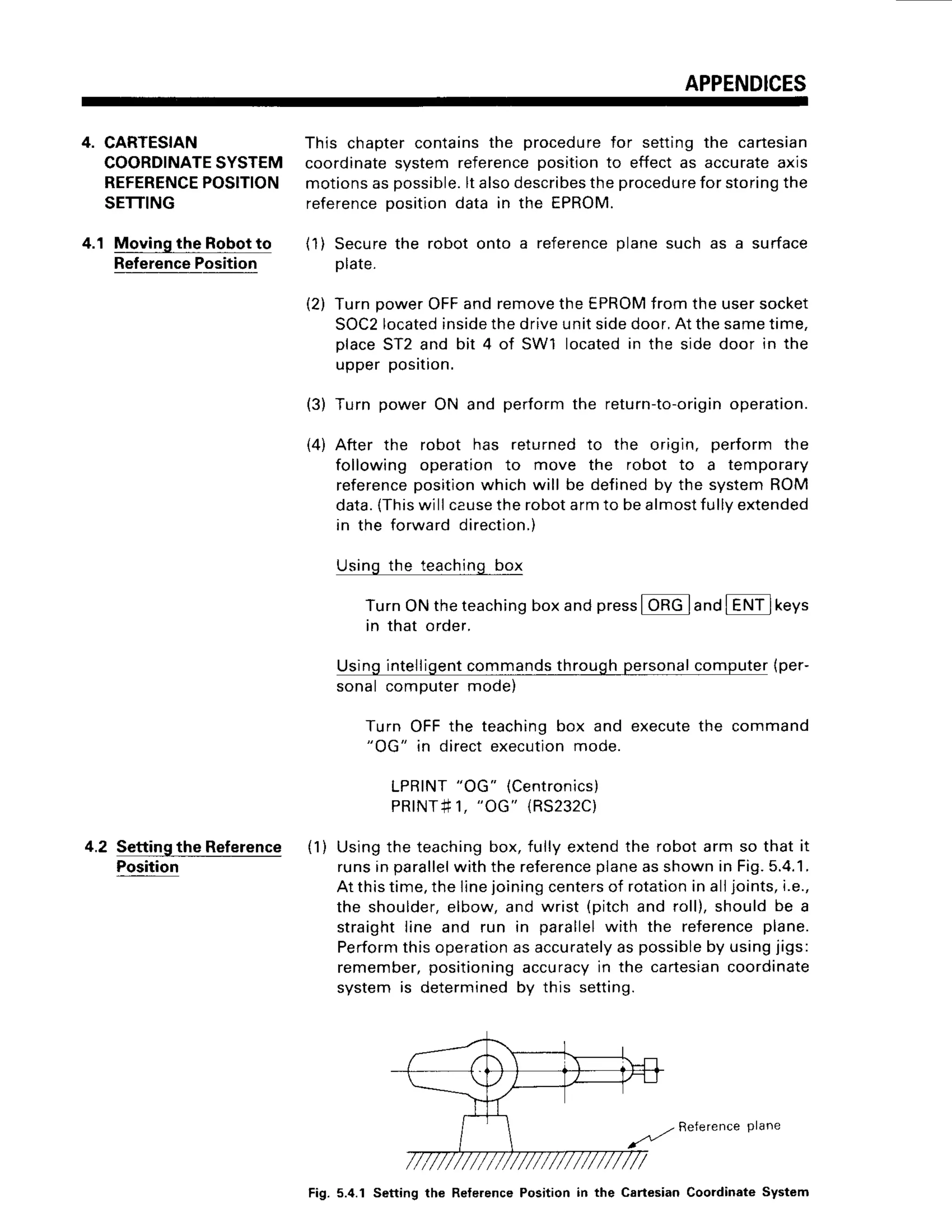
![APPENDICES
(2) Perform
thefollowingoperation
to define
thecurrentposition
as the reference
position.
Usingthe teachingbol
TurnONtheteaching
boxandpress
[F.S-],
@, anaIENil
keysin that order.
Usingintelligent
commandsthroughpersonalcomputer
Turn OFFthe teachingbox and executethe command
"HO" in directexecutionmode.
LPRINT
"HO" (Centronics)
PRtNTfi1,
"HO" (RS232C)
(3) Place
bit4 of SW1located
inside
thedriveunitsidedoorinthe
lowerposition
(OFF).
Thisinhibits
thesettingof the reference
position.
(4) This completes
the reference
positionsettingprocedure.
4.3 StoringReference Thereference
position
datajustdefined
is storedin thedriveunit
Position
Datain EPROMRAMasposition
number"0." Now,writethedataintotheEpROM
by followingthe stepsgiven below.Theseprocedures
may be
performed
afterotherpositiondatahavebeendefinedand the
)rogramstepshave beenwntten.
(1) Readyan erasedEPROMand insertit into SOC2locatedinside
the drive unit side door.
{2) Performthe followingoperationto write the reference
position
data into ROM.
Using the teaching bgl
TurnONtheteaching
boxandpress
IWRil and[ENi] keys
in that order.
Usingintelligent
commandsthroughpersonalcomputer
Turn OFFthe teachingbox and executethe command
"WR" in directexecution
mode.
LPRINT
"WR" (Centronics)
PRINT#1,
"WR" (RS232C)](https://image.slidesharecdn.com/movemasterrobot-210420203455/75/Movemaster-robot-226-2048.jpg)
![APPENDICES
5. PROGRAMMING lt is wise to createa programmingsystemwhen a personal
SYSTEM
USING computeris usedto operatethe robotand generate
programs.
PERSONAL
COMPUTERThischapter
introduces
a simpleBASIC
program
asanexample
of
thepersonal
computer
application.
Thisprogramassumes
theuse
of the RS232C
interface
and allowsthe use of all Movemaster
commands.
Inaddition,
by makinguseof thescreen
editorfacility
of the personalcomputer,data shown on the displaycan be
)orrected
by meansof the cursorand keyboard.
Note that some modifications
of the programare necessary
depending
on the model of your personal
computer.
lOOO
1 ******** RV_M1
PROGRAMMING
SYSTEM
**+*****
USINGMULTI16 BY IlITSUBISHI
ELECTRIC
***:+**I
1 0 2 0 '
1030OPEN
"COM1
19600,E,7,2"AS
f1 Varies
with different
personal
computer
models.
1040LINEINPUT;A$
1050c$:LEFr$ (A$,2)
1060lF C$:"DR" THENPRINT:GOTO
1170
1070lF C$:"1R" THENPRINT:GOTO
1240
1080lF C$:"PR" THENPRINT:GOTO
1360
1090lF C$:"WH" THENPRINTTGOTO
1600
1100iF C$:"CR" THENPRINT:GOTO
1780
1 1 1 0l F C $ : " E R " T H E NP R I N T T G O T O
1 9 1 0
1120PRINT* 1,A$:PRINT
1130GOTO1040
1140',
1 1 5 0
1 1 6 0 , + * * * * * * * R S 2 3 2 c | N P U T D A T A R E A D ( , D R , ) - " * * - * * *
1 1 7 0P R T N T
4 1 , A $
1 1 8 0L I N EI NP U T + 1 , 8 $
1190PRINT
"INPUTDATA:" ;B$
't200GoTo 1040
1 2 1 0 '
1 2 2 0 '
1230' +****++*RS232C
PROGRAM
LINEREAD1',1R',)
********
1240INPUT
"STARTLINE:" ;S
1 2 5 0I N P U T
" E N DL I N E : " ; E
1260FORl:S TO E
1270 PRrNT
#1,
"LR" +STR$(l)
'1280 LINEINPUTf, 1,A$
1290 lF A$:" "THEN1310
1300 PRINT
l; :PRINT
A$ (Note)
lf the LPRINT
statementis used insteadof the
PRINT
statement,
thecontents
of the programcan
be outputto the printer.
