Downloaded 1,420 times






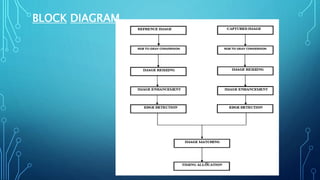

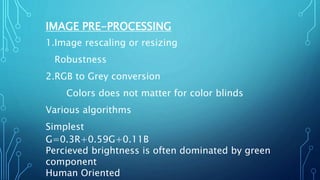
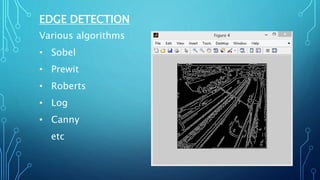

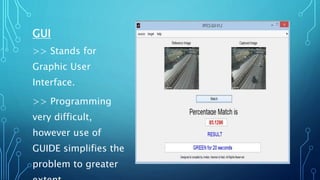

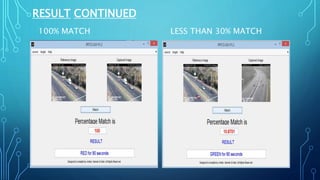


The document discusses the implementation of traffic control using image processing, highlighting its advantages over traditional methods such as reducing unnecessary signal changes. It outlines key processes including image acquisition, pre-processing, edge detection, and matching algorithms, as well as the use of MATLAB for system design. Future enhancements aim to integrate DSP for real-time applications and improve vehicle identification systems.