Downloaded 1,330 times
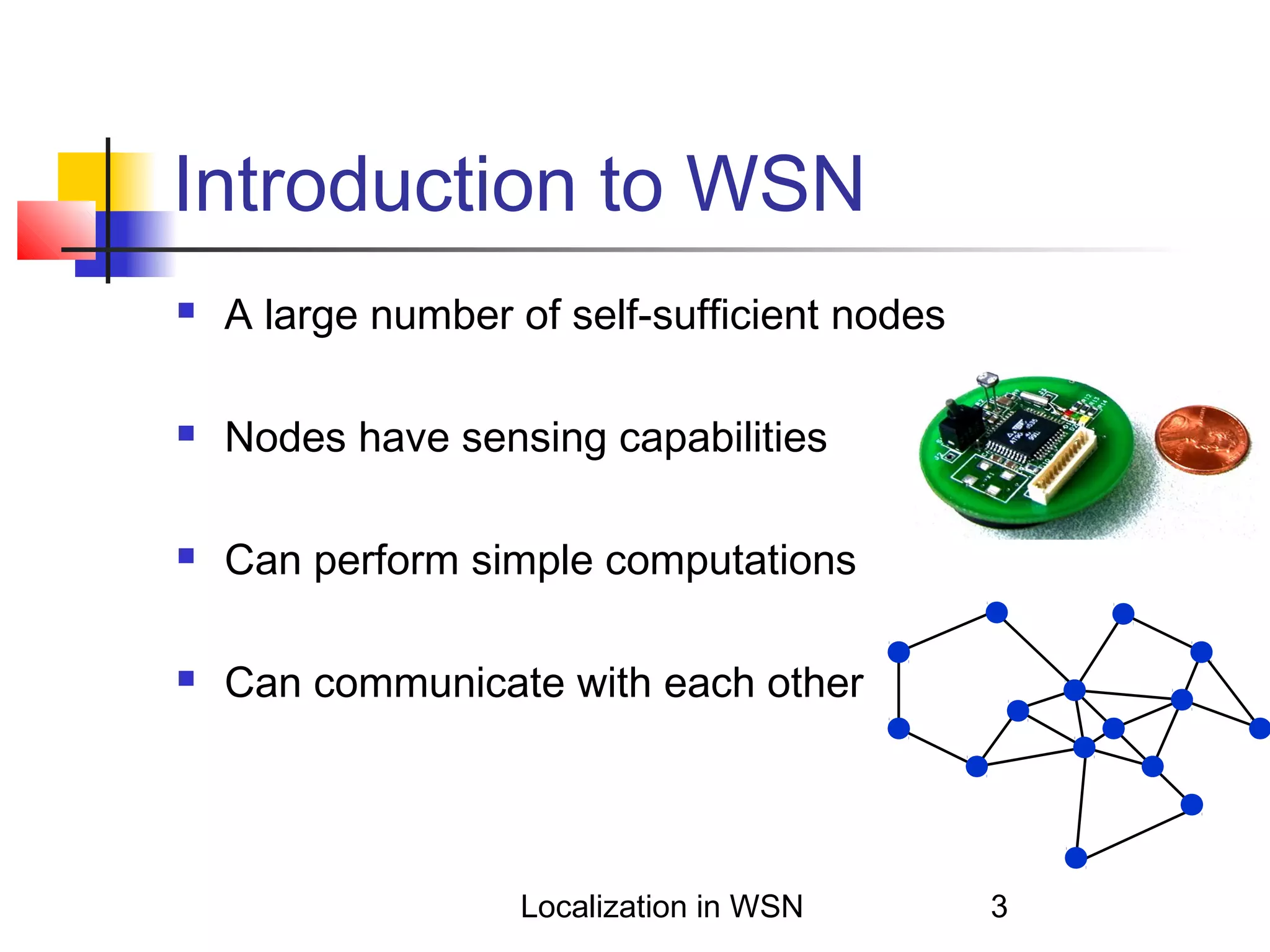
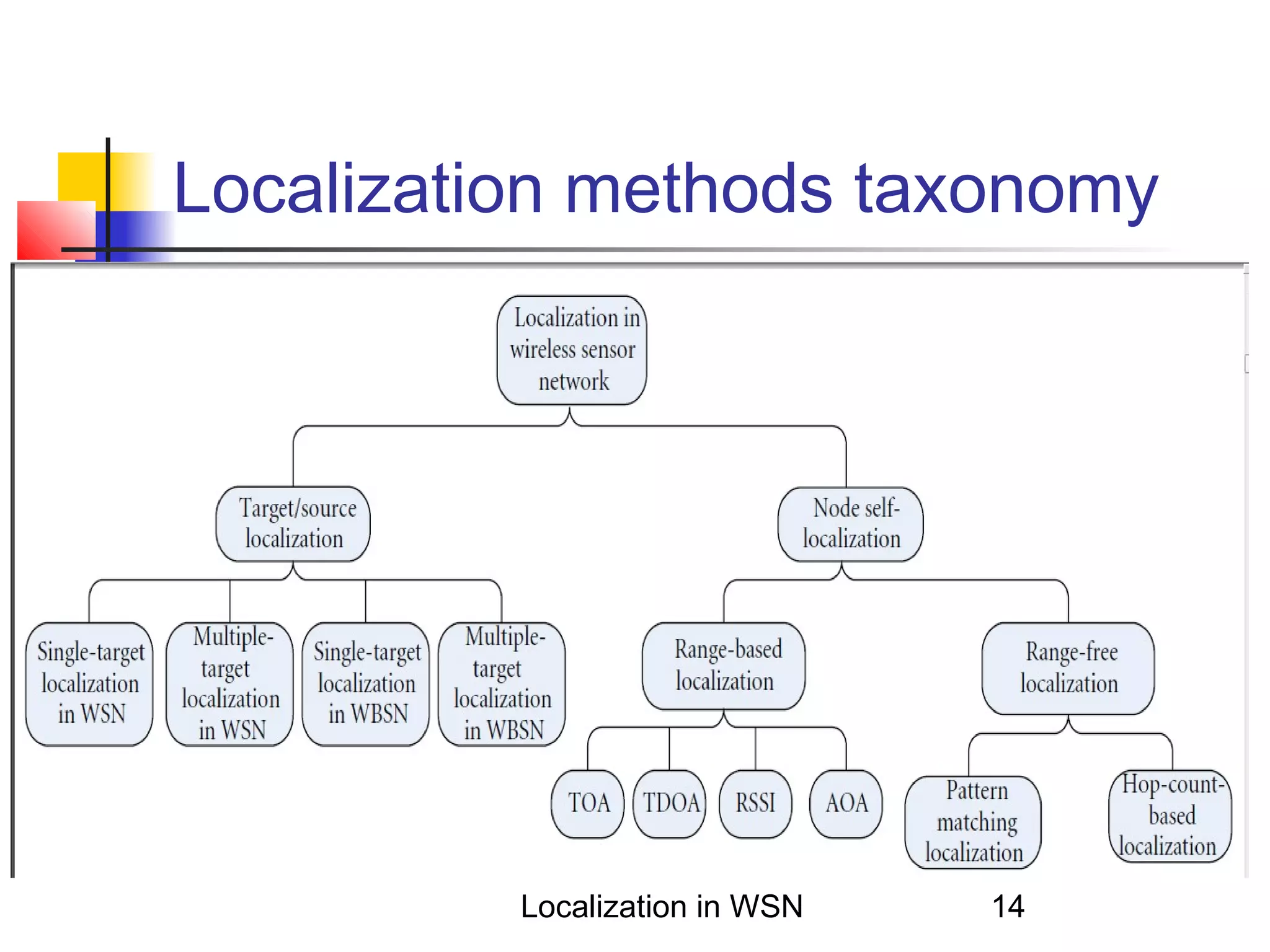
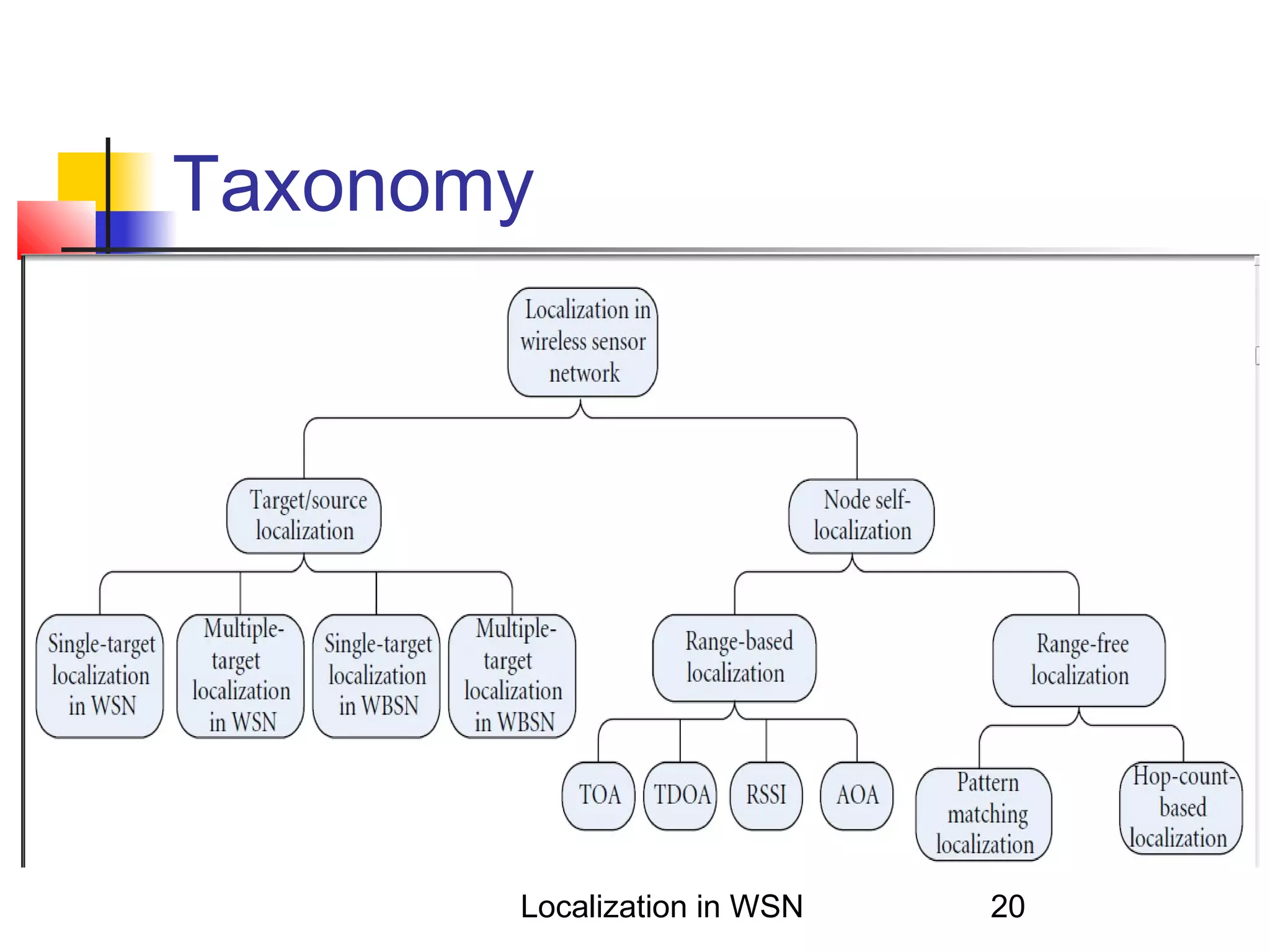