13']
O NEXTI
1320GOTO1040
1 3 3 0 ' ,
1340',
RS232C
POSITION
READ1',PR',)
".****.*
']360INPUT"STARTPOSITION:";S
1 3 / OI N P U
T " E N DP O S I T I O N - "
; E
1380PRINT
"POS.NO.";
SPC(3);"X(mm)Y(mm)Z(mmi P(des)
R(deg)":PRINT
1390FORl:S TO E](https://image.slidesharecdn.com/movemasterrobot-210420203455/75/Movemaster-robot-228-2048.jpg)
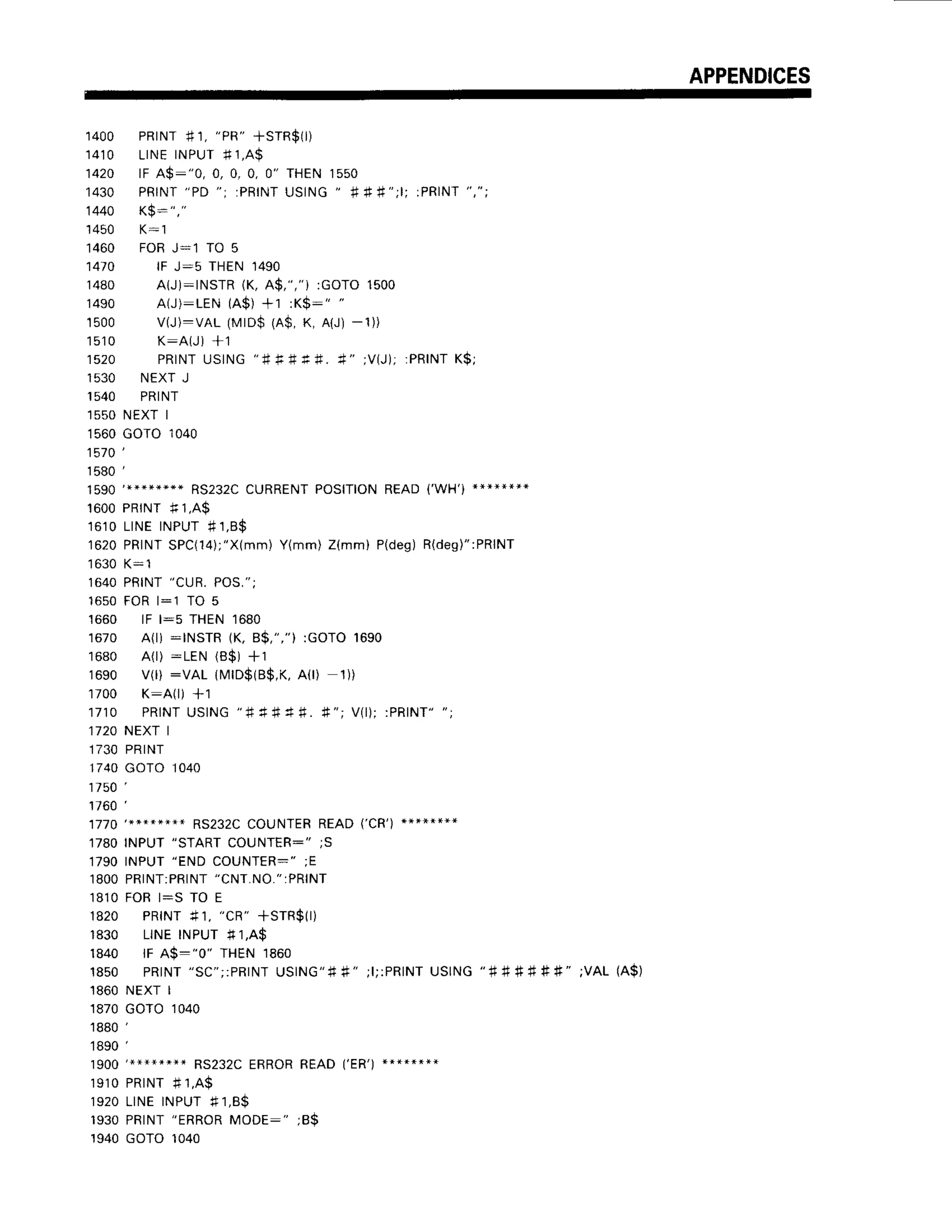
![APPENDICES
(Applications)
R U NJ
N T J
M O l l
G O I
M O 2 l
DW 10,20,30I
)
10 MO l,CI .. ...Program
generation
example
20 MO 2,OJ
3 0 G C I
40 DW 10, -20, 30J
5 0 E D J
5
LRJ 'ProgramreadexampleXl
STARTLINE:?]0J (Reading
the programon specified
ENDLINE:?50
I line numbers
throughRS232C)
1 0 M O l , C
20 tvto 2,o
30 GC
40 DW +10.0,-20.0, +30.0
50 ED
R N l OI
5
''''''',' Program executionexample
. ... .Current position read example
''''''''' Positionread example X2
(Reading the position on specitied
line numbers through RS232C)
X {mm) Y (mm) Z (mm) P (deg) R (deg)
cuR. Pos. 10.0 380.0 50.0 -70.0 -40.0
P R J
S T A R T
P O S I T I O N : 1 J
E N DP O S I T I O N : 2 J
POS.No. X (mm) Y (mm) Z (mm) P {deg) R (deg)
