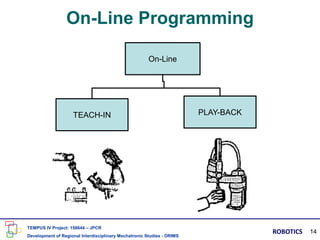
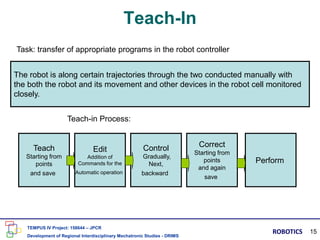
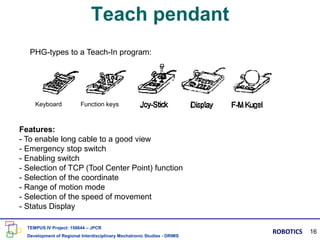
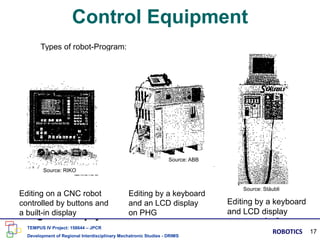
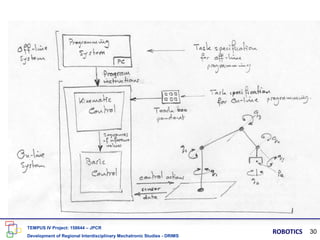
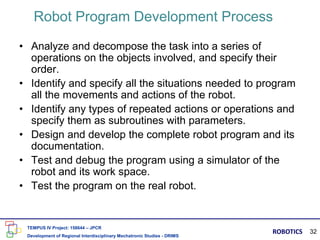
The document discusses robot programming methods including online programming techniques like teach-in and playback as well as offline programming. It covers topics such as joint-level, robot-level, and high-level programming and explains the benefits of offline programming such as reducing robot operating time and allowing programming without robot access. Offline programming is considered more productive for industry as it allows programming to overlap with robot operation.
![Review: Some Definitions
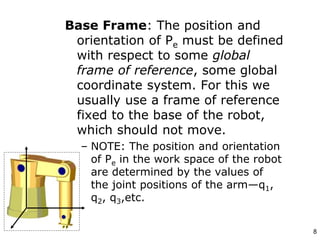
• DoF: The degrees of freedom [degrees of
mobility] of the robot will be numbered as
q1, q2, q3 etc.
– Usually industrial robot arms have between 4
and 6 degrees of freedom, one at each joint.
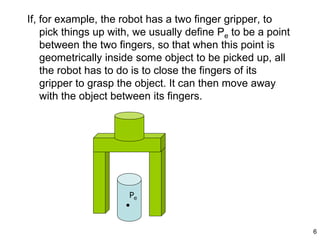
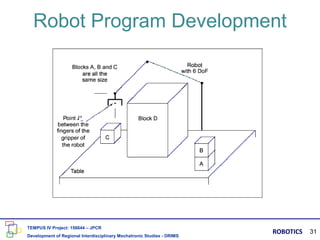
• End-effector: The end of the robot arm,
where the gripper or other tool that the
robots uses is located, we will define as
the end-point (Pe) of the robot.
TEMPUS IV Project: 158644 – JPCR
Development of Regional Interdisciplinary Mechatronic Studies - DRIMS
ROBOTICS 5](https://image.slidesharecdn.com/10programminginrobotics-230625052000-4f7f9d5e/85/10-Programming-in-Robotics-ppt-5-320.jpg)