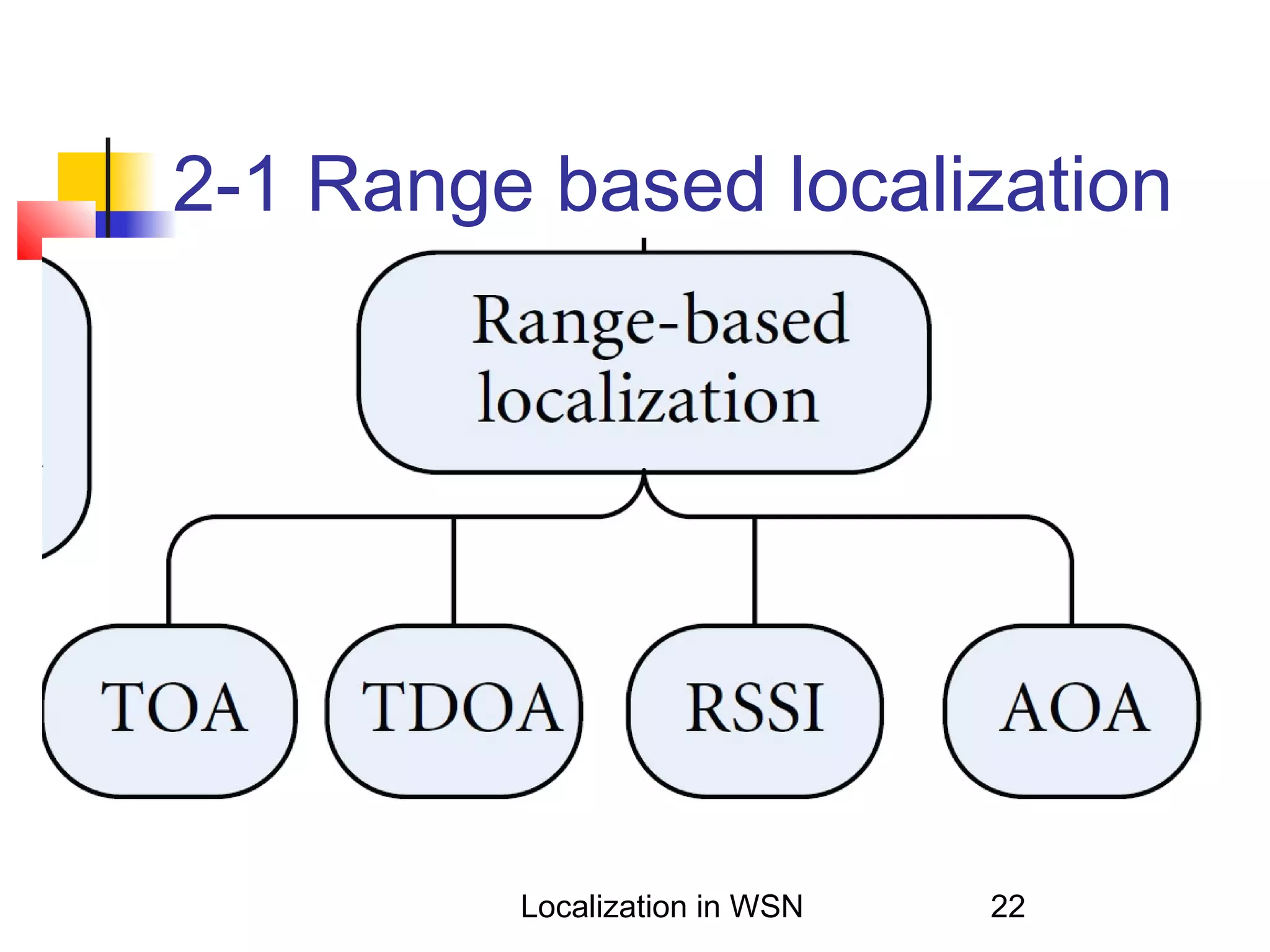
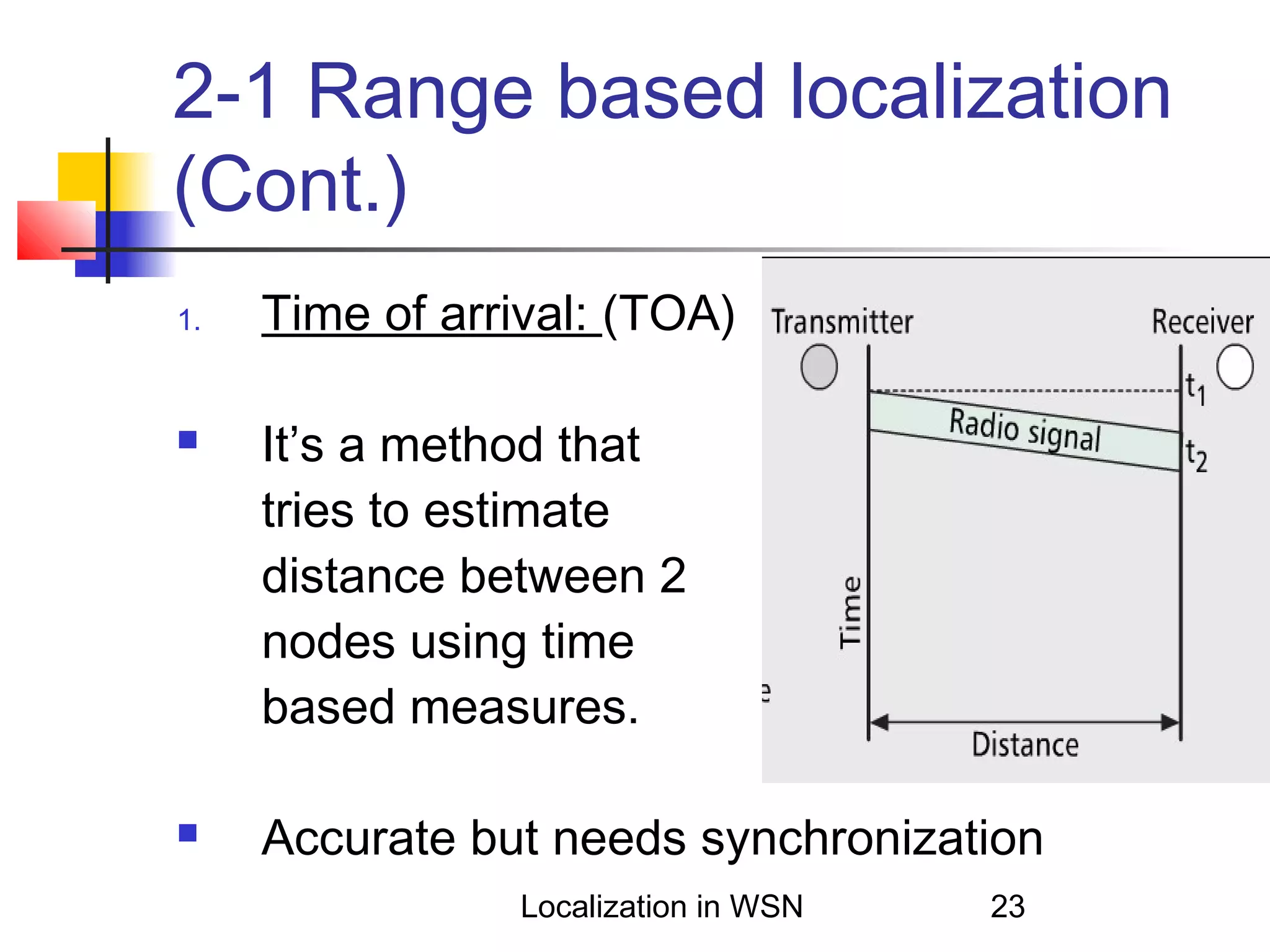
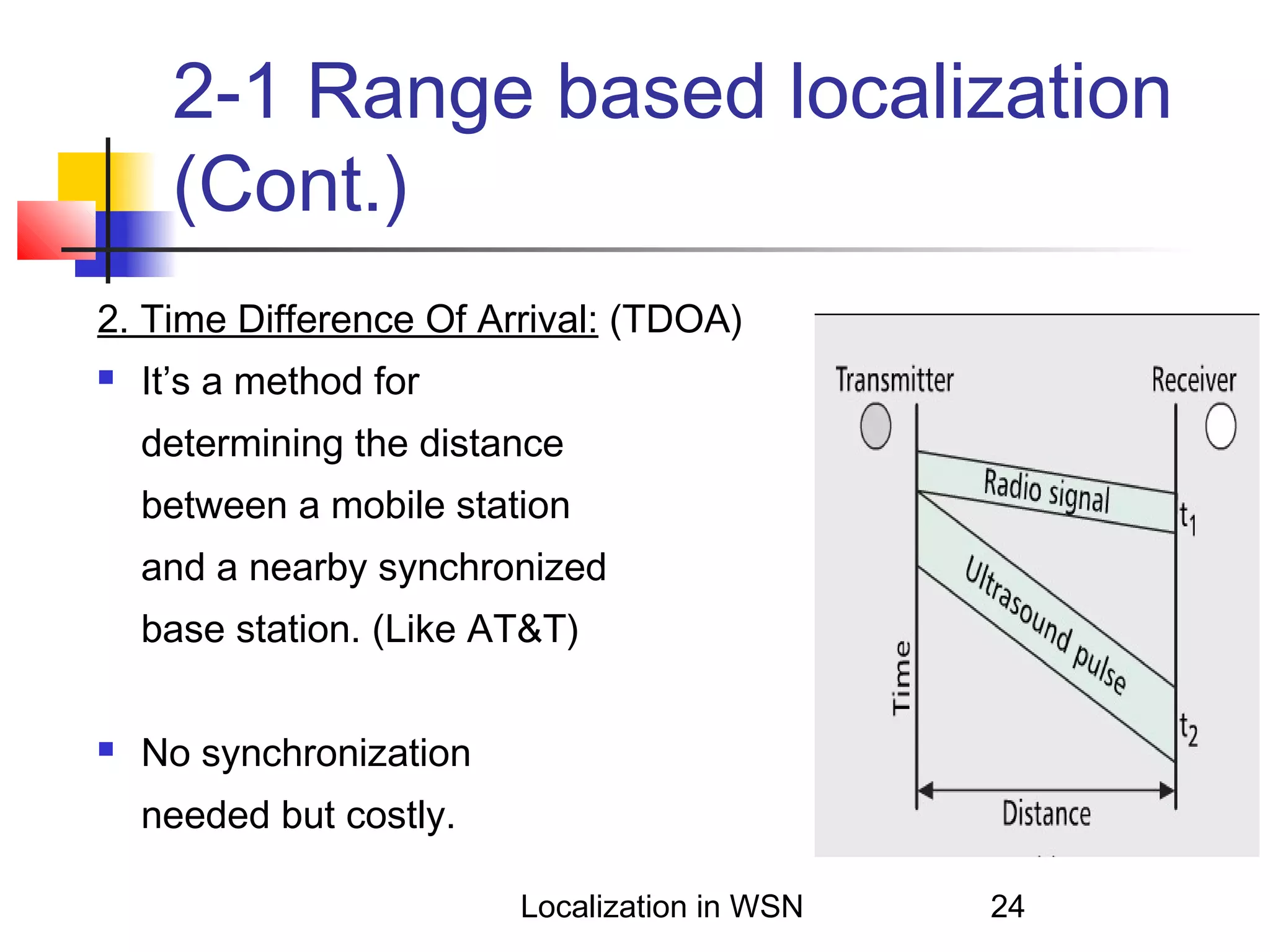
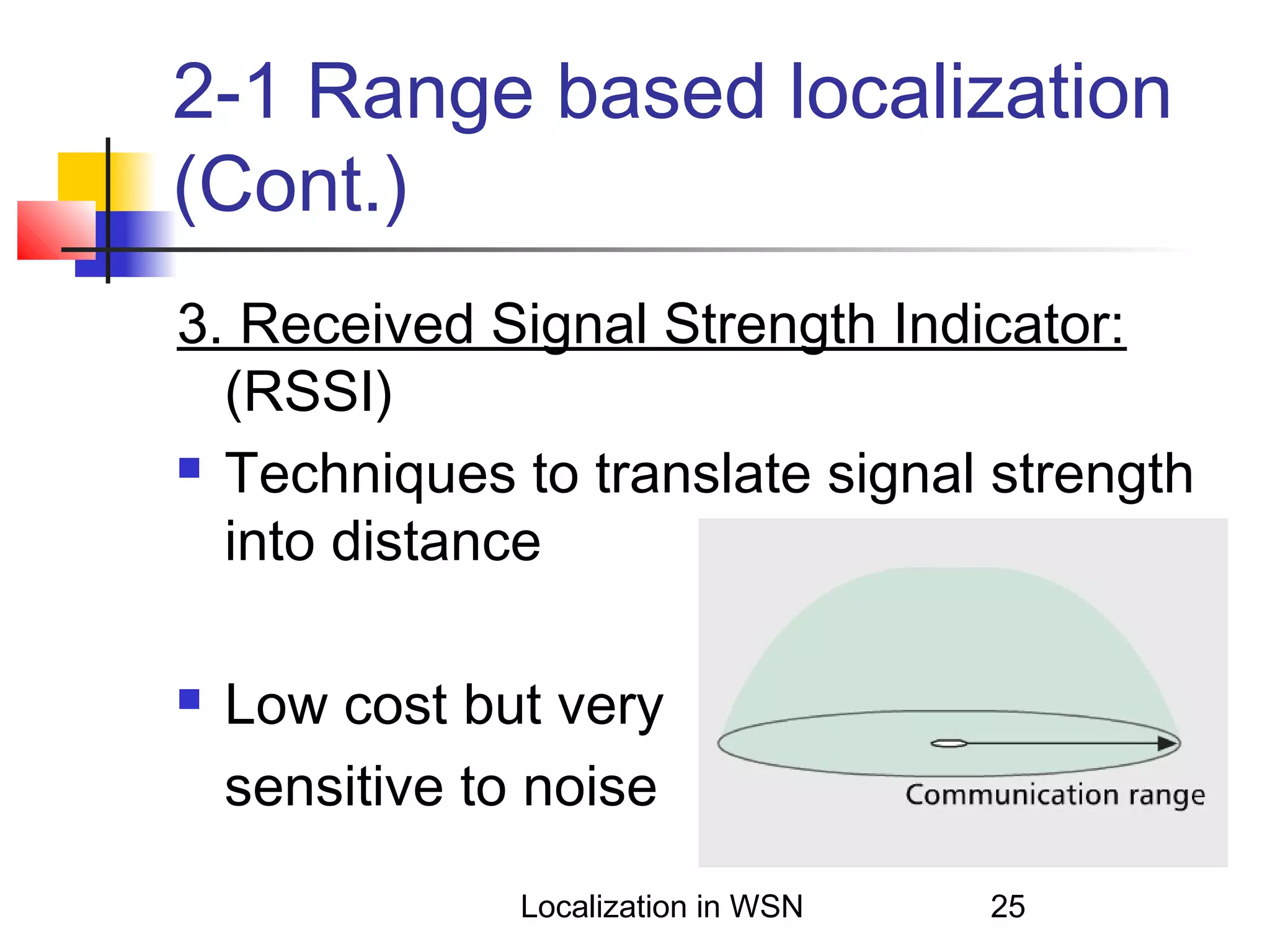