PD 1, 0.0, 380.0, 300.0, -70.0, -40.0
PD 2, - 10.0, 350.0, 280.0, -70.0, -30.0
X 1,2: To correctany programand positionreadby usingthe
cursorand required
keys,
the returnkey(J ) mustbe hit
attheend(ontheright)ofthelineandposition
corrected.
x 3 : Hexadecimal
datain the programreadis displayed
as
decimaldata (e.g.OD&FF- OD255).](https://image.slidesharecdn.com/movemasterrobot-210420203455/75/Movemaster-robot-231-2048.jpg)

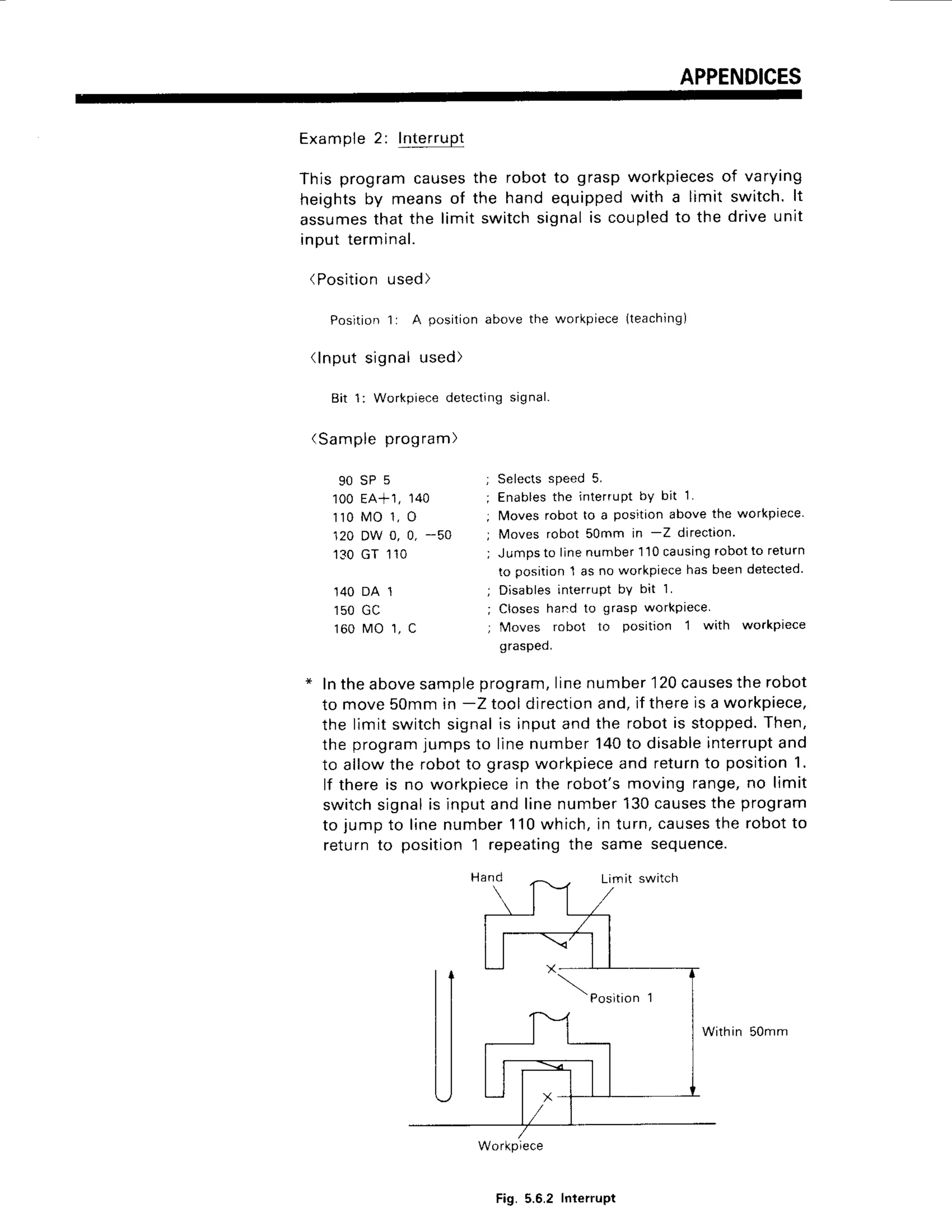
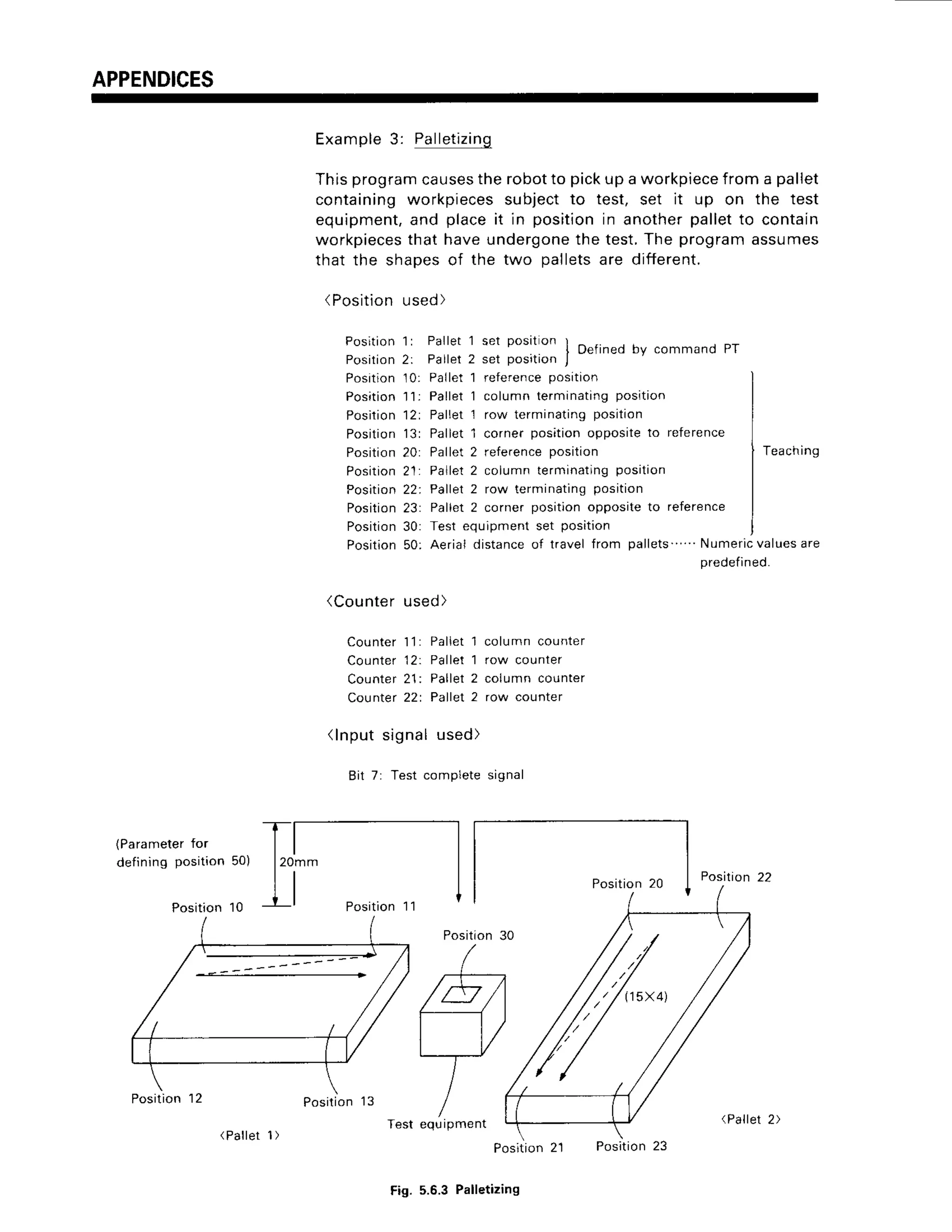
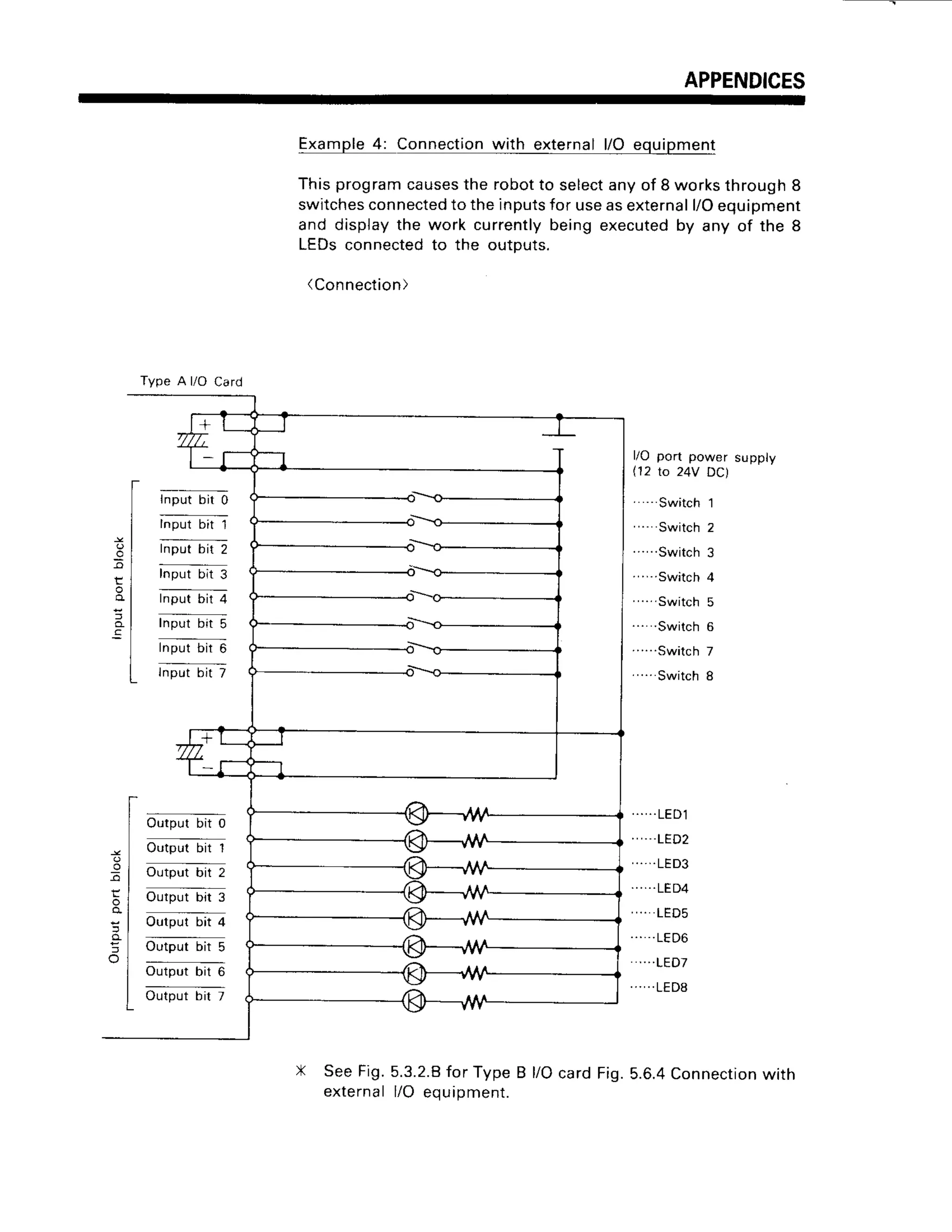
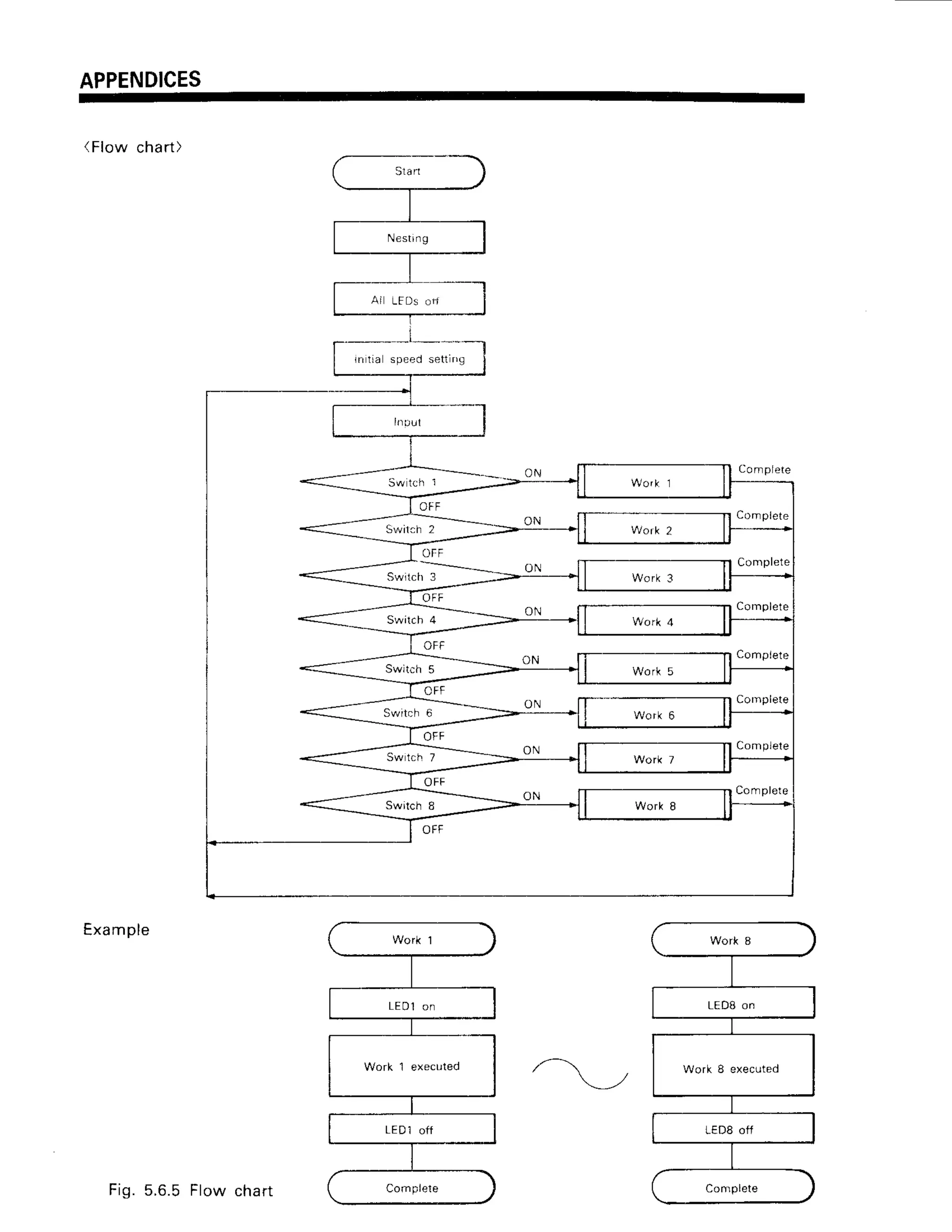
![APPENDICES
7. COMMANDLIST ]A Position/Motion
ControlInstructions
Program yes - Possible
no Nol possib e
Input Format Function Program Remarks
,] Decrement Posllion D P
Mov€s robol to a predefined
position wlth a posrton n|lm_
b e r s m a l l e rt h a n t h e c u r r e n t
2 Draw
Moves hand end to a position
awav trom the current one
covef ng the dlstance sPeci-
f r e dl n X - ,Y , a n d Z - a x r s
d i r e c
3 H E a
Definesthe coordinatesoi the
current position by assigning
p o s i t l o nn u r n b e rl a ) t o l t .
