Download to read offline

![Verification of CAN Cotroller1206/18/15
Verification Environment
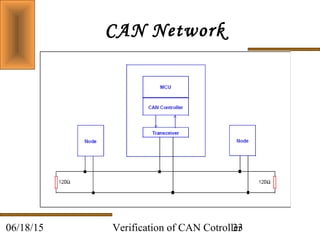
CAN Bus
Functional
Model
(BUS-EMU)
CAN Node
Emulator 1
(CAN-EMU)
DUV Tx
DUV Rx
CAN Tx
BFM_MD
CS#
INT#
WRL#
CLK
WRH#
Addr[7:0]
Data[15:0]
CAN
Controller
Device (DUV)
Micro
controller
Emulator
(MCU-EMU)
RD#
RST#
Test Cases
Response
Checker
CAN Rx](https://image.slidesharecdn.com/4efbd6c4-ad87-4510-9255-c9f3bc324e74-150618175150-lva1-app6891/85/Final_Viva_Voce_Presentation_latest-12-320.jpg)
![Verification of CAN Cotroller1506/18/15
MCU-EMU Interface
CS#
INT#
WRL#
CLK
WRH#
Addr[7:0]
Data[15:0]
CAN
Controller
Device (DUV)
Micro
controller
Emulator
(MCU-EMU)
RD#
RST#
• Configures the
DUV
• Controls the DUV
• Runs at a
programmable
frequency
• Checks RMOs
(Receive
Message Objects)](https://image.slidesharecdn.com/4efbd6c4-ad87-4510-9255-c9f3bc324e74-150618175150-lva1-app6891/85/Final_Viva_Voce_Presentation_latest-15-320.jpg)
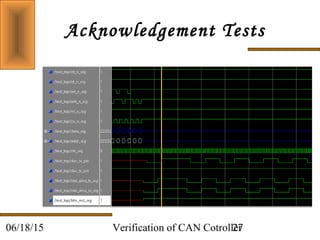
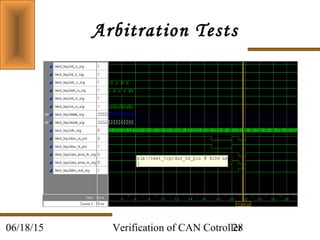
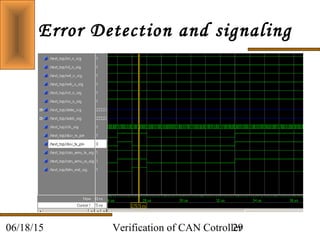
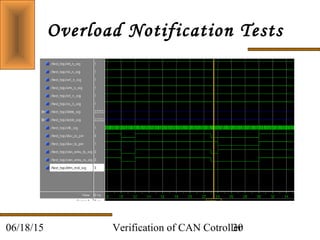

The document describes the functional verification of a CAN controller design. It discusses verifying that the design meets the CAN specification through the creation of a flexible verification environment using a combination of black box, white box and grey box verification approaches. The environment contains test cases, emulators to simulate the microcontroller and CAN nodes, and a response checker. A variety of test categories and procedures are used to verify behaviors like message framing, arbitration, error detection and signaling.















