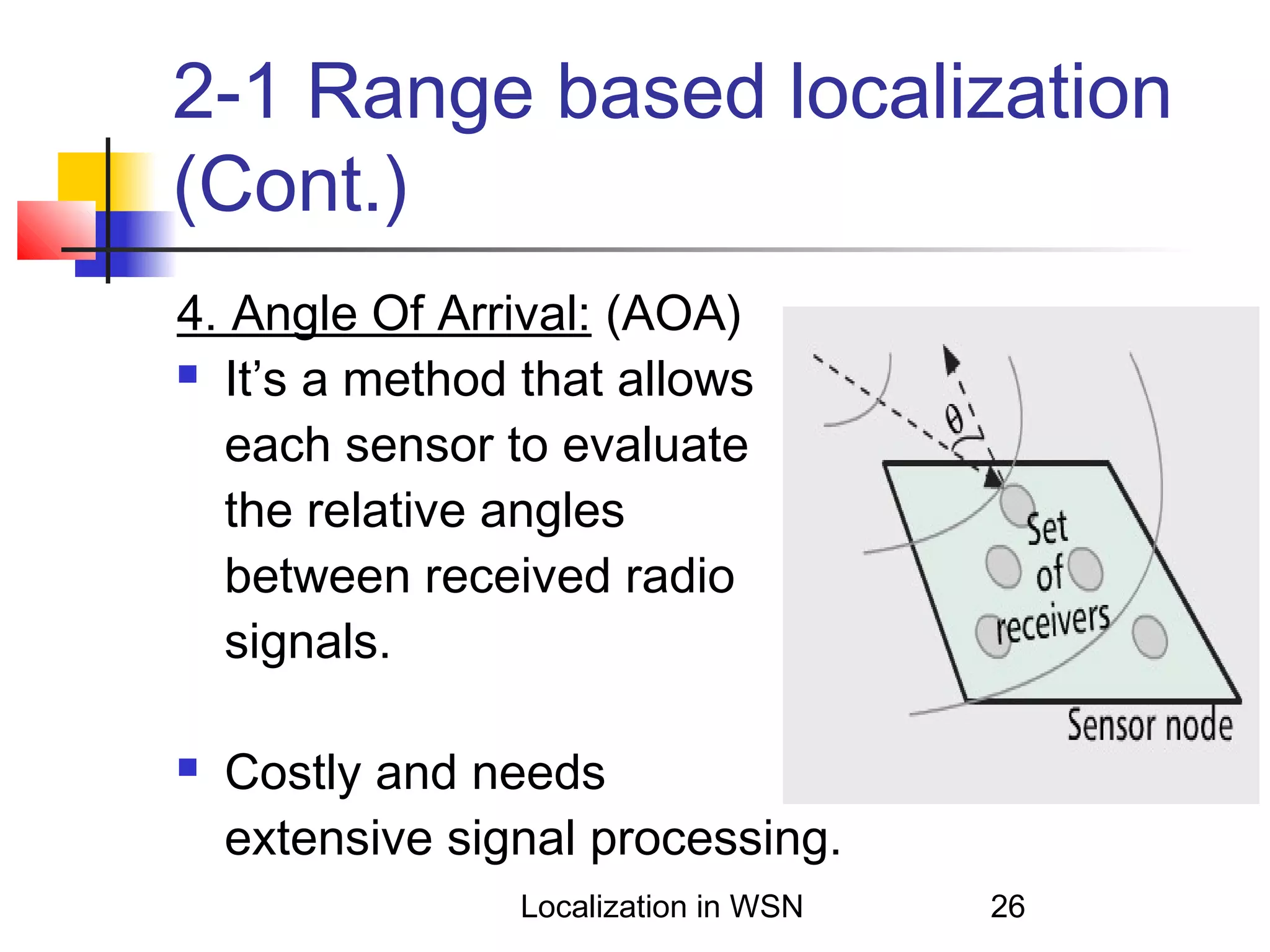
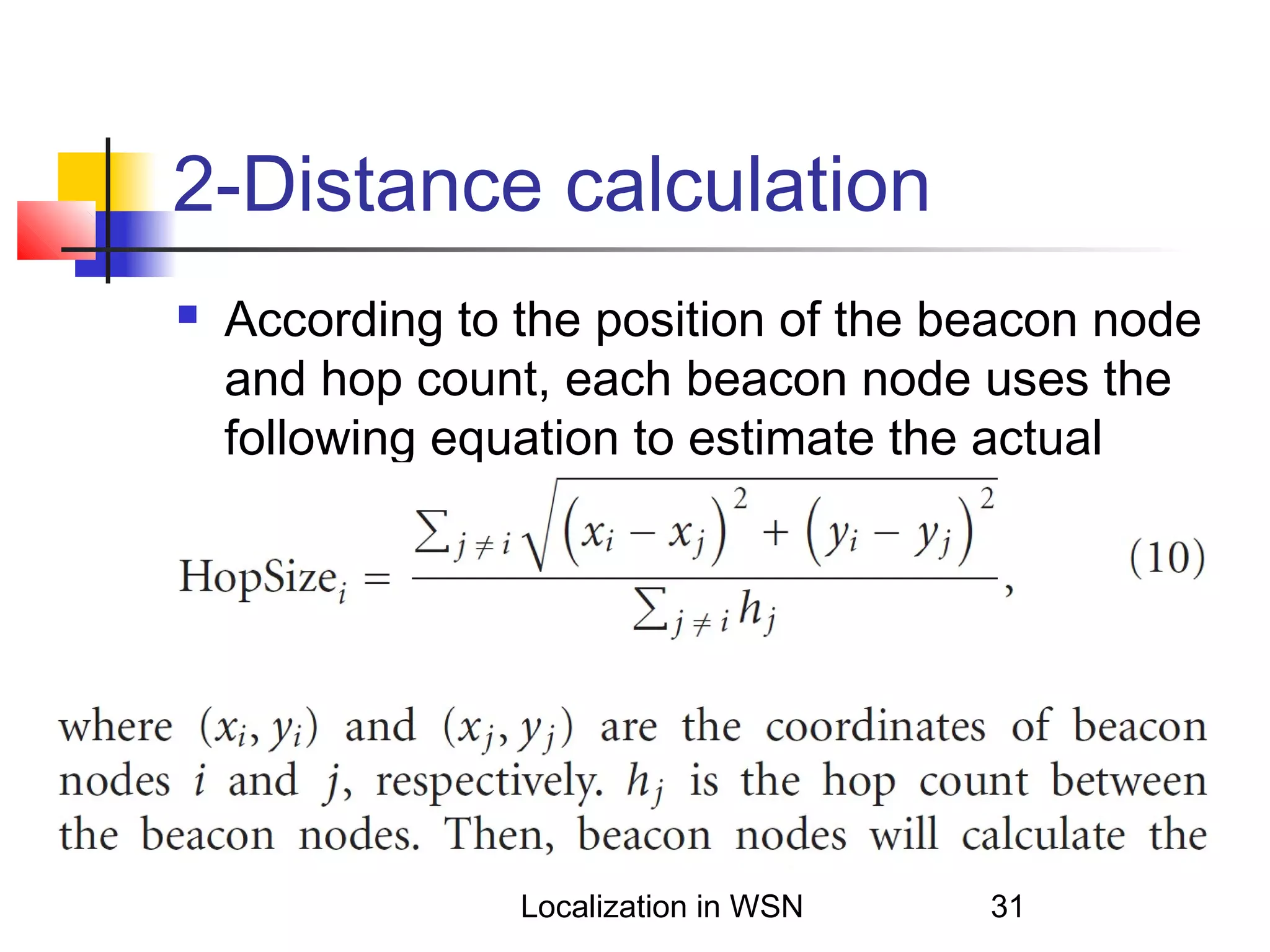
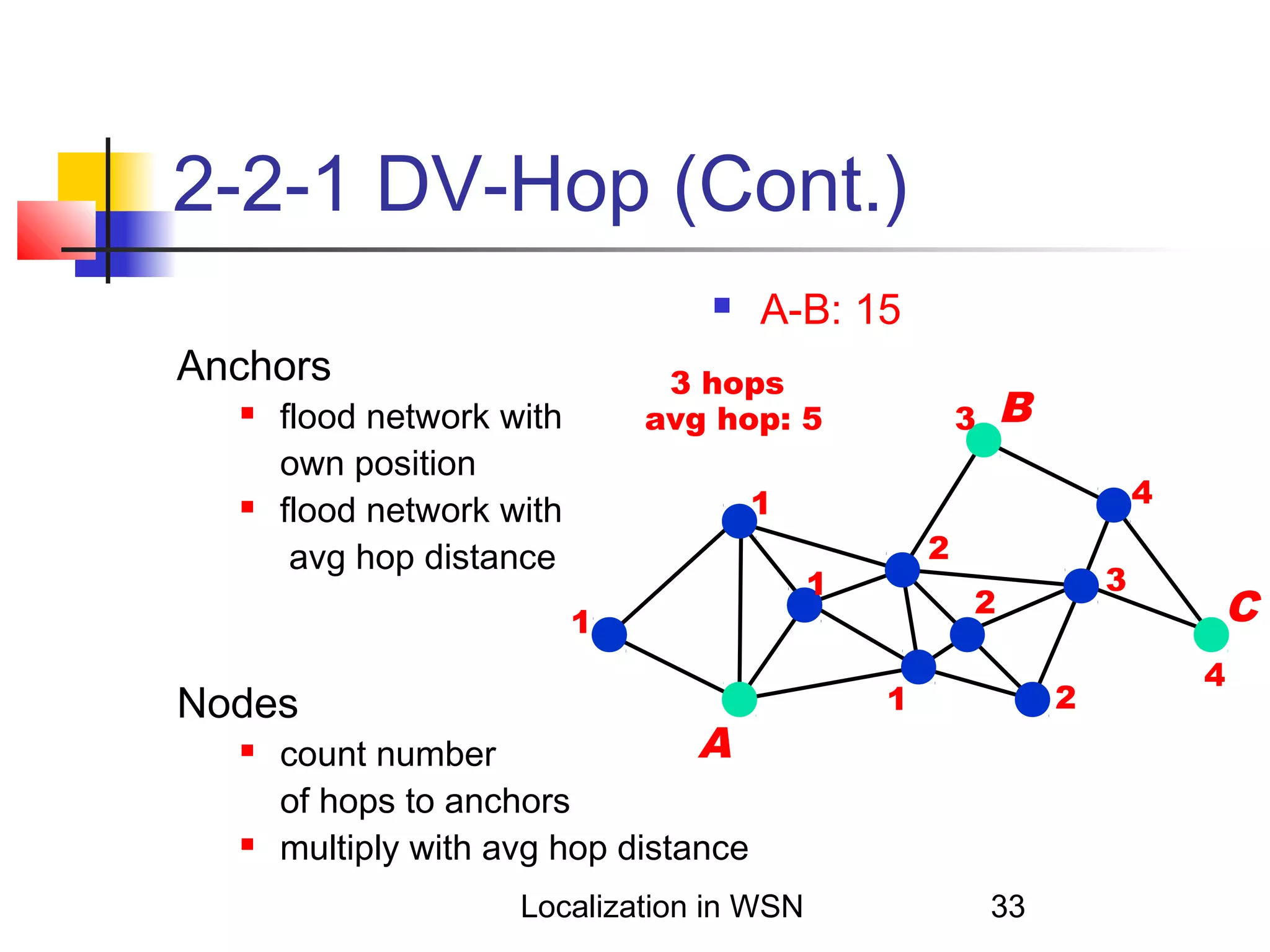