1 5 a < 6 2 9
4 HO
Eslablishesthe relerenceposr-
tlon ln the carlesian coordln
5 lncremenr Position I P
Moves fobot to a Predelinecj
position with a posrlron num
ber greater lhan the current
6 Move Approach MA aj, a, [, OiC]
Moves hand end from lhe cur
rent pos tron lo a posll on
away frorn position laL)in n
crem€ntsas speofled for posl'
t i o n ( a r ) .
1 = a j , a , = 6 2 9
O : H a n d o p e n e d ;C : H a n d
7 fvlove Cortinuous M C a r , a ,
Moves robot coritlnuous Y
through predefinedinlermedi
ate po nts Detween postlon
n u m b e r s ( a r) a n d ( a , ) .
1 1 a 1 , a 2 < 6 2 9
8 Move Joint
Turns each ioint the specified
angle from the current Posi_
I MO a L OiCI
M o v e s h a n d e n d t o p o s t i o n
( a )
1 5 a = 6 2 9
O: Handopened;
C: Hand
1 0 Move Position
Moves hand end to a Posrtlon
whose coordLnates (pos ilon
and angie) are specifiedas x,
p , a n d
1 l Move Straight M S a , n L O i C I
Moves robot to posllion (a)
through n intermedratepornts
on a straight line,
1 = a 5 6 2 9
1 5 n 5 9 9
O: Handopened;
C: Hand
12 MT a, b [, O/C]
Moves hand end frorn the cur
rent posrl on 10 a pos llon
away from a specifiedposllion
{ a ) l n i n c r e m e n t a l d l s t a n c e
b i n
the too direction.
1 5 a 5 6 2 9
O: Handopened;
Ci Hand
1 3 Nest NT
Returns robot lo rnecha
nlcaI
o r L g
I n .
't4
Origin OG
Moves robol to the reterence
positlon in the cartesrancoor
Pallet Assign PA r, j, k
Defines the n!mber of grld
points (j, k) in ihe column and
row directions for pallet (i).
1 = i 5 9
1 < j , k 5 2 5 5
Posrlion Clear P C a , , [ , a z ]
C l e a r sa l l p o s i t o n d a t a l r o m
posrlron ar ro 42.
a 1 S a 2
1 < a 1 ,a , < 6 2 9 ( o r a 1 : 0 )
1 1 Positron Define P D a , x , y , z , p , l
Defines the coordirlates(x, Y,
z, p, r) of position {a).
l 5 a = 6 2 9](https://image.slidesharecdn.com/movemasterrobot-210420203455/75/Movemaster-robot-240-2048.jpg)
![APPENDICES
Name Input Format Function Program Remarks
1 8 Position Load
Assigns the coordinates of
p o s i t l o n( a r )t o p o s t i o n ( a 1 ) 1 5 a r , a , 5 6 2 9
1 9 Pallet
Calculates
the coordinatesof a
g r i d p o l n t o n p a l l e t { a ) a n d
idenlifies the coordinates as
p o s i l i o n ( a ) .
1 5 a 5 9
20 Postion Exchange P X a j . a ,
Exchangesthe coordlnates of
position lar) for those of posi-
l i o n ( a r ) .
1 5 a 1 , a 2
1 6 2 9
21 Shift S F a l , a ,
Shiftsthe coordinatesof posi-
tion (ar) in increments repre-
senting the coordlnates of
posi|on (ar) and redefinesthe
new coorornales.
1 < a r , a , 5 6 2 9
22 Speed SP a L H/Ll
Sets lhe operating velocity
and acceleration/deceeration
lime for robol.
0 : l M i n i m u ms p e e d ; 9 : M a x -
imum speed
0 5 a 5 9
H: High acceleration/decel-
eration time; L: Low accel
eration/decelerationtime
23 Timer Tl a
Halts motion for time (a)
( U n l t : 0 . 1 s e c o n d )
0 5 _ a 3 3 2 1 6 1
24 Tool T L a
Establishes the distance be-
tween hand rrounting surface
and hand elld.
0 S a S + 3 0 0 . 0
Unit:mm
IBl Progr"rnControlInstructions
Name Input Format Function Program Remarks
25 Compare Counter C P a
Loads va ue n counter (a) into
the lnternal register.
I 5 a 5 9 9
26 Disable Act D A a
Dlsables
interruptby a signal
throughbit {a)of externalin-
pu1lerrnrnal.
0 5 a 5 7 { 1 5 )
27 Decrement
Counter D C a Decrementscounter (a) by 1 I < a 5 9 9
2A Delete Line D L a r [ , a ? ]
Deletescontents of iine num-
bers from a1 to a2.
a 1 5 a 2
1 5 a1, a2 S 2O4A
29 Enable Act EA a1, a2
Enables interrupl bv a signal
through bil (a1) of external
inpul terminal and specifies
line number (a2)to which the
program lumps wnen Inrer-
( - 1 5 ) 1 + 1 5 )
+i ON; -: OFF
1 3 a 2 5 2 0 4 4
30 E n d ED Endsthe program.
l{ Equal EOar (or &b),a,
Calses a jump to occur to llne
number (ar) if external inpul
data or counter data equals al
( o r & b ) .
| 32167)321611
0 < a1 5 255 (decimal)
0 < b < & F F ( h e x . )
(&8001)
(&7FFF)
1 3 a , 1 2 0 4 8
32 G o S u b G S a
Permlts the lnstruction sequ-
ence to iump to sub routine
which slarts with line number
( a )
1 = a 5 2 0 4 8
33 G T a
Permitsthe program sequence
t o j u m p t o l i n e n u m b e r ( a ) 1 5 a 3 2 0 4 8
34 Increment Countcr l C a lncrernentscounter (a) by 1 1 5 a 5 9 9](https://image.slidesharecdn.com/movemasterrobot-210420203455/75/Movemaster-robot-241-2048.jpg)
![APPENDICES
Name Input Format Function Program Remarks
35 lf Larger L G a 1 ( o r & b ) , a ?
causes a iump to occur to Ine
number {ar) if external inpul
data or counter data ts greater
t h a n a 1 ( o r & b ) .
l-32761) 132161l
0 5 a1 < 255(decmal)
0 < b 5 & F F ( h e x . )
(&8001)
(&7FFF)
1 < a 2 5 2 0 4 8
36 lf Not Equal NE ar (or &b),a,
Causesa jump to occur to llne
number {ar) if externai inPut
data or counter data does not
e q u a l a l ( o r & b ) .
l-32161) 327671
0 < aj 5 255 (decimal)
0 5 b 5 & F F ( h e x . )
(&8001)
l&7FFFl
1 S a r 5 2 0 4 8
Deletesall program and posi
tion data in RAM.
38 NX
Specifiesthe rangeof a loop ln
a program execlrted by corn-
m a n d B C .
39 Repeat Cycle R C a Bepeatsthe loop specified by
c o m m a n d N X { a ) l i m e s .
