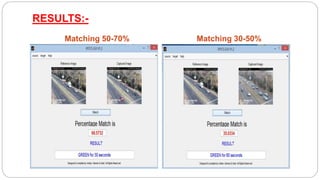
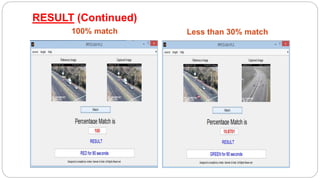
This document describes a system for traffic control using image processing. It begins with an introduction explaining traffic control using image processing and how it differs from ordinary traffic control. It then discusses the key steps in the image processing system, which include image acquisition, preprocessing such as resizing and color conversion, edge detection using algorithms like Canny, and pattern matching. It provides block diagrams and discusses using MATLAB and GUIs. Results show different levels of matching accuracy. It concludes that this method can remove problems like unnecessary green lights. Future work proposes a real-time system using DSP and vehicle identification.