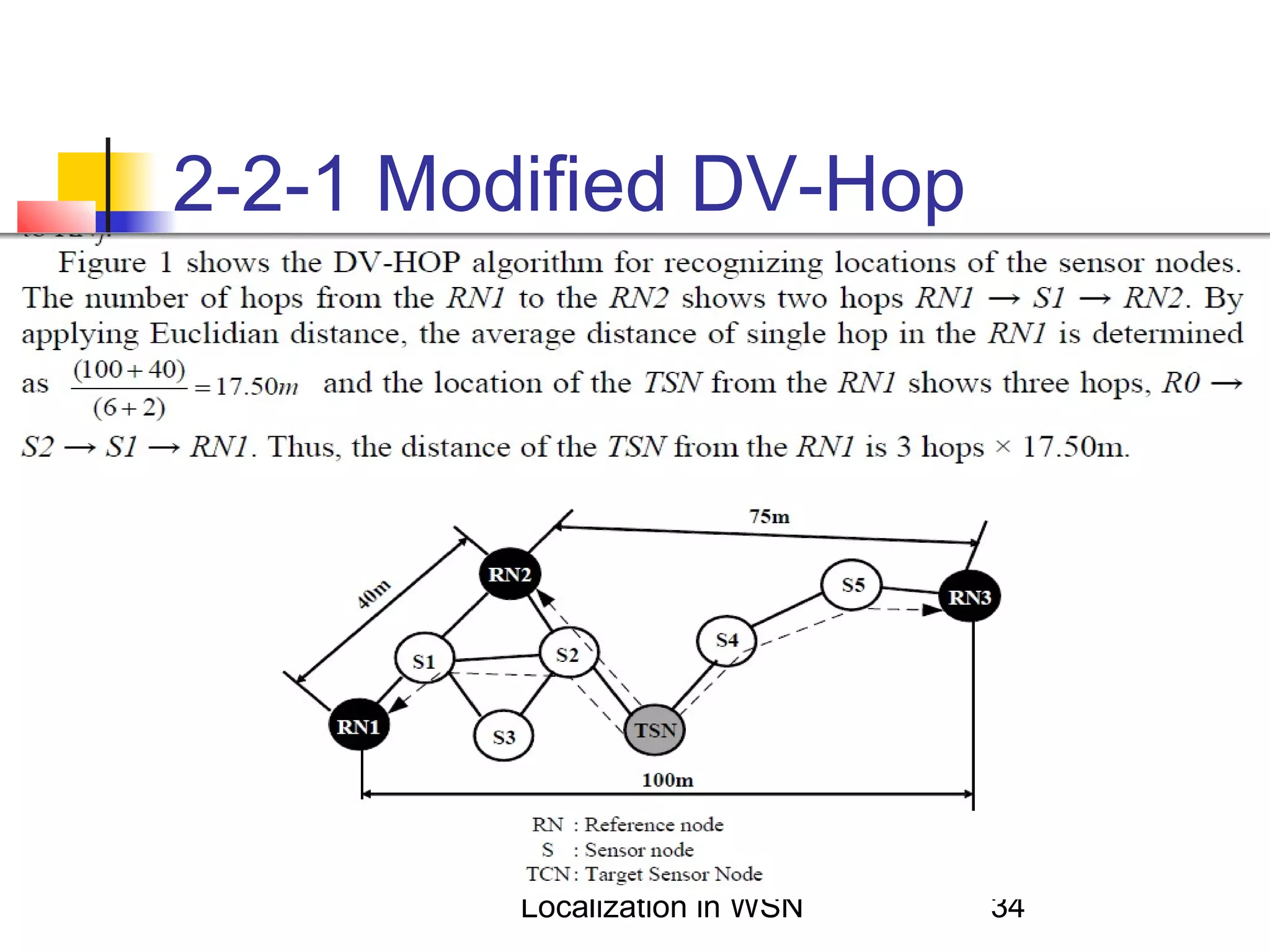
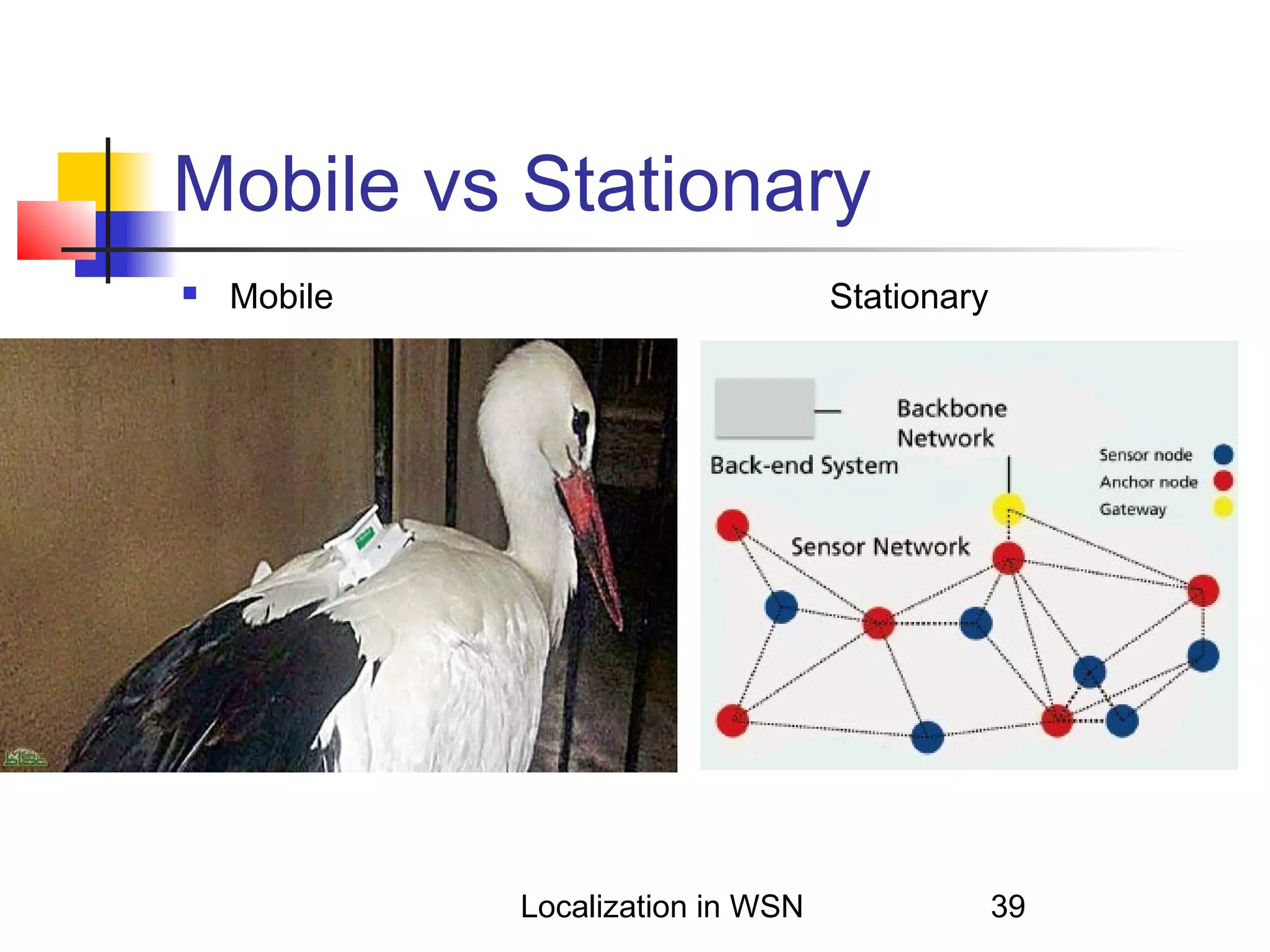

This document discusses localization techniques in wireless sensor networks (WSNs). It begins with an introduction to WSNs and their applications that require location information. While GPS could provide location data, it is not practical for WSNs due to cost and physical constraints. The document then categorizes localization methods as range-based, which use distance or angle measurements, and range-free, which do not directly measure distance. Specific techniques like time of arrival, received signal strength, and DV-Hop localization are described. The document concludes with classifications of localization methods and topics for future work.