1 5 a 3 3 2 1 6 7
40 Bun R N a 1 L a , l
Executes line numbers from
( a r )1 o ( a r ) ,( a ? )n o t i n c l u d e d
1 3 aj, a2 S 2048
52 Return RT
Completes subroutine actr-
vated by command GS and
returns to main program,
42 Set Counter SC ar, [ar] Loads (a2)into counter {a1).
1 < ar 5 99
327613 az 5 32761
43 l f S m a l l e r sM a1(or &b),a,
Causesa jump to occur to line
number (ar) if external lnput
data or co!nter data is smaller
t h a n a 1 ( o r & b ) .
-32161) 1327671
0 < ar 5 255 (decimal)
0 < b 5 & F F ( h e x . )
(&8001)
(&7FFF)
1 3 a 2 < 2 0 4 4
@ XanCControlInstructions
Input Format Function Program Remarks
44 Grip Close Closes hand grip.
45 Grip Flag G F a
Definesthe open/closestateot
hand grip, used in conjunction
with command PD.
a - 0 ( o p e n ) ,1 ( c l o s e d l
46 Grip Open GO Opensh a n d g r i p
47 Grip Pressure G P a j , a r , a 3
Defines gripping force and
gripping force retention time.
0 5 a r , a r < 1 5
0 5 a3 < 93 (Unit:0.1
lDl l/OControl
Instructions
Name Input Format Function Program Remarks
48 Input Direct ID
Fetchesexternalsignal uncon
ditionally from input pon.
49 Input IN
Fetches external signal syn
chronously from input port.](https://image.slidesharecdn.com/movemasterrobot-210420203455/75/Movemaster-robot-242-2048.jpg)

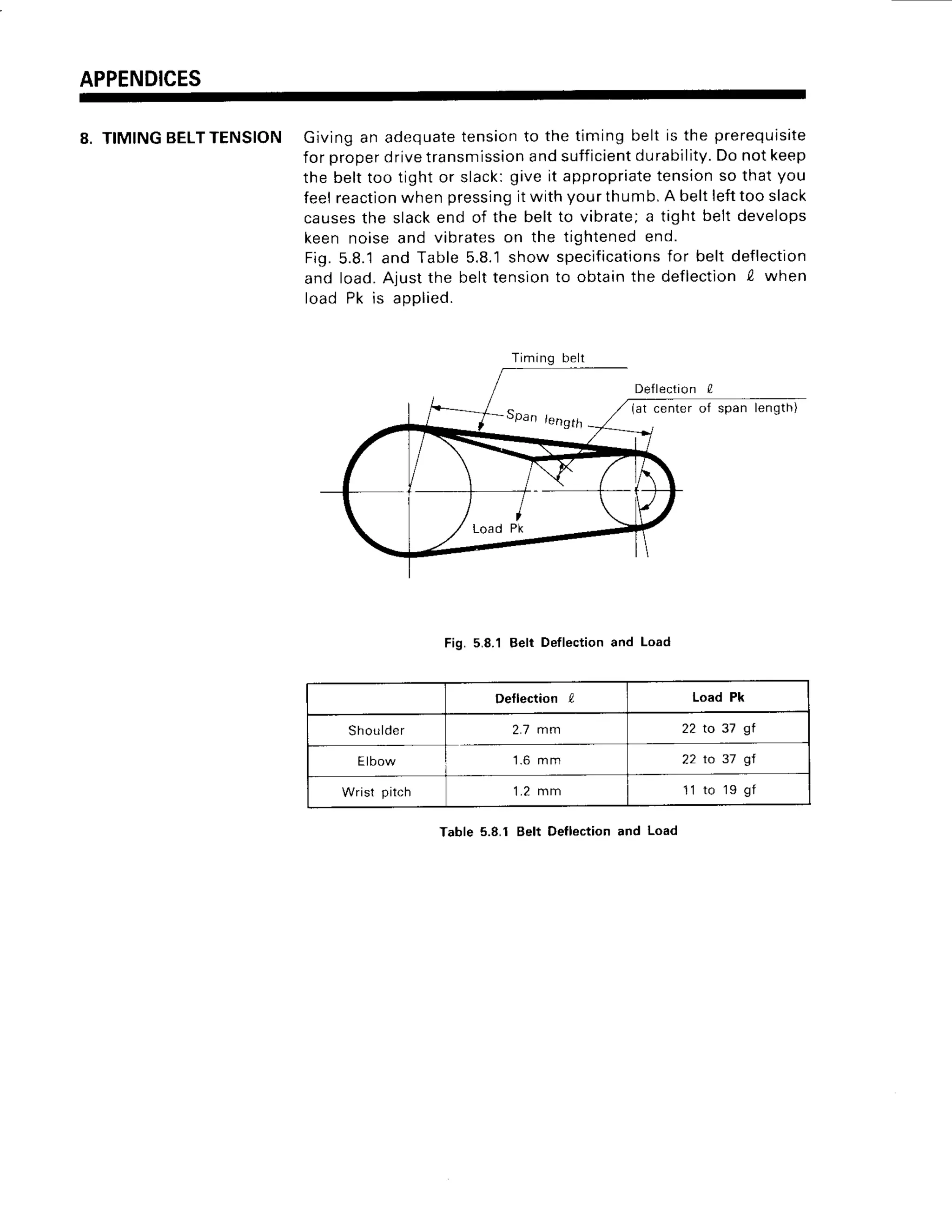
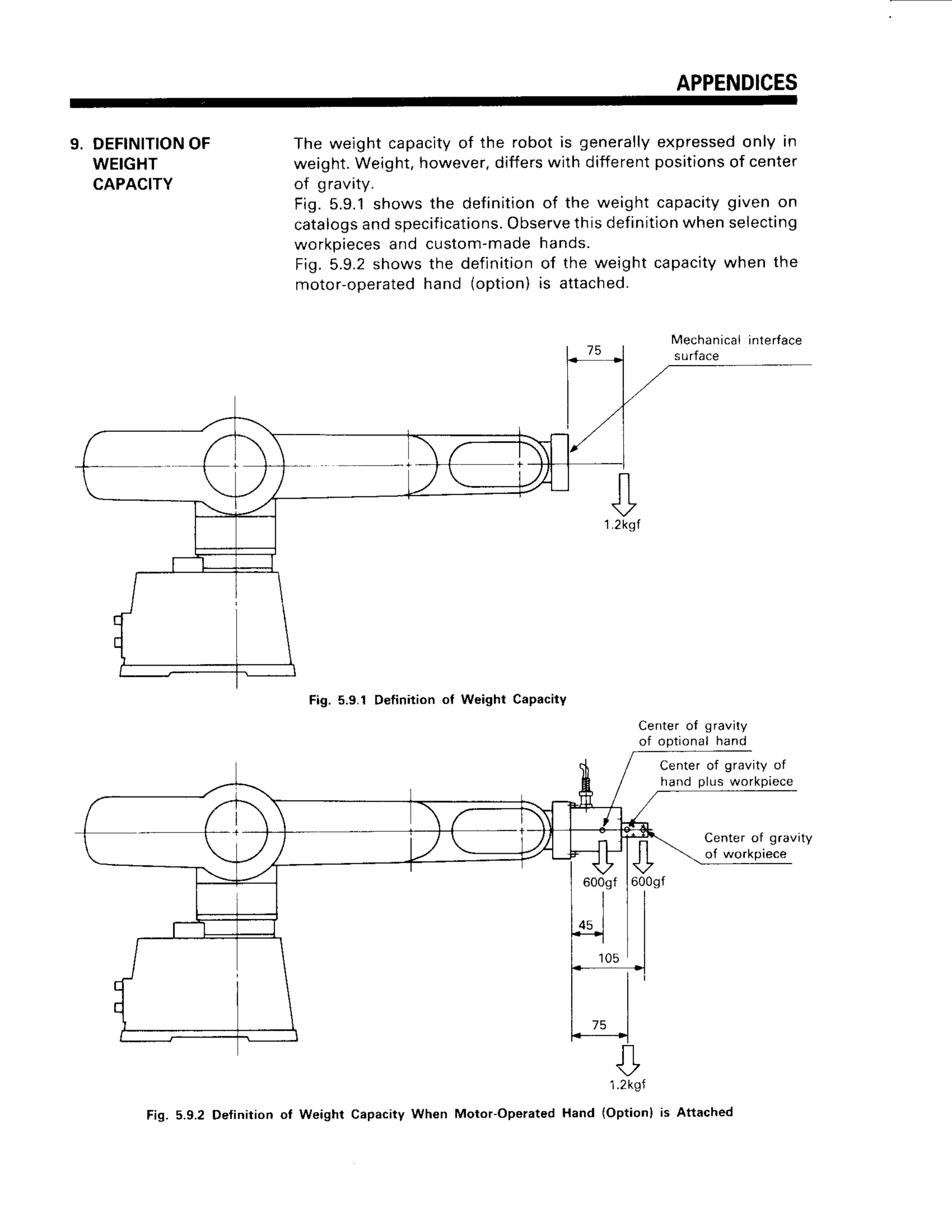
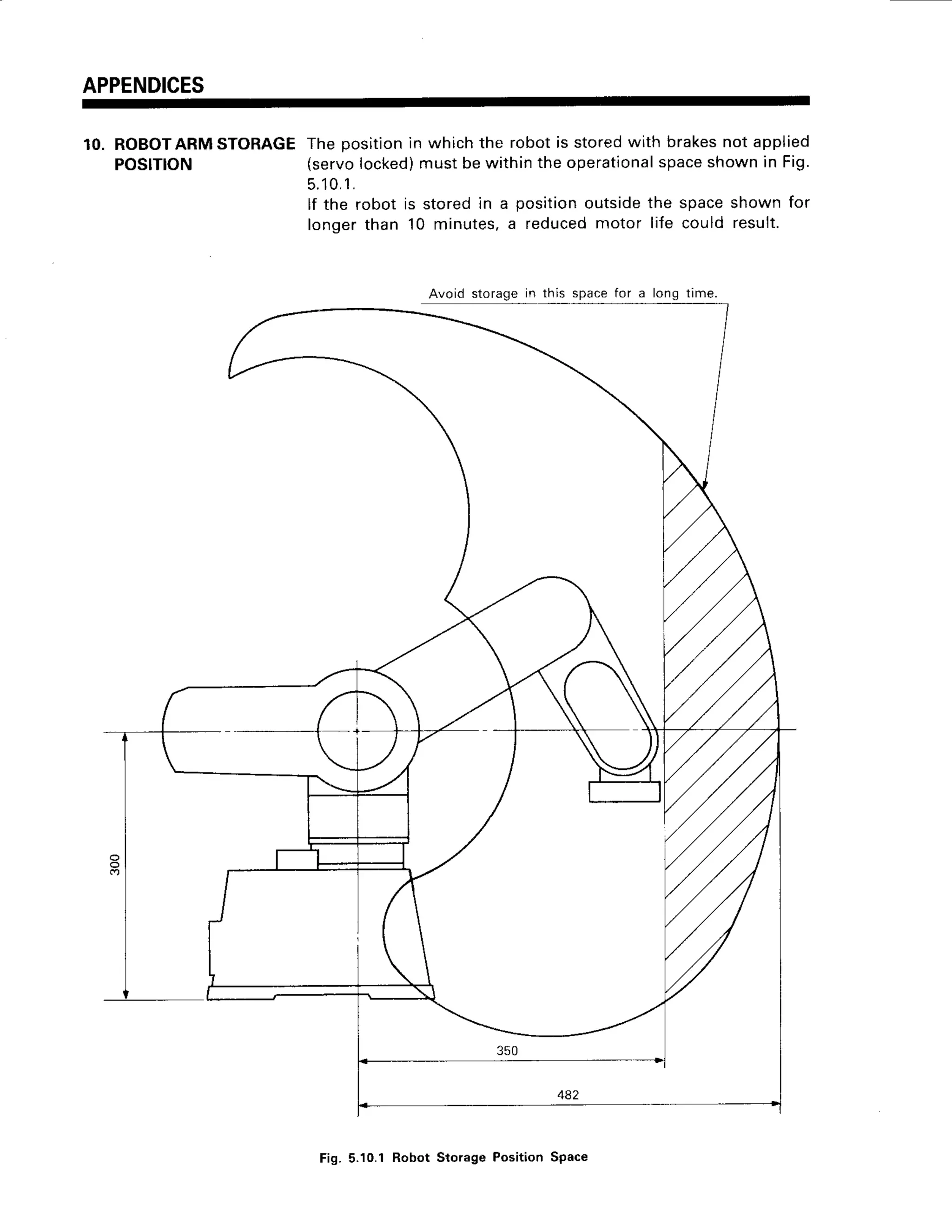
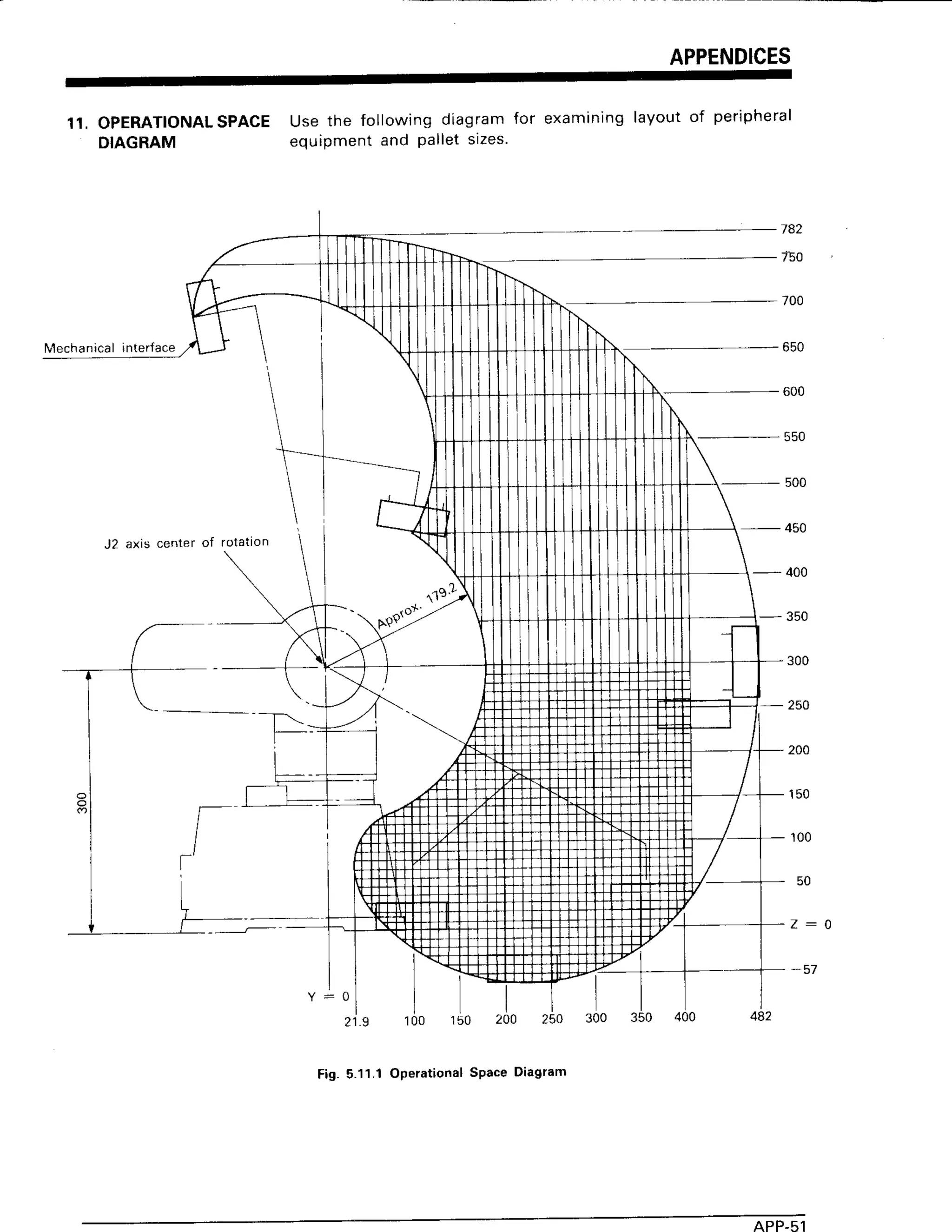
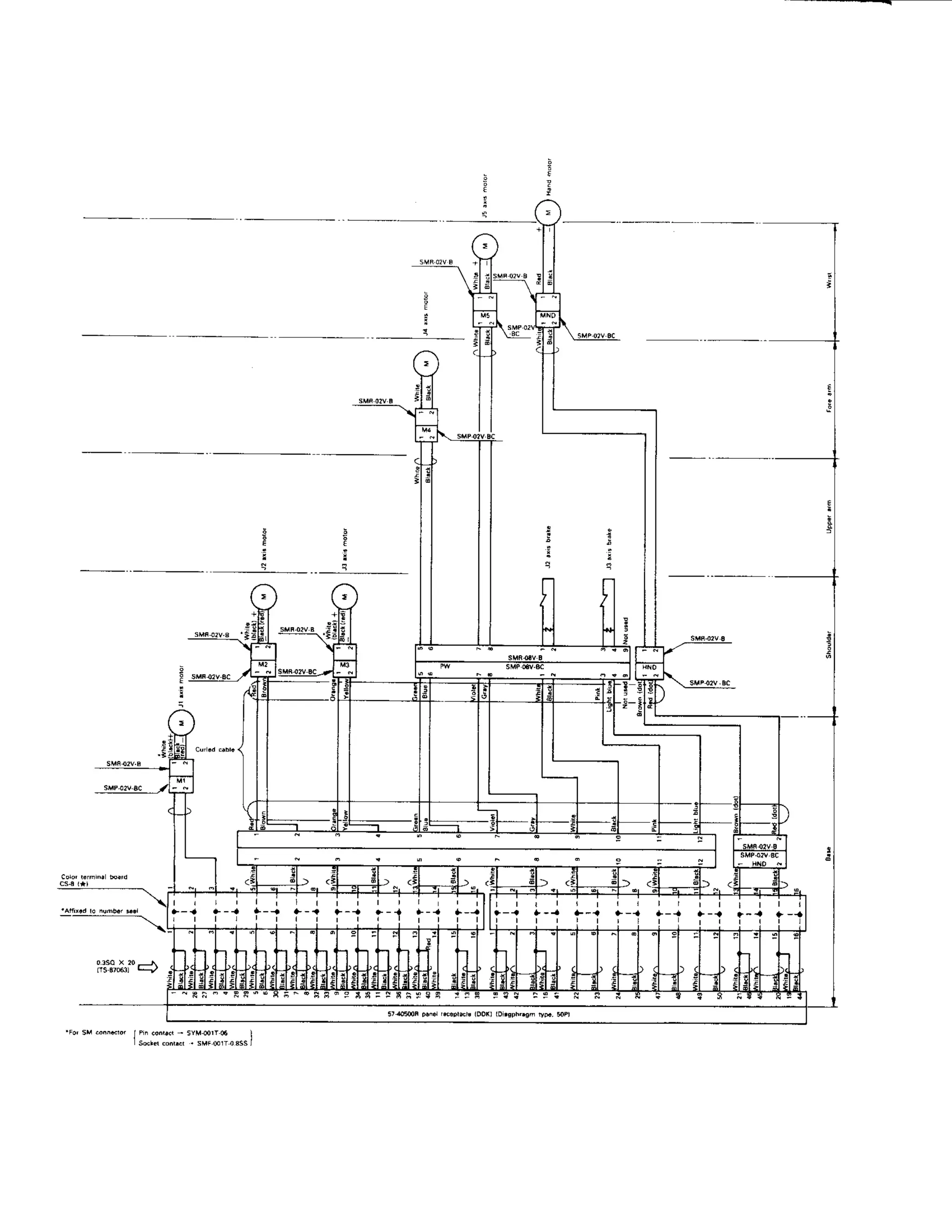
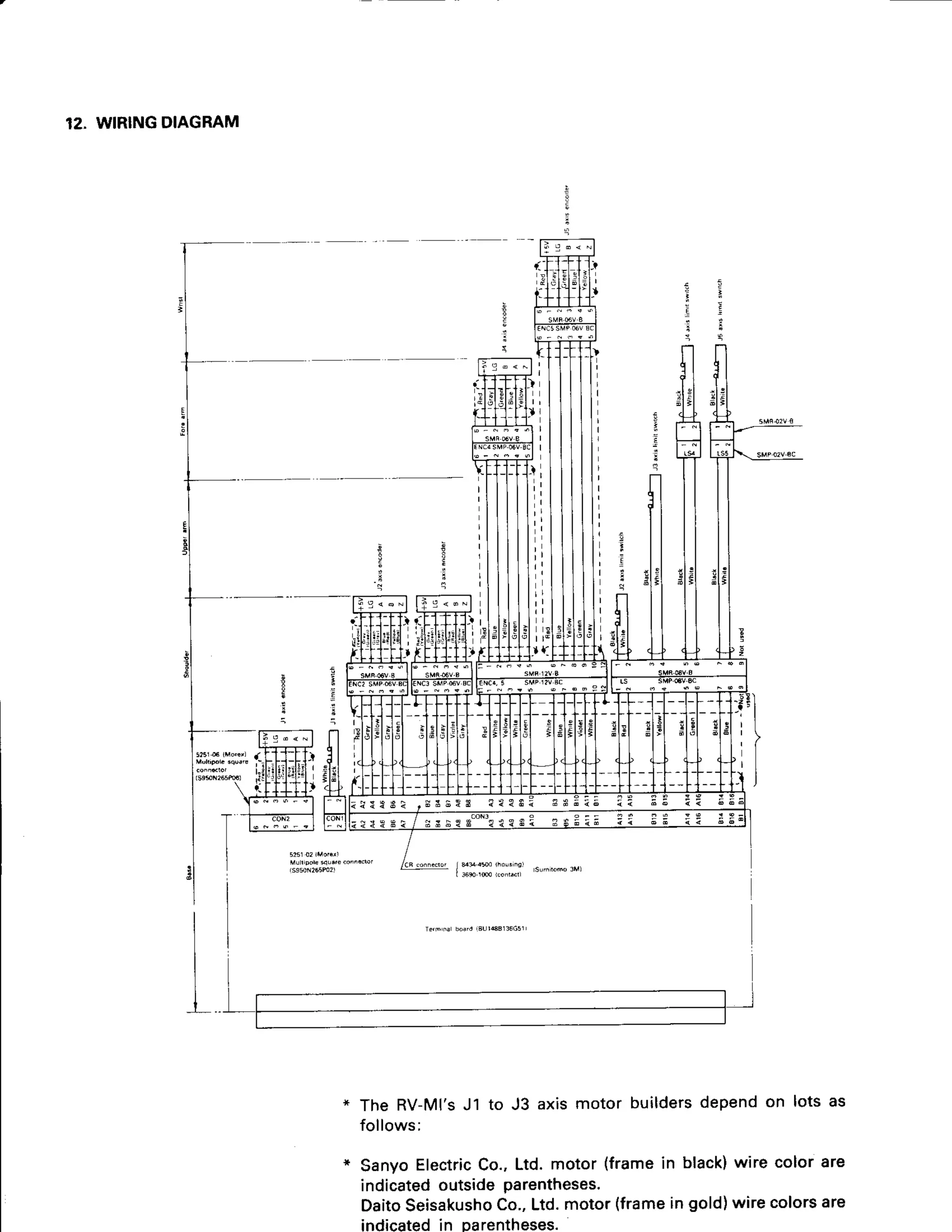
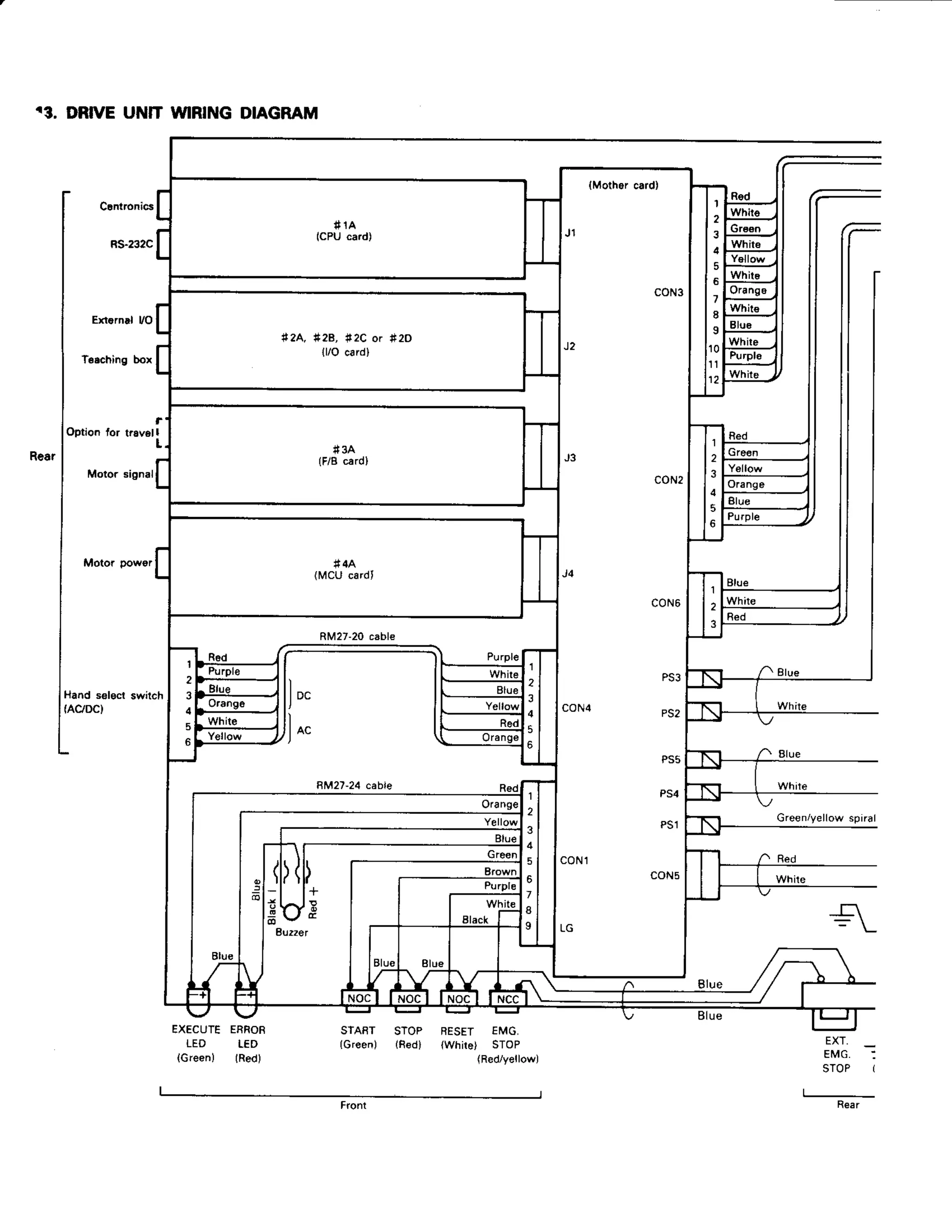
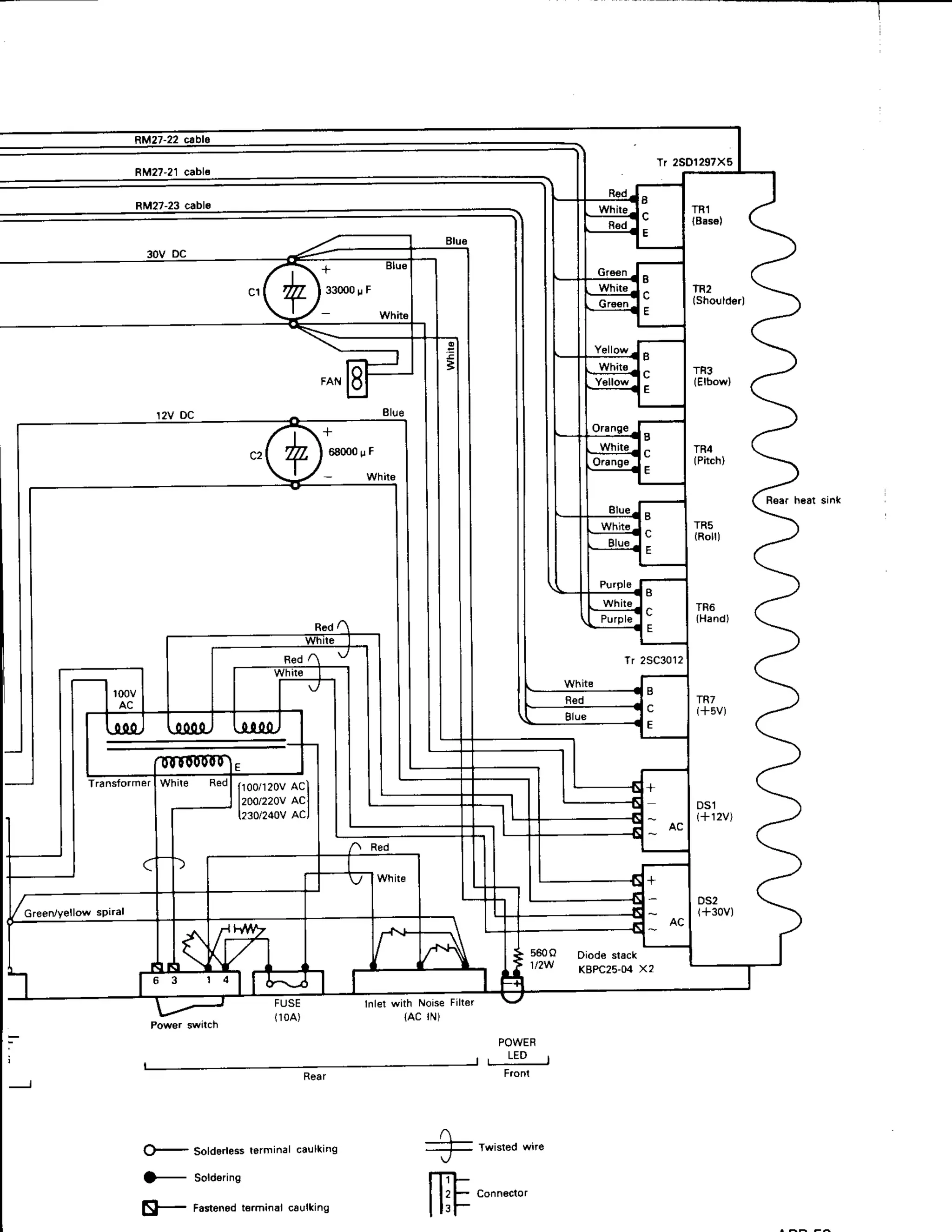
