Downloaded 199 times



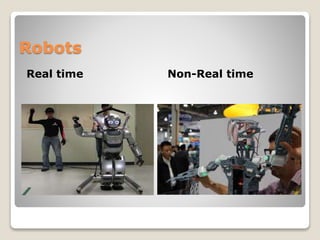



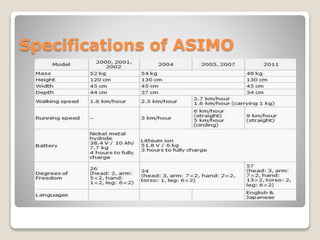
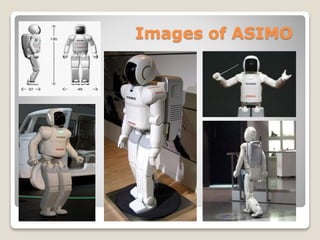
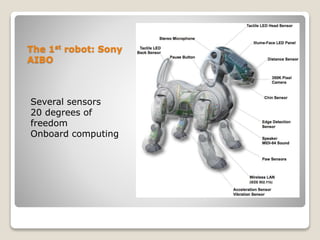
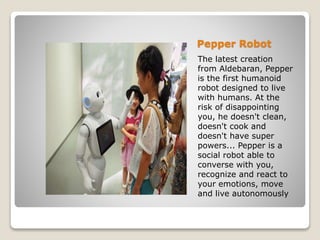



The document discusses various types of entertainment robots, focusing on their functionality, applications, and challenges. It highlights the usage of robots in different entertainment fields, including movies, music, and live performances, while detailing specific examples like ASIMO and Nao robots. Additionally, it addresses the advantages and disadvantages of real-time versus non-real-time robot performances.
































































![[Deck] What's New in Spark-Iceberg Integration via DSV2.pptx](https://cdn.slidesharecdn.com/ss_thumbnails/deckwhatsnewinspark-icebergintegrationviadsv2-260210005337-25955b12-thumbnail.jpg?width=640&height=640&fit=bounds)








