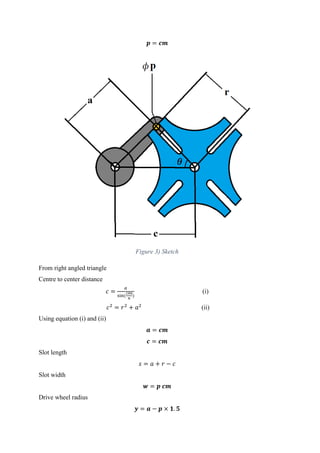
The document discusses the modeling and kinematic analysis of a Geneva mechanism, a device that converts rotary motion into indexed motion, commonly used in watches and conveyors. It details the modeling process using Creo Parametric, including the individual components of the mechanism and the assembly procedures. The kinematic analysis provided insights into the mechanism's design, yielding a graph that reflects the prescribed motions and confirms the effectiveness of the design without the need for costly physical testing.