![d urrsuBrsHr
ELEcrRrc
coRpoRATroN
NEADOFFICEMITSUBSHOENKIBLDGMAFUNOUCHIIOKYOIOOIELEXJ24s32CABLEMELCOTOKYO
NACOYAWOFKS T t4 . YADA M NAMI 5 HIGASHI KI] . NAGOYA JAPAN](https://image.slidesharecdn.com/movemasterrobot-210420203455/75/Movemaster-robot-252-2048.jpg)







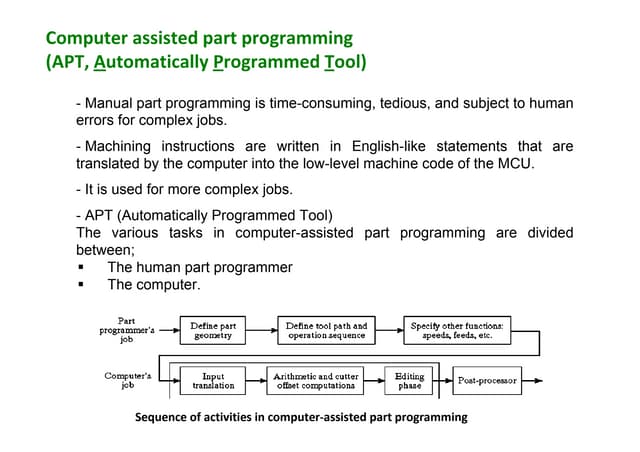




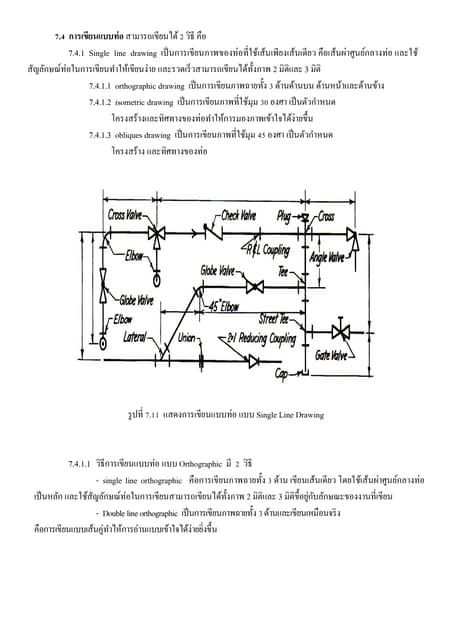




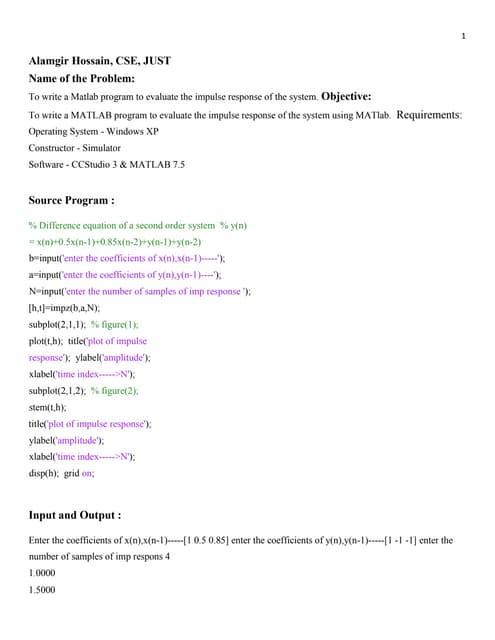





























![[DevFest Strasbourg 2025] - NodeJs Can do that !!](https://cdn.slidesharecdn.com/ss_thumbnails/devfeststrasbourg2025-nodejscandothat-251127142731-da65b6fd-thumbnail.jpg?width=640&height=640&fit=bounds)
![[BDD 2025 - Full-Stack Development] Digital Accessibility: Why Developers nee...](https://cdn.slidesharecdn.com/ss_thumbnails/fs-digitalaccessibilitywhydevelopersneedtoknowandcarein2025-251127011019-0674441d-thumbnail.jpg?width=640&height=640&fit=bounds)







![[BDD 2025 - Full-Stack Development] Agentic AI Architecture: Redefining Syste...](https://cdn.slidesharecdn.com/ss_thumbnails/fs-agenticaiarchitectureredefiningsystemcommunication-251124030838-e6c70cc2-thumbnail.jpg?width=640&height=640&fit=bounds)







![[BDD 2025 - Full-Stack Development] PHP in AI Age: The Laravel Way. (Rizqy Hi...](https://cdn.slidesharecdn.com/ss_thumbnails/fs-phpinaiagethelaravelway-251125012602-ef9d330e-thumbnail.jpg?width=640&height=640&fit=bounds)

![Support, Monitoring, Continuous Improvement & Scaling Agentic Automation [3/3]](https://cdn.slidesharecdn.com/ss_thumbnails/agenticcommunityseries-day3-cfd-251120170304-ddef8112-thumbnail.jpg?width=640&height=640&fit=bounds)