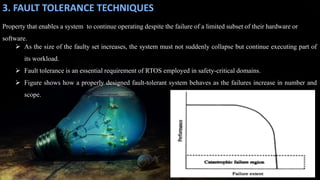
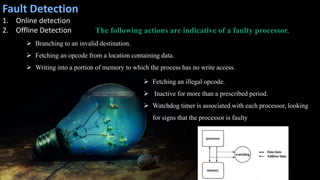
This document discusses real-time systems and fault tolerance techniques. It covers estimating program run time, task assignment and scheduling, and reliability evaluation. Fault tolerance is an essential requirement for safety-critical real-time systems. There are different types of faults including hardware, software, and errors. Fault tolerance techniques aim to allow systems to continue operating despite failures through approaches like redundancy, error detection and correction, and containment. The document provides examples of fault detection methods and discusses causes